Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- MCU Based Multi Functions Automated Corn Planting RoverDocumento82 pagineMCU Based Multi Functions Automated Corn Planting Roveraldrinvic0005Nessuna valutazione finora
- Security MindsetDocumento3 pagineSecurity MindsetcykablyatNessuna valutazione finora
- Starwind V2V Converter: One Stop Virtualization ShopDocumento3 pagineStarwind V2V Converter: One Stop Virtualization ShopMehmet DemirNessuna valutazione finora
- IntroSoC Lab04Documento10 pagineIntroSoC Lab04Ngữ Đào DuyNessuna valutazione finora
- Verona Medical Group - DENT-X EVA 2010Documento4 pagineVerona Medical Group - DENT-X EVA 2010VeronaMedicalGroupYYNessuna valutazione finora
- Dnp3 Master Ethernet ManualDocumento143 pagineDnp3 Master Ethernet ManualunnikuttanNessuna valutazione finora
- 15 Causes of Project FailureDocumento3 pagine15 Causes of Project FailureEyuael Solomon100% (2)
- Motor Car (Construction, Equipment and Use) Regulations 1952Documento18 pagineMotor Car (Construction, Equipment and Use) Regulations 1952Tarek MohamedNessuna valutazione finora
- DHCP Presentation 01Documento20 pagineDHCP Presentation 01rhariharan_13Nessuna valutazione finora
- Characteristics of Digital DataDocumento6 pagineCharacteristics of Digital DataArdi DiraNessuna valutazione finora
- Ecommerce WebsiteDocumento14 pagineEcommerce WebsiteVipin Kumar100% (1)
- Kreutzer 42 Violin Studies or Caprices (Public Domain Sheet Music) PDFDocumento67 pagineKreutzer 42 Violin Studies or Caprices (Public Domain Sheet Music) PDFLee LohNessuna valutazione finora
- ABEn 145 - Tribunalo - Lab 4Documento14 pagineABEn 145 - Tribunalo - Lab 4Jaylou OpondaNessuna valutazione finora
- C++ FunctionsDocumento96 pagineC++ FunctionsDesadaNessuna valutazione finora
- 5 Turbine ProtectionDocumento14 pagine5 Turbine ProtectionSam100% (4)
- D75KXDocumento28 pagineD75KXDiego Duran MolinaNessuna valutazione finora
- Tution ProposalDocumento9 pagineTution ProposalUsman AliNessuna valutazione finora
- Neha 2020 TendinteDocumento16 pagineNeha 2020 TendinteIrina BesliuNessuna valutazione finora
- DIREÇÃO DEFENSIVA Selected Issues in Passenger Vehicle Tire SafetyDocumento75 pagineDIREÇÃO DEFENSIVA Selected Issues in Passenger Vehicle Tire SafetyCPSSTNessuna valutazione finora
- Ballou 01Documento25 pagineBallou 01rajuahmedt100% (1)
- Wireless LanDocumento7 pagineWireless Lanravi ramNessuna valutazione finora
- Doseuro Rapida Em01 Plus - ManualDocumento16 pagineDoseuro Rapida Em01 Plus - ManualDragisa DjukicNessuna valutazione finora
- Entrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipDocumento12 pagineEntrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipMylene CandidoNessuna valutazione finora
- Santhosh Java DevDocumento8 pagineSanthosh Java DevTajuddin ShaikNessuna valutazione finora
- Embedded Systems DiplomaDocumento9 pagineEmbedded Systems DiplomaKarim SamhyNessuna valutazione finora
- Laboratory Exercise Set 1 (Getting Started With Windows) Lab 1.1 Getting Started in Windows 7Documento29 pagineLaboratory Exercise Set 1 (Getting Started With Windows) Lab 1.1 Getting Started in Windows 7Kim dela TorreNessuna valutazione finora
- B10 Ignition System: To IndexDocumento7 pagineB10 Ignition System: To Indexwei fooNessuna valutazione finora
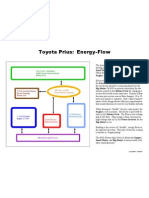
- Prius Energy FlowDocumento1 paginaPrius Energy Flowmsfz751Nessuna valutazione finora
- ING 112 2021 Fall Assessment II Suggested Key-DetailedDocumento4 pagineING 112 2021 Fall Assessment II Suggested Key-Detailedorhanlevent9Nessuna valutazione finora
- Gas Leakage Monitoring and Alerting SystemDocumento12 pagineGas Leakage Monitoring and Alerting SystemMEEHANessuna valutazione finora