Potrebbero piacerti anche
- Impact of Festival EssayDocumento16 pagineImpact of Festival Essaynitin0010Nessuna valutazione finora
- Coroporate Tax Planning and Management: Neha Shivdayal GuptaDocumento107 pagineCoroporate Tax Planning and Management: Neha Shivdayal Guptanitin0010Nessuna valutazione finora
- Recruitment of Circle Based OfficersDocumento1 paginaRecruitment of Circle Based Officersnitin0010Nessuna valutazione finora
- Indian Company Law Regulates The Corporations Formed Under The Section 2Documento9 pagineIndian Company Law Regulates The Corporations Formed Under The Section 2nitin0010Nessuna valutazione finora
- Transper of PropertyDocumento25 pagineTransper of Propertynitin0010Nessuna valutazione finora
- University of MumbaiDocumento1 paginaUniversity of Mumbainitin0010Nessuna valutazione finora
- V ISHAKHADocumento16 pagineV ISHAKHAnitin0010100% (1)
- ExperienceDocumento1 paginaExperiencenitin0010Nessuna valutazione finora
- Lay OffDocumento11 pagineLay Offnitin0010Nessuna valutazione finora
- Dissertation PDFDocumento149 pagineDissertation PDFnitin00100% (1)
- Bed PPT HistoryDocumento8 pagineBed PPT Historynitin0010Nessuna valutazione finora
- DISSERTATIONDocumento144 pagineDISSERTATIONnitin0010Nessuna valutazione finora
- Right To Information EssayDocumento8 pagineRight To Information Essaynitin0010Nessuna valutazione finora
- Green MarketingDocumento73 pagineGreen Marketingnitin0010Nessuna valutazione finora
- Drug Addiction Causes and Remedial MeasuresDocumento15 pagineDrug Addiction Causes and Remedial Measuresnitin0010Nessuna valutazione finora
- Changing Lifestyle and Its ImplicationsDocumento26 pagineChanging Lifestyle and Its Implicationsnitin0010Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- DS IPRK18xxDL4x en 50109446 PDocumento4 pagineDS IPRK18xxDL4x en 50109446 PArthur Rueda CastilloNessuna valutazione finora
- Effect of Unified Power Quality Conditioner in Smart Grid Operation and ControlDocumento5 pagineEffect of Unified Power Quality Conditioner in Smart Grid Operation and ControlDrAshok Kumar TiwariNessuna valutazione finora
- Grid Connected Inverter Design GuideDocumento52 pagineGrid Connected Inverter Design GuideRakesh SandarativjuNessuna valutazione finora
- TOP244Documento52 pagineTOP244Rimla OtenNessuna valutazione finora
- 1117H PDFDocumento24 pagine1117H PDFThe RedfireNessuna valutazione finora
- Doc-Automatic Light ControlDocumento71 pagineDoc-Automatic Light ControlBenazir BegamNessuna valutazione finora
- An-1484 Design A SEPIC ConverterDocumento6 pagineAn-1484 Design A SEPIC ConverterbolermNessuna valutazione finora
- Utp3315tfl IIDocumento2 pagineUtp3315tfl IIGuillermo CornetNessuna valutazione finora
- Datasheet SL 4.5.0Documento20 pagineDatasheet SL 4.5.0Adrián ValenzuelaNessuna valutazione finora
- 46TMSS07R0 DC-DC ConvertorsDocumento18 pagine46TMSS07R0 DC-DC ConvertorsMohamed NasrNessuna valutazione finora
- Ass 2 WindDocumento10 pagineAss 2 WindŠämęh ËšśämNessuna valutazione finora
- 101 - 200 Transistor CircuitsDocumento119 pagine101 - 200 Transistor CircuitsrichardNessuna valutazione finora
- h3dkz TIMER OMRONDocumento25 pagineh3dkz TIMER OMRONMai Văn BáchNessuna valutazione finora
- MAX1682-MAX1683-Voltage DoublerDocumento9 pagineMAX1682-MAX1683-Voltage DoublerHaidong KimNessuna valutazione finora
- Basic Electronics by Bakshi PDFDocumento226 pagineBasic Electronics by Bakshi PDFnijuNessuna valutazione finora
- Measurement of Force, Torque and SpeedDocumento18 pagineMeasurement of Force, Torque and SpeedErxDNessuna valutazione finora
- Phase-Controlled Converter: ObjectivesDocumento8 paginePhase-Controlled Converter: Objectiveskafle_yrsNessuna valutazione finora
- VFDDocumento49 pagineVFDkisan singhNessuna valutazione finora
- Premier Magnetics IncDocumento2 paginePremier Magnetics IncMile ĐorđevićNessuna valutazione finora
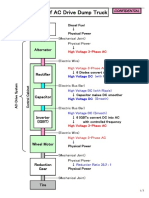
- Energy Flow of AC Drive Dump Truck: ConfidentialDocumento7 pagineEnergy Flow of AC Drive Dump Truck: Confidentialwilly torresNessuna valutazione finora
- Onsemi ATX PSU DesignDocumento37 pagineOnsemi ATX PSU Designusuariojuan100% (1)
- Low Cost Boost Converters Using LM3578A: Modes of OperationDocumento10 pagineLow Cost Boost Converters Using LM3578A: Modes of OperationErAshishNessuna valutazione finora
- A New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterDocumento9 pagineA New Mathematical Model and Control of A Three-Phase Ac-Dc Voltage Source ConverterrasoolNessuna valutazione finora
- Elettronica Santerno 4T0007BIK Manual 20186512013Documento18 pagineElettronica Santerno 4T0007BIK Manual 20186512013Jose Ederson Coelho SoaresNessuna valutazione finora
- 3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocumento8 pagine3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersHamza AbbasiNessuna valutazione finora
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocumento6 pagineDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiNessuna valutazione finora
- TDA8948JDocumento26 pagineTDA8948JjuliojuderNessuna valutazione finora
- Transformador Transmisor RedoxDocumento4 pagineTransformador Transmisor RedoxJorge RamirezNessuna valutazione finora
- EDC Lab ManualDocumento112 pagineEDC Lab ManualPradeep Kumar SNessuna valutazione finora
- NCP1653 DDocumento19 pagineNCP1653 Ddragon-red0816Nessuna valutazione finora