Potrebbero piacerti anche
- Time Response AnalysisDocumento151 pagineTime Response AnalysisTushar GuptaNessuna valutazione finora
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDa EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNessuna valutazione finora
- Ch-5 Time Res WebpageDocumento48 pagineCh-5 Time Res WebpageTushar GuptaNessuna valutazione finora
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDa EverandMathematical Tables: Tables of in G [z] for Complex ArgumentNessuna valutazione finora
- Transient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or CosDocumento38 pagineTransient Response Analysis: Test Signals: Impulse Step Ramp Sin And/or Cosomar9aNessuna valutazione finora
- Control Systems Formula SheetDocumento12 pagineControl Systems Formula SheetliamhrNessuna valutazione finora
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsDa EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsValutazione: 5 su 5 stelle5/5 (1)
- Modeling: ∞ −st 1 s 1 s n n! s −at 1 s+a ω s +ω s s +ωDocumento4 pagineModeling: ∞ −st 1 s 1 s n n! s −at 1 s+a ω s +ω s s +ωjameelahmadNessuna valutazione finora
- Chapter 2Documento18 pagineChapter 2jonthemesNessuna valutazione finora
- Control Systems Engineering D227 S.A.E. Solutions Tutorial 5 - System Response Self Assessment Exercise No.1Documento5 pagineControl Systems Engineering D227 S.A.E. Solutions Tutorial 5 - System Response Self Assessment Exercise No.1cataiceNessuna valutazione finora
- (A305) Otomatik Kontrol Ders Notu (Slayt)Documento27 pagine(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- Control Por Computador: January 15, 2014Documento24 pagineControl Por Computador: January 15, 2014turbodilanNessuna valutazione finora
- Formula Sheet Exam1Documento2 pagineFormula Sheet Exam1KeerthiPratheek ReddyNessuna valutazione finora
- EL-4701 Modelos de Sistemas: FormularioDocumento9 pagineEL-4701 Modelos de Sistemas: FormularioAngel RamirezNessuna valutazione finora
- Systems Response With Additional Poles and ZeroesDocumento26 pagineSystems Response With Additional Poles and ZeroesHafiz Usman MahmoodNessuna valutazione finora
- Equations Exam 421Documento2 pagineEquations Exam 421hay123ranNessuna valutazione finora
- Control Por Computador: November 12, 2013Documento17 pagineControl Por Computador: November 12, 2013turbodilanNessuna valutazione finora
- Chapter 2.2 Response Ist Order SystemsDocumento30 pagineChapter 2.2 Response Ist Order SystemsSyed AliNessuna valutazione finora
- Definición F (T) F(S) : Formulario de Transformada Z y Transformada de LaplaceDocumento1 paginaDefinición F (T) F(S) : Formulario de Transformada Z y Transformada de LaplaceLuis FernandoNessuna valutazione finora
- Module 2 - 2Documento68 pagineModule 2 - 2abcdNessuna valutazione finora
- Fourier Transform TablesDocumento9 pagineFourier Transform TablesOrder17Nessuna valutazione finora
- Chapter 2Documento10 pagineChapter 2floriscalcNessuna valutazione finora
- Transform TablesDocumento6 pagineTransform TablesNicholas TanNessuna valutazione finora
- Ass4 PDFDocumento7 pagineAss4 PDFbinu10eeeNessuna valutazione finora
- MEEM4700 Equation SheetDocumento3 pagineMEEM4700 Equation SheetNikhil ShahNessuna valutazione finora
- 293 PDFDocumento2 pagine293 PDFarief_7Nessuna valutazione finora
- Sample Sample Answe Questions Questions Er Hints: Cs / Acs W14 Lect 2012Documento57 pagineSample Sample Answe Questions Questions Er Hints: Cs / Acs W14 Lect 2012Timothy AshleyNessuna valutazione finora
- EL-4701 Modelos de Sistemas: FormularioDocumento9 pagineEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaNessuna valutazione finora
- Laplace Transform PropertiesDocumento2 pagineLaplace Transform PropertiesColin KingNessuna valutazione finora
- Unit Step Response of Second Order System With UndampedDocumento17 pagineUnit Step Response of Second Order System With UndampedSUJATA BANIKNessuna valutazione finora
- EE2 SignalsComms SCEE08007 Datasheet 2014 Complete PDFDocumento6 pagineEE2 SignalsComms SCEE08007 Datasheet 2014 Complete PDFErica StevensNessuna valutazione finora
- Frequency ResponseDocumento9 pagineFrequency ResponseAnanda RamanNessuna valutazione finora
- IC6501 Control Systems Formula Sheet: G(S) H(S) R(S) C(S)Documento1 paginaIC6501 Control Systems Formula Sheet: G(S) H(S) R(S) C(S)bhuvanadharaNessuna valutazione finora
- Analysis of LTI-Systems: 3.1 Initial ResponseDocumento97 pagineAnalysis of LTI-Systems: 3.1 Initial ResponseSergio LinNessuna valutazione finora
- Q2 2 Second - OrderDocumento30 pagineQ2 2 Second - OrderJay ChakraNessuna valutazione finora
- Steady-State Errors (202011)Documento45 pagineSteady-State Errors (202011)Azlina RamliNessuna valutazione finora
- Estabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieDocumento10 pagineEstabilidad Interna y Entrada-Salida de Sistemas Continuos: Udec - DieagustinpinochetNessuna valutazione finora
- Control PrinciplesDocumento91 pagineControl PrinciplesMayank KumarNessuna valutazione finora
- Analog Electronics Equation Sheet: Last NameDocumento1 paginaAnalog Electronics Equation Sheet: Last NameRadoslawNessuna valutazione finora
- CH 4: Open Loop Discrete Time Systems: Covered To This PointDocumento19 pagineCH 4: Open Loop Discrete Time Systems: Covered To This Pointalvarado02Nessuna valutazione finora
- Workbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsDocumento26 pagineWorkbook Workbook Workbook Workbook Workbook: Try Yourself QuestionsashutoshsinghjssNessuna valutazione finora
- Notas Matematicas para Electronica de PotenciaDocumento10 pagineNotas Matematicas para Electronica de PotenciaAndrés David Martínez MarteloNessuna valutazione finora
- Steady State ErrorsDocumento33 pagineSteady State Errorsasma mushtaqNessuna valutazione finora
- N Highest Value M M MDocumento31 pagineN Highest Value M M MGOWTHAMNessuna valutazione finora
- Assign 8 SolnDocumento5 pagineAssign 8 SolnabaytekinovicNessuna valutazione finora
- Arfken ExercisesDocumento26 pagineArfken Exercisesdoraemon4100% (1)
- ENAD Formula SheetDocumento7 pagineENAD Formula SheetRachel TanNessuna valutazione finora
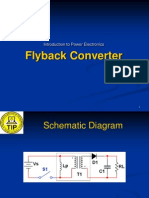
- Lesson 9 - Flyback ConverterDocumento31 pagineLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNessuna valutazione finora
- 1a. 180 Degree Root Locus, Za 5: Andrew Hung A09995772 MAE143c HW1Documento12 pagine1a. 180 Degree Root Locus, Za 5: Andrew Hung A09995772 MAE143c HW1badmitonfreak7025Nessuna valutazione finora
- Chapter - 3Documento45 pagineChapter - 3Swathi KalagatlaNessuna valutazione finora
- Chapter Five Z-Transform and Applications 5.1 Introduction To Z-TransformDocumento12 pagineChapter Five Z-Transform and Applications 5.1 Introduction To Z-Transformtesfay welayNessuna valutazione finora
- Modelling Discrete Time SystemsDocumento6 pagineModelling Discrete Time SystemsSandeep KumarNessuna valutazione finora
- EE561 Fall2013 Midterm SolDocumento5 pagineEE561 Fall2013 Midterm SolzoyosNessuna valutazione finora
- La PlaceDocumento2 pagineLa PlacehenriksagfossenNessuna valutazione finora
- 01 Review of Closed Loop ControlDocumento17 pagine01 Review of Closed Loop ControlferrarivcaNessuna valutazione finora
- 1 Transient (Step) Response Specifications For Underdamped Second Order SystemsDocumento6 pagine1 Transient (Step) Response Specifications For Underdamped Second Order Systemsمحيي الدين الكميشىNessuna valutazione finora
- hw2 SolDocumento11 paginehw2 SolSaied Aly SalamahNessuna valutazione finora
- Examples OfzTransformDocumento17 pagineExamples OfzTransformMohammad Gulam Ahamad100% (1)
- Phy DPP 01Documento1 paginaPhy DPP 01Harshit GargNessuna valutazione finora
- Class 9 NTSE-Maths: Answer The QuestionsDocumento12 pagineClass 9 NTSE-Maths: Answer The QuestionsHarshit GargNessuna valutazione finora
- Chem DPP 01Documento1 paginaChem DPP 01Harshit GargNessuna valutazione finora
- Class 9 NTSE-Maths: Answer The QuestionsDocumento13 pagineClass 9 NTSE-Maths: Answer The QuestionsHarshit GargNessuna valutazione finora
- Final Report PDFDocumento33 pagineFinal Report PDFHarshit GargNessuna valutazione finora
- Class 7 Olympiad: Answer The QuestionsDocumento13 pagineClass 7 Olympiad: Answer The QuestionsHarshit GargNessuna valutazione finora
- Miniaturized Dual Broadband Printed Slot Antenna With Parasitic Slot and PatchDocumento6 pagineMiniaturized Dual Broadband Printed Slot Antenna With Parasitic Slot and PatchHarshit GargNessuna valutazione finora
- Storage 4Documento15 pagineStorage 4Harshit GargNessuna valutazione finora
- Class 9 NTSE-Maths: Answer The QuestionsDocumento14 pagineClass 9 NTSE-Maths: Answer The QuestionsHarshit GargNessuna valutazione finora
- Reading CourseDocumento8 pagineReading CourseHarshit GargNessuna valutazione finora
- FTRE-2016-17-C-IX (Going To X) - PAPER-1-IQ+S&MDocumento20 pagineFTRE-2016-17-C-IX (Going To X) - PAPER-1-IQ+S&MDev100% (1)
- Probability Statistics SlidesDocumento54 pagineProbability Statistics SlidesHarshit GargNessuna valutazione finora
- Storage 2Documento17 pagineStorage 2Harshit GargNessuna valutazione finora
- Storage 3Documento9 pagineStorage 3Harshit GargNessuna valutazione finora
- Storage 5Documento10 pagineStorage 5Harshit GargNessuna valutazione finora
- Storage 1Documento10 pagineStorage 1Harshit GargNessuna valutazione finora
- Determination of Masses of STARSDocumento22 pagineDetermination of Masses of STARSHarshit GargNessuna valutazione finora
- Unit 1 Astronomical Scales: StructureDocumento24 pagineUnit 1 Astronomical Scales: StructureHarshit GargNessuna valutazione finora
- C R G GH 1: Stability of A System MeansDocumento15 pagineC R G GH 1: Stability of A System MeansHarshit GargNessuna valutazione finora
- Elementary Block MethodDocumento7 pagineElementary Block MethodBoris MirandaNessuna valutazione finora
- QUBE-Servo LQR Control Workbook (Student)Documento6 pagineQUBE-Servo LQR Control Workbook (Student)Rizkie Denny PratamaNessuna valutazione finora
- Data Normalization and StandardizationDocumento6 pagineData Normalization and StandardizationAllan SilvaNessuna valutazione finora
- Gothic 3 Cheats, Gothic 3 Walk Through - GameSpotDocumento224 pagineGothic 3 Cheats, Gothic 3 Walk Through - GameSpothanamuko_2000Nessuna valutazione finora
- Central Processing Unit: From Wikipedia, The Free EncyclopediaDocumento18 pagineCentral Processing Unit: From Wikipedia, The Free EncyclopediaJoe joNessuna valutazione finora
- Smart Math Ex 2Documento5 pagineSmart Math Ex 2lazymathsNessuna valutazione finora
- Template ProgrammingDocumento80 pagineTemplate ProgrammingAswani MucharlaNessuna valutazione finora
- 6C0065Documento4 pagine6C0065Joshua prabuNessuna valutazione finora
- Bill of Materials in Sap PP Beginners GuideDocumento64 pagineBill of Materials in Sap PP Beginners GuideAnil ObilisettiNessuna valutazione finora
- Marazzi Listino 2010Documento77 pagineMarazzi Listino 2010mmcronbergNessuna valutazione finora
- 07cp18 Neural Networks and Applications 3 0 0 100Documento2 pagine07cp18 Neural Networks and Applications 3 0 0 100tkec_csedeptNessuna valutazione finora
- Cisco C2960X-STACK OverviewDocumento7 pagineCisco C2960X-STACK OverviewMeela ZengNessuna valutazione finora
- Data ModelingDocumento17 pagineData ModelingJurgen RamírezNessuna valutazione finora
- Government Engineering College, Rajkot A Report On My HostelDocumento60 pagineGovernment Engineering College, Rajkot A Report On My HostelSangita Bagada0% (2)
- Mathematics T Trial Paper Semester 2Documento5 pagineMathematics T Trial Paper Semester 2Loo Siaw Choon100% (1)
- Cover LetterDocumento2 pagineCover Letterpechan07Nessuna valutazione finora
- MultiplexersDocumento23 pagineMultiplexersAsim WarisNessuna valutazione finora
- Parametric Sweeps in AdsDocumento7 pagineParametric Sweeps in AdssukusportyNessuna valutazione finora
- Chapter 1 Inroduction: 1. Introducing Primavera Project ManagementDocumento186 pagineChapter 1 Inroduction: 1. Introducing Primavera Project ManagementPriyanshu SoniNessuna valutazione finora
- Case Study Ariba by Group 2Documento17 pagineCase Study Ariba by Group 2Sophie KakkerNessuna valutazione finora
- Types of Web Browsers Google Chrome Microsoft Internet Explorer Mozilla Firefox Opera Apple SafariDocumento10 pagineTypes of Web Browsers Google Chrome Microsoft Internet Explorer Mozilla Firefox Opera Apple Safarisurbhi jainNessuna valutazione finora
- UNIT-7 OF TAW10-1 Working With Elementary Data ObjectsDocumento11 pagineUNIT-7 OF TAW10-1 Working With Elementary Data ObjectsSandeep AminNessuna valutazione finora
- Answer All Questions in This SectionDocumento9 pagineAnswer All Questions in This SectionSathis KumarNessuna valutazione finora
- JF 5 1 PracticeDocumento3 pagineJF 5 1 PracticeRizka AuliaNessuna valutazione finora
- Comp Arch Syllabus 6-29-2017Documento4 pagineComp Arch Syllabus 6-29-2017Karthikeya MamillapalliNessuna valutazione finora
- PeopleSoft Excel To CI For CustomerDocumento96 paginePeopleSoft Excel To CI For CustomerhimanshuNessuna valutazione finora
- Test and Diagnosis System: VLF Sinus 45 KVDocumento2 pagineTest and Diagnosis System: VLF Sinus 45 KVNur FajarNessuna valutazione finora
- Adler32 Rolling Checksum EquationDocumento4 pagineAdler32 Rolling Checksum Equationatulindore2Nessuna valutazione finora
- M075031 DesfireDocumento80 pagineM075031 DesfireSaruhasan Palarajah100% (1)
- Oracle Database 12c SQLPlus® Quick Reference PDFDocumento18 pagineOracle Database 12c SQLPlus® Quick Reference PDFBupBeChanhNessuna valutazione finora




![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)