Potrebbero piacerti anche
- Integration of Rational FractionsDocumento13 pagineIntegration of Rational FractionsJanesha100% (1)
- Chaman Lal Setia Exports Ltd fundamentals remain intactDocumento18 pagineChaman Lal Setia Exports Ltd fundamentals remain intactbharat005Nessuna valutazione finora
- Math For Machine Learning: 1.1 Differential CalculusDocumento21 pagineMath For Machine Learning: 1.1 Differential CalculusjoekowalskyNessuna valutazione finora
- Very Important Q3Documento24 pagineVery Important Q3Fatima Ainmardiah SalamiNessuna valutazione finora
- Ridge 3Documento4 pagineRidge 3manishnegiiNessuna valutazione finora
- Piecewise linear regression in R with lm() and segmented packagesDocumento4 paginePiecewise linear regression in R with lm() and segmented packagesStanley YongNessuna valutazione finora
- Mathematics 4330/5344 - # 3 Loops, Conditionals, Examples and ProgrammingDocumento11 pagineMathematics 4330/5344 - # 3 Loops, Conditionals, Examples and ProgrammingAlthara BaldagoNessuna valutazione finora
- Applied Linear RegressionDocumento6 pagineApplied Linear RegressionJeanette Karen FaigalNessuna valutazione finora
- Cubic Splines and Matlab FunctionsDocumento6 pagineCubic Splines and Matlab FunctionsAleksa Aki LazarevicNessuna valutazione finora
- Integration by PartsDocumento12 pagineIntegration by PartsAlbert AwoponeNessuna valutazione finora
- Bab 1Documento8 pagineBab 1jak92Nessuna valutazione finora
- A Method For The Approximation of Functions Defined by Formal Series ExpansionsDocumento13 pagineA Method For The Approximation of Functions Defined by Formal Series ExpansionskensaiiNessuna valutazione finora
- Appendix Nonparametric RegressionDocumento17 pagineAppendix Nonparametric Regressionamara abdelkarimeNessuna valutazione finora
- StewartCalc7e 01 02Documento54 pagineStewartCalc7e 01 02Nurhidayah Mulia100% (1)
- Basic MATLAB Functions and Operations Used in ME 205Documento52 pagineBasic MATLAB Functions and Operations Used in ME 205jiajun898Nessuna valutazione finora
- Ulti Region Segmentation Using Graph CutsDocumento8 pagineUlti Region Segmentation Using Graph CutsLokesh KancharlaNessuna valutazione finora
- Mathematics For Economics (Implicit Function Theorm)Documento10 pagineMathematics For Economics (Implicit Function Theorm)ARUPARNA MAITYNessuna valutazione finora
- CS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Documento8 pagineCS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)patrickNessuna valutazione finora
- Gradient Methods For Minimizing Composite Objective FunctionDocumento31 pagineGradient Methods For Minimizing Composite Objective Functionegv2000Nessuna valutazione finora
- Gen Math Q1 Mod 1Documento21 pagineGen Math Q1 Mod 1Joselito UbaldoNessuna valutazione finora
- MAT10f Midterm PDFDocumento19 pagineMAT10f Midterm PDFJulius BoitizonNessuna valutazione finora
- General Mathematics - M02 - L03Documento10 pagineGeneral Mathematics - M02 - L03Ji PaoNessuna valutazione finora
- ENGM541 Lab5 Runge Kutta SimulinkstatespaceDocumento5 pagineENGM541 Lab5 Runge Kutta SimulinkstatespaceAbiodun GbengaNessuna valutazione finora
- Survey of Finite Element Shape FunctionsDocumento9 pagineSurvey of Finite Element Shape FunctionsvtalatsNessuna valutazione finora
- CS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Documento8 pagineCS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Achuthan SekarNessuna valutazione finora
- Constrained OptimizationDocumento10 pagineConstrained OptimizationCourtney WilliamsNessuna valutazione finora
- Module 2, Lesson 4Documento9 pagineModule 2, Lesson 4alayca cabatanaNessuna valutazione finora
- Math & CS Functions Calculus Linear AlgebraDocumento24 pagineMath & CS Functions Calculus Linear AlgebraDhinakar ReddyNessuna valutazione finora
- FormuleDocumento2 pagineFormuleErvinNessuna valutazione finora
- A ApproximationsDocumento8 pagineA ApproximationschatuusumitavaNessuna valutazione finora
- Numerical Computing Lab 3Documento8 pagineNumerical Computing Lab 3Aamna ImranNessuna valutazione finora
- MA124 Maths by Computer Week 8 Assignment: Solution 8A:Root FindingDocumento14 pagineMA124 Maths by Computer Week 8 Assignment: Solution 8A:Root FindingKyle ByrneNessuna valutazione finora
- Matematika Teknik (Tei 101) Preliminary: Warsun Najib, S.T., M.SCDocumento18 pagineMatematika Teknik (Tei 101) Preliminary: Warsun Najib, S.T., M.SCjojonNessuna valutazione finora
- 3 IntegralsDocumento33 pagine3 IntegralsRupa PaulNessuna valutazione finora
- REVIEW OF SCHOOL MATH LIMITS AND INTEGRALSDocumento13 pagineREVIEW OF SCHOOL MATH LIMITS AND INTEGRALSwidhissNessuna valutazione finora
- State Space RealizationsDocumento6 pagineState Space RealizationsEron NetoNessuna valutazione finora
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDocumento29 pagineA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113Nessuna valutazione finora
- INTRODUCTION TO STATISTICS USING RDocumento20 pagineINTRODUCTION TO STATISTICS USING REduard MarsNessuna valutazione finora
- Final 13Documento9 pagineFinal 13نورالدين بوجناحNessuna valutazione finora
- BITSAT-2023-Paper-Memory-BasedDocumento19 pagineBITSAT-2023-Paper-Memory-Basedkrishbhatia1503Nessuna valutazione finora
- Supplement 1: Toolkit Functions: What Is A Function?Documento14 pagineSupplement 1: Toolkit Functions: What Is A Function?IsopodlegendNessuna valutazione finora
- Functions: A Review in 40 CharactersDocumento7 pagineFunctions: A Review in 40 CharactersTruKNessuna valutazione finora
- Calculus 1 Topic 1Documento9 pagineCalculus 1 Topic 1hallel jhon butacNessuna valutazione finora
- F (X) Is ReviewedDocumento18 pagineF (X) Is ReviewedSumedh KakdeNessuna valutazione finora
- Matlab Notes for Differential EquationsDocumento14 pagineMatlab Notes for Differential EquationsShelly ChandlerNessuna valutazione finora
- Variational calculus introduction to machine learningDocumento7 pagineVariational calculus introduction to machine learningAlexandersierraNessuna valutazione finora
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocumento4 pagineESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaNessuna valutazione finora
- MohemDocumento6 pagineMohemdaimon_pNessuna valutazione finora
- Rayleigh RitzDocumento10 pagineRayleigh RitzGeorge Alexander El-MallakhNessuna valutazione finora
- Functions and Graphs IntmathDocumento61 pagineFunctions and Graphs IntmathsmeenaNessuna valutazione finora
- Lab 2Documento14 pagineLab 2Tahsin Zaman TalhaNessuna valutazione finora
- MM HA3 SolutionDocumento21 pagineMM HA3 SolutionVojvodaAlbertNessuna valutazione finora
- Introduction To Matlab: Luke DickensDocumento25 pagineIntroduction To Matlab: Luke DickensRohan DuttaNessuna valutazione finora
- Gen Math Mod 1Documento21 pagineGen Math Mod 1Joselito Ubaldo100% (1)
- Computation of Parameters in Linear Models - Linear RegressionDocumento26 pagineComputation of Parameters in Linear Models - Linear RegressioncegarciaNessuna valutazione finora
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocumento5 pagineCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiNessuna valutazione finora
- A-level Maths Revision: Cheeky Revision ShortcutsDa EverandA-level Maths Revision: Cheeky Revision ShortcutsValutazione: 3.5 su 5 stelle3.5/5 (8)
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Da EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Valutazione: 4 su 5 stelle4/5 (2)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Da EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Valutazione: 2.5 su 5 stelle2.5/5 (2)
- Event Study PostDocumento5 pagineEvent Study PostPete Jacopo Belbo CayaNessuna valutazione finora
- Linear Regression Notes and PitfallsDocumento5 pagineLinear Regression Notes and PitfallsPete Jacopo Belbo CayaNessuna valutazione finora
- Set 5Documento52 pagineSet 5Ron ChanNessuna valutazione finora
- Book Notes - The Thirty Years War PDFDocumento1 paginaBook Notes - The Thirty Years War PDFPete Jacopo Belbo CayaNessuna valutazione finora
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocumento4 pagineESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaNessuna valutazione finora
- Re SamplingDocumento10 pagineRe SamplingPete Jacopo Belbo CayaNessuna valutazione finora
- Notes 2: Additional Vocab, Sobolev SpacesDocumento1 paginaNotes 2: Additional Vocab, Sobolev SpacesPete Jacopo Belbo CayaNessuna valutazione finora
- Scientific Computing Assignment 1Documento5 pagineScientific Computing Assignment 1Pete Jacopo Belbo CayaNessuna valutazione finora
- Logistic Regression Analysis of Credit Card Default RiskDocumento29 pagineLogistic Regression Analysis of Credit Card Default RiskPete Jacopo Belbo Caya100% (1)
- Bias Variance and Cross Validation NotesDocumento1 paginaBias Variance and Cross Validation NotesPete Jacopo Belbo CayaNessuna valutazione finora
- Re SamplingDocumento10 pagineRe SamplingPete Jacopo Belbo CayaNessuna valutazione finora
- LcurveDocumento23 pagineLcurvePete Jacopo Belbo CayaNessuna valutazione finora
- Notes 1: Introduction and DefinitionsDocumento3 pagineNotes 1: Introduction and DefinitionsPete Jacopo Belbo CayaNessuna valutazione finora
- Exploratory Analysis1Documento2 pagineExploratory Analysis1Pete Jacopo Belbo CayaNessuna valutazione finora
- Bias Variance and Cross Validation NotesDocumento1 paginaBias Variance and Cross Validation NotesPete Jacopo Belbo CayaNessuna valutazione finora
- Study Guide For The Mathematics of Statistical Learning: Peter Caya 2/26/2016Documento3 pagineStudy Guide For The Mathematics of Statistical Learning: Peter Caya 2/26/2016Pete Jacopo Belbo CayaNessuna valutazione finora
- Scientific Computing Notes 10-17Documento2 pagineScientific Computing Notes 10-17Pete Jacopo Belbo CayaNessuna valutazione finora
- Morozov's Principle for Regularizing Inverse ProblemsDocumento4 pagineMorozov's Principle for Regularizing Inverse ProblemsPete Jacopo Belbo CayaNessuna valutazione finora
- Homework 8 NotesDocumento12 pagineHomework 8 NotesPete Jacopo Belbo CayaNessuna valutazione finora
- Advection Equation NotesDocumento2 pagineAdvection Equation NotesPete Jacopo Belbo CayaNessuna valutazione finora
- Covar Matrix Proof StudentizedResidualsDocumento3 pagineCovar Matrix Proof StudentizedResidualsPete Jacopo Belbo CayaNessuna valutazione finora
- Homework 9 Q1Documento2 pagineHomework 9 Q1Pete Jacopo Belbo CayaNessuna valutazione finora
- Npde Notes 10 - 30Documento4 pagineNpde Notes 10 - 30Pete Jacopo Belbo CayaNessuna valutazione finora
- Basic Notes Project 2Documento3 pagineBasic Notes Project 2Pete Jacopo Belbo CayaNessuna valutazione finora
- Kunisch and Zou NotesDocumento7 pagineKunisch and Zou NotesPete Jacopo Belbo CayaNessuna valutazione finora
- Question 4 Scientific ComputingDocumento3 pagineQuestion 4 Scientific ComputingPete Jacopo Belbo CayaNessuna valutazione finora
- Lecture 2 NPDEDocumento3 pagineLecture 2 NPDEPete Jacopo Belbo CayaNessuna valutazione finora
- Fact Sheet Functional AnalysisDocumento9 pagineFact Sheet Functional AnalysisPete Jacopo Belbo CayaNessuna valutazione finora
- Linear PDE Plane Wave Dispersion RelationDocumento2 pagineLinear PDE Plane Wave Dispersion RelationPete Jacopo Belbo CayaNessuna valutazione finora
- Chapter 3: Elements of Demand and SupplyDocumento19 pagineChapter 3: Elements of Demand and SupplySerrano EUNessuna valutazione finora
- Laundry & Home Care: Key Financials 1Documento1 paginaLaundry & Home Care: Key Financials 1Catrinoiu PetreNessuna valutazione finora
- Erp and Mis Project - Thanks To PsoDocumento31 pagineErp and Mis Project - Thanks To PsoAkbar Syed100% (1)
- Ju Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperDocumento11 pagineJu Complete Face Recovery GAN Unsupervised Joint Face Rotation and De-Occlusion WACV 2022 PaperBiponjot KaurNessuna valutazione finora
- API MidtermDocumento4 pagineAPI MidtermsimranNessuna valutazione finora
- Group 4-Hospital Information System - His - QuizDocumento2 pagineGroup 4-Hospital Information System - His - QuizGeeyan Marlchest B NavarroNessuna valutazione finora
- An4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsDocumento74 pagineAn4856 Stevalisa172v2 2 KW Fully Digital Ac DC Power Supply Dsmps Evaluation Board StmicroelectronicsStefano SalaNessuna valutazione finora
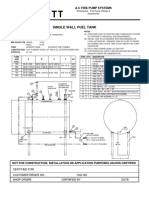
- Single Wall Fuel Tank: FP 2.7 A-C Fire Pump SystemsDocumento1 paginaSingle Wall Fuel Tank: FP 2.7 A-C Fire Pump Systemsricardo cardosoNessuna valutazione finora
- Benchmarking Guide OracleDocumento53 pagineBenchmarking Guide OracleTsion YehualaNessuna valutazione finora
- How To Make Money in The Stock MarketDocumento40 pagineHow To Make Money in The Stock Markettcb66050% (2)
- Pyrometallurgical Refining of Copper in An Anode Furnace: January 2005Documento13 paginePyrometallurgical Refining of Copper in An Anode Furnace: January 2005maxi roaNessuna valutazione finora
- John GokongweiDocumento14 pagineJohn GokongweiBela CraigNessuna valutazione finora
- Department Order No 05-92Documento3 pagineDepartment Order No 05-92NinaNessuna valutazione finora
- Compressive Strength Beam DesignDocumento70 pagineCompressive Strength Beam DesignDjuned0% (1)
- Micromaster 430: 7.5 KW - 250 KWDocumento118 pagineMicromaster 430: 7.5 KW - 250 KWAyman ElotaifyNessuna valutazione finora
- Continuation in Auditing OverviewDocumento21 pagineContinuation in Auditing OverviewJayNessuna valutazione finora
- Project The Ant Ranch Ponzi Scheme JDDocumento7 pagineProject The Ant Ranch Ponzi Scheme JDmorraz360Nessuna valutazione finora
- Lorilie Muring ResumeDocumento1 paginaLorilie Muring ResumeEzekiel Jake Del MundoNessuna valutazione finora
- ASME Y14.6-2001 (R2007), Screw Thread RepresentationDocumento27 pagineASME Y14.6-2001 (R2007), Screw Thread RepresentationDerekNessuna valutazione finora
- PNB - Recruitment For The Post of Chief Security OfficerDocumento3 paginePNB - Recruitment For The Post of Chief Security OfficerCareerNotifications.comNessuna valutazione finora
- Server LogDocumento5 pagineServer LogVlad CiubotariuNessuna valutazione finora
- Wind EnergyDocumento6 pagineWind Energyshadan ameenNessuna valutazione finora
- WELDING EQUIPMENT CALIBRATION STATUSDocumento4 pagineWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHNessuna valutazione finora
- Calc Fields Networking and Sharing: Welcome ToDocumento42 pagineCalc Fields Networking and Sharing: Welcome Toprashant adhikariNessuna valutazione finora
- Benzon CaseDocumento3 pagineBenzon Casejulieanne07100% (1)
- Variable Displacement Closed Circuit: Model 70160 Model 70360Documento56 pagineVariable Displacement Closed Circuit: Model 70160 Model 70360michael bossa alisteNessuna valutazione finora
- Cib DC22692Documento16 pagineCib DC22692Ashutosh SharmaNessuna valutazione finora
- Analytical DataDocumento176 pagineAnalytical DataAsep KusnaliNessuna valutazione finora
- Material Properties L2 Slides and NotesDocumento41 pagineMaterial Properties L2 Slides and NotesjohnNessuna valutazione finora