Potrebbero piacerti anche
- General Principles of Machine Tool DesignDocumento16 pagineGeneral Principles of Machine Tool DesignChiragJansari100% (1)
- Kinematics of Machine ToolsDocumento28 pagineKinematics of Machine ToolsRohit Kaushik100% (6)
- 1 Design of Machine Tool DrivesDocumento23 pagine1 Design of Machine Tool DrivesFurkan Ahmad100% (1)
- Adaptive Design of Machine Tool GearboxesDocumento9 pagineAdaptive Design of Machine Tool Gearboxesأحمد دعبسNessuna valutazione finora
- Part 5 MT Drives and Mechanisms 1Documento11 paginePart 5 MT Drives and Mechanisms 1Zayed KhanNessuna valutazione finora
- Classification of Machine ToolsDocumento7 pagineClassification of Machine ToolsglisoNessuna valutazione finora
- Press Working TerminologyDocumento16 paginePress Working TerminologyAadrika UmashankarNessuna valutazione finora
- NC CNC Machine ToolDocumento50 pagineNC CNC Machine ToolShoaib MultaniNessuna valutazione finora
- Merchant's Circle NotsDocumento5 pagineMerchant's Circle NotsSaravanan MathiNessuna valutazione finora
- Clamping & Clamping DevicesDocumento52 pagineClamping & Clamping DevicesTousif RezaNessuna valutazione finora
- UNIT-2 Design of Spur GearDocumento56 pagineUNIT-2 Design of Spur GearMarthandeNessuna valutazione finora
- Metal Forming LabDocumento57 pagineMetal Forming LabRohitGuptaNessuna valutazione finora
- Thread Cutting and Its MethodsDocumento24 pagineThread Cutting and Its MethodsMr.N.S. NateshNessuna valutazione finora
- Broaching BasicsDocumento5 pagineBroaching Basicssaritha0003Nessuna valutazione finora
- Machining Science 2 Solution Copy 2Documento6 pagineMachining Science 2 Solution Copy 2DIPAK VINAYAK SHIRBHATENessuna valutazione finora
- Generation Motions of Machine Tools, Requirements of Machine Tools, Fundamental of Machine Tool DesignDocumento50 pagineGeneration Motions of Machine Tools, Requirements of Machine Tools, Fundamental of Machine Tool DesignDeepan RajNessuna valutazione finora
- 1 Design of Machine Tool DrivesDocumento23 pagine1 Design of Machine Tool DrivesFurkan AhmadNessuna valutazione finora
- 76-5-Gear BoxDocumento14 pagine76-5-Gear Boxrip111176100% (2)
- Gear Box DesignDocumento74 pagineGear Box DesignRanjib BiswasNessuna valutazione finora
- 12ed11 - Advanced Machine Tool DesignDocumento15 pagine12ed11 - Advanced Machine Tool DesignBradeesh MoorthyNessuna valutazione finora
- Mass Moment of Inertia Formulas PDFDocumento2 pagineMass Moment of Inertia Formulas PDFAsrar AhmedNessuna valutazione finora
- 500 Mechanical Sy MP-I Smart QuestionsDocumento23 pagine500 Mechanical Sy MP-I Smart QuestionsGeorge CamachoNessuna valutazione finora
- (PPT) Drawing 1Documento29 pagine(PPT) Drawing 1AXELNessuna valutazione finora
- MillingDocumento33 pagineMillingRavichandran G0% (1)
- Unit II - Turning MachinesDocumento137 pagineUnit II - Turning MachinesKanda SamyNessuna valutazione finora
- Single Point Cutting ToolDocumento16 pagineSingle Point Cutting ToolSoumik DasNessuna valutazione finora
- Milling: Prepared By: Dinbandhu Singh 1Documento23 pagineMilling: Prepared By: Dinbandhu Singh 1Dino SinghNessuna valutazione finora
- Lecture 3 Introduction To Machine Tool Drives and MechanismsDocumento59 pagineLecture 3 Introduction To Machine Tool Drives and Mechanismskhalil alhatab100% (1)
- Die and Punch AssemblyDocumento14 pagineDie and Punch AssemblyPiyal ChakrabortyNessuna valutazione finora
- Operations in TurningDocumento8 pagineOperations in Turningcanavarsanayok100% (1)
- Sheet Metal Form Vinay 1226927986919169 9Documento83 pagineSheet Metal Form Vinay 1226927986919169 9Nhan LeNessuna valutazione finora
- Machine Tool # 1Documento13 pagineMachine Tool # 1api-26046805Nessuna valutazione finora
- Nano Finishing TechniquesDocumento30 pagineNano Finishing TechniquesSujay SaxenaNessuna valutazione finora
- Machine Tool DesignDocumento2 pagineMachine Tool DesignBhavesh Pipaliya50% (2)
- UNIT-1 Locating and Clamping: S.Dharani KumarDocumento86 pagineUNIT-1 Locating and Clamping: S.Dharani KumarSaivineeth Gampa100% (1)
- Machining ProcessDocumento51 pagineMachining ProcessSudeepNessuna valutazione finora
- MP II - Lecture 3 - Thread and Gear ManufacturingDocumento57 pagineMP II - Lecture 3 - Thread and Gear ManufacturingArif Hossain100% (1)
- 156 180Documento181 pagine156 180Kurnia Adi WibowoNessuna valutazione finora
- Press Working Operation NOTESDocumento6 paginePress Working Operation NOTESZakyNessuna valutazione finora
- 1.machine Tool Design Assignment 2017Documento6 pagine1.machine Tool Design Assignment 2017Charles OndiekiNessuna valutazione finora
- Punch and DieDocumento16 paginePunch and DieNani DatrikaNessuna valutazione finora
- Manufacturing of Spur Gear: Aim of The ExperimentDocumento5 pagineManufacturing of Spur Gear: Aim of The ExperimentParameshwara MeenaNessuna valutazione finora
- Design and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS WorkbenchDocumento27 pagineDesign and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS Workbenchamu100% (1)
- CH 2 Metal Cutting ToolsDocumento19 pagineCH 2 Metal Cutting ToolsAlex AdmasNessuna valutazione finora
- Unit One Material and Geometry of Cutting Tools 2015Documento46 pagineUnit One Material and Geometry of Cutting Tools 2015elnat feyisa100% (1)
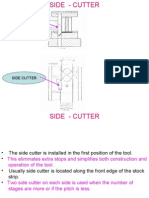
- Side CutterDocumento7 pagineSide Cutterbabuty100% (2)
- Machining Forces and Merchant's Circle Diagram (MCD)Documento40 pagineMachining Forces and Merchant's Circle Diagram (MCD)AswinNessuna valutazione finora
- Stretch Forming JomyDocumento33 pagineStretch Forming JomyJoNessuna valutazione finora
- Spur Gears - SlidesDocumento45 pagineSpur Gears - SlidesKim Jeff BeringuelNessuna valutazione finora
- MACHINING-lathe and Milling)Documento29 pagineMACHINING-lathe and Milling)YosephNessuna valutazione finora
- CNC of Machine ToolsDocumento16 pagineCNC of Machine ToolsNirmalaThangaveluNessuna valutazione finora
- Regulation of Speed and Feed RatesDocumento38 pagineRegulation of Speed and Feed RatesSudipta Paul100% (7)
- Gear Cutting AttachmentDocumento40 pagineGear Cutting AttachmentGoutham Reddy100% (1)
- Power SawDocumento5 paginePower SawGodfrey Matii100% (1)
- Unit I - Theory of Metal CuttingDocumento111 pagineUnit I - Theory of Metal CuttingSaravana KumarNessuna valutazione finora
- JJ104 Workshop Technology Chapter7 Grinding MachineDocumento19 pagineJJ104 Workshop Technology Chapter7 Grinding MachineAh Tiang100% (1)
- Automats and Tool LayoutsDocumento20 pagineAutomats and Tool LayoutsAyesha IshuNessuna valutazione finora
- Machine Tool Design Lab ManualDocumento40 pagineMachine Tool Design Lab ManualRohitGupta100% (1)
- CST Awareness Seminar - 26-27 November 2016 - Registration FormDocumento5 pagineCST Awareness Seminar - 26-27 November 2016 - Registration FormRohitGuptaNessuna valutazione finora
- 4th Sem SyllabusDocumento7 pagine4th Sem SyllabusRohitGuptaNessuna valutazione finora
- 16 17Documento3 pagine16 17RohitGuptaNessuna valutazione finora
- Modified B.tech - 1st Year Syllabus MechanicalDocumento14 pagineModified B.tech - 1st Year Syllabus MechanicalRohitGuptaNessuna valutazione finora
- Machine Drawing Strength of Materials LabDocumento9 pagineMachine Drawing Strength of Materials LabRohitGuptaNessuna valutazione finora
- ContactDocumento17 pagineContactRohitGupta0% (1)
- SopDocumento2 pagineSopRohitGuptaNessuna valutazione finora
- FAQ Prospective Student 061515Documento10 pagineFAQ Prospective Student 061515RohitGuptaNessuna valutazione finora
- Common IdiomsDocumento7 pagineCommon IdiomsRohitGuptaNessuna valutazione finora
- Time Table Class ViseDocumento12 pagineTime Table Class ViseRohitGuptaNessuna valutazione finora
- Chapter 13Documento22 pagineChapter 13RohitGupta0% (1)
- Roll List of B.tech V Sem 2015-16Documento26 pagineRoll List of B.tech V Sem 2015-16RohitGuptaNessuna valutazione finora
- University of Michigan Georgia Institute of Technology University of Illinois at Urbana-ChampaignDocumento1 paginaUniversity of Michigan Georgia Institute of Technology University of Illinois at Urbana-ChampaignRohitGuptaNessuna valutazione finora
- Autocad QuizaDocumento3 pagineAutocad QuizaRohitGuptaNessuna valutazione finora
- P7IDocumento1 paginaP7IRohitGuptaNessuna valutazione finora
- SM&CG Lab QuizDocumento2 pagineSM&CG Lab QuizRohitGuptaNessuna valutazione finora
- Office of The Head Department of Mechanical EngieneirngDocumento2 pagineOffice of The Head Department of Mechanical EngieneirngRohitGuptaNessuna valutazione finora
- Rolling, Forging, Extrusion & DrawingDocumento13 pagineRolling, Forging, Extrusion & DrawingMuhammad Ali AbroNessuna valutazione finora
- SQL TutorialDocumento200 pagineSQL Tutorialroamer10100% (1)
- Office of The Head Department of Mechanical EngieneirngDocumento2 pagineOffice of The Head Department of Mechanical EngieneirngRohitGuptaNessuna valutazione finora
- British Council IELTS Online ApplicationDocumento2 pagineBritish Council IELTS Online ApplicationRohitGuptaNessuna valutazione finora
- 1st Yr Quiz Ans - RevisedDocumento1 pagina1st Yr Quiz Ans - RevisedRohitGuptaNessuna valutazione finora
- Format of Faculty ProfileDocumento5 pagineFormat of Faculty ProfileRohitGuptaNessuna valutazione finora
- Auto Cad LabDocumento5 pagineAuto Cad LabRohitGuptaNessuna valutazione finora
- Machine Tool Design Lab ManualDocumento40 pagineMachine Tool Design Lab ManualRohitGupta100% (1)
- I Year Quiz111Documento2 pagineI Year Quiz111RohitGuptaNessuna valutazione finora
- Office of The Head Department of Mechanical Engieneirng Rajasthan Technical University KotaDocumento2 pagineOffice of The Head Department of Mechanical Engieneirng Rajasthan Technical University KotaRohitGuptaNessuna valutazione finora
- Full Text 01Documento62 pagineFull Text 01RohitGuptaNessuna valutazione finora
- Appointment RecieptDocumento3 pagineAppointment RecieptRohitGuptaNessuna valutazione finora
- GATE 2014 Civil Engineering Keys & Solution (Evening Session)Documento36 pagineGATE 2014 Civil Engineering Keys & Solution (Evening Session)Lokesh Kumar100% (1)
- Laboratory Procedures For Mining Pelletizing Characterization of Iron Ore ConcentrationDocumento9 pagineLaboratory Procedures For Mining Pelletizing Characterization of Iron Ore ConcentrationgeodasNessuna valutazione finora
- Rodolfo Gambini - Lectures On Loop Quantum GravityDocumento92 pagineRodolfo Gambini - Lectures On Loop Quantum GravityArsLexii100% (1)
- Stars and Solar System McqsDocumento4 pagineStars and Solar System McqsDev RajuNessuna valutazione finora
- 2.3 Analysing Series and Parallel CircuitsDocumento16 pagine2.3 Analysing Series and Parallel CircuitssfwongNessuna valutazione finora
- Joseph S. Alford: What Is A Bioprocess?Documento8 pagineJoseph S. Alford: What Is A Bioprocess?rhabarberrhabarberNessuna valutazione finora
- Electroblot User Manual UG - TE 62 Transfer Cooled UnitDocumento26 pagineElectroblot User Manual UG - TE 62 Transfer Cooled UnitCharisse AlcosNessuna valutazione finora
- Performance of Type III Stilling Basins Stepped Spillway Studies PDFDocumento27 paginePerformance of Type III Stilling Basins Stepped Spillway Studies PDFAnonymous cncdtlNNessuna valutazione finora
- Finite Volume MethodDocumento2 pagineFinite Volume MethodRhea MambaNessuna valutazione finora
- Geochemistry Interview Questions and Answers 1931 PDFDocumento12 pagineGeochemistry Interview Questions and Answers 1931 PDFpeterjo raveloNessuna valutazione finora
- Heat Capacity Lab 02 14 09Documento5 pagineHeat Capacity Lab 02 14 09api-210028385Nessuna valutazione finora
- Irjet V4i4259 PDFDocumento4 pagineIrjet V4i4259 PDFArunRajNessuna valutazione finora
- Torreti - Bachelard e FenomenotecnicaDocumento19 pagineTorreti - Bachelard e FenomenotecnicaGabriel Kafure da RochaNessuna valutazione finora
- Photometric SystemsDocumento46 paginePhotometric SystemsCaioPaesNessuna valutazione finora
- Exercise # 1.1Documento1 paginaExercise # 1.1iamniczdejzNessuna valutazione finora
- Interaction of Mind and Body by Rene DescartesDocumento5 pagineInteraction of Mind and Body by Rene Descartesgudgirlz86Nessuna valutazione finora
- UG11T2702 Advanced Marine Control Engg & AutomationDocumento3 pagineUG11T2702 Advanced Marine Control Engg & AutomationSrinivasan PrakashNessuna valutazione finora
- Anshuman ProjectDocumento4 pagineAnshuman ProjectShivani DahiyaNessuna valutazione finora
- Trigonometric Leveling - Heights and Distances Problem (Two Exercises)Documento1 paginaTrigonometric Leveling - Heights and Distances Problem (Two Exercises)RadhaAnanthalekshmiNessuna valutazione finora
- Physics Lab ReportDocumento3 paginePhysics Lab Reportapi-263389150Nessuna valutazione finora
- Geometric Sequences & SeriesDocumento6 pagineGeometric Sequences & SerieswolfretonmathsNessuna valutazione finora
- Fluid StaticDocumento24 pagineFluid StaticNurhidayah AzmiNessuna valutazione finora
- WMM ProceduresDocumento2 pagineWMM ProceduresJay Gandhi100% (1)
- In Physics and Fiction, A Wormhole IsDocumento5 pagineIn Physics and Fiction, A Wormhole IsSouktik_Roy_2983Nessuna valutazione finora
- Great Circle Sailing Formulas and Voyage PlanningDocumento2 pagineGreat Circle Sailing Formulas and Voyage Planningmsk5in100% (1)
- Bruce R. Sutherland - Internal Gravity Waves-Cambridge University Press (2010) PDFDocumento395 pagineBruce R. Sutherland - Internal Gravity Waves-Cambridge University Press (2010) PDFVAIBHAV SHUKLANessuna valutazione finora
- Bahagian B Sains Upsr 2013Documento55 pagineBahagian B Sains Upsr 2013Atsani KatminNessuna valutazione finora
- Lateral Torsional Buckling of Steel BeamsDocumento8 pagineLateral Torsional Buckling of Steel BeamsapirakqNessuna valutazione finora
- Challenging Glass 2Documento7 pagineChallenging Glass 2Vassil VassilevNessuna valutazione finora
- ExtraOrdinary Technology Tensor RingsDocumento6 pagineExtraOrdinary Technology Tensor RingsMiguel Angelum100% (11)