Potrebbero piacerti anche
- 1 - Analisi Strutturali Straus7 Capannoni Acciaio Progettazione Antincendio Crosti MarinoDocumento9 pagine1 - Analisi Strutturali Straus7 Capannoni Acciaio Progettazione Antincendio Crosti MarinoAlessandroAleottiNessuna valutazione finora
- Corso Base Di OleodinamicaDocumento2 pagineCorso Base Di OleodinamicaAlessandroAleottiNessuna valutazione finora
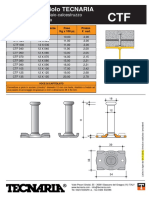
- CT F CTF Cahier Socotec It PDFDocumento22 pagineCT F CTF Cahier Socotec It PDFAlessandroAleottiNessuna valutazione finora
- SagomarioDocumento3 pagineSagomariofrancescolapoNessuna valutazione finora
- Allegato B 2016Documento2 pagineAllegato B 2016AlessandroAleottiNessuna valutazione finora
- TecnariaDocumento2 pagineTecnariaAlessandroAleottiNessuna valutazione finora
- CT F Listini Senzachiodi It PDFDocumento2 pagineCT F Listini Senzachiodi It PDFAlessandroAleottiNessuna valutazione finora
- TecnariaDocumento2 pagineTecnariaAlessandroAleottiNessuna valutazione finora
- CT F Catalogo ItDocumento9 pagineCT F Catalogo Ithusamyhorr-7049Nessuna valutazione finora
- Tubolari Caldi FreddoDocumento131 pagineTubolari Caldi Freddosimonetta_nardiNessuna valutazione finora
- Sagomario Ipe PDFDocumento3 pagineSagomario Ipe PDFAlessandroAleottiNessuna valutazione finora
- Specifica Fornitura GeneratoriDocumento16 pagineSpecifica Fornitura GeneratoriAlessandroAleottiNessuna valutazione finora
- Slide in Impianti OleodinamiciDocumento94 pagineSlide in Impianti OleodinamiciAlessandroAleottiNessuna valutazione finora
- Tubolari Caldi FreddoDocumento131 pagineTubolari Caldi Freddosimonetta_nardiNessuna valutazione finora
- Dispense Tecnica Delle CostruzioniDocumento265 pagineDispense Tecnica Delle CostruzioniFrancesca CastrichellaNessuna valutazione finora
- Straus 7Documento21 pagineStraus 7AlessandroAleottiNessuna valutazione finora
- Allegato A 2016Documento3 pagineAllegato A 2016AlessandroAleottiNessuna valutazione finora
- Ispesl Sollevamento Cose PersoneDocumento28 pagineIspesl Sollevamento Cose PersoneAlessandroAleottiNessuna valutazione finora
- Olympus - Obblighi Progettisti Fornitori Installatori (Macchine e Attrez...Documento27 pagineOlympus - Obblighi Progettisti Fornitori Installatori (Macchine e Attrez...AlessandroAleottiNessuna valutazione finora
- Structural-Modeling Cinque PDFDocumento16 pagineStructural-Modeling Cinque PDFAlessandroAleottiNessuna valutazione finora
- Metalcorde Catalogo 2011 8.6MBDocumento88 pagineMetalcorde Catalogo 2011 8.6MBAlessandroAleottiNessuna valutazione finora
- Capitolo 123Documento49 pagineCapitolo 123AlessandroAleottiNessuna valutazione finora
- Belleli - Calcolo AccelerazioniDocumento3 pagineBelleli - Calcolo AccelerazioniAlessandroAleottiNessuna valutazione finora
- Federmacchine - Sicurezza Delle Macchine e Testo Unico (Guida Per I Cost...Documento97 pagineFedermacchine - Sicurezza Delle Macchine e Testo Unico (Guida Per I Cost...AlessandroAleottiNessuna valutazione finora
- Atto Delegato Allegato III DOPDocumento6 pagineAtto Delegato Allegato III DOPAlessandroAleottiNessuna valutazione finora
- 4 Ore Alla SettimanaDocumento9 pagine4 Ore Alla Settimananimic_niciundeNessuna valutazione finora
- TC135 Risposta in Ordine Alla Richiesta Della Commissione EuropeaDocumento3 pagineTC135 Risposta in Ordine Alla Richiesta Della Commissione EuropeaPippo VenetoNessuna valutazione finora
- Ocd177 2629Documento451 pagineOcd177 2629AlessandroAleottiNessuna valutazione finora
- C10e 10084Documento2 pagineC10e 10084AlessandroAleottiNessuna valutazione finora
- Legge Di Bilancio 2017: Quadro Di Sintesi Degli InterventiDocumento78 pagineLegge Di Bilancio 2017: Quadro Di Sintesi Degli InterventiAlessandroAleottiNessuna valutazione finora