Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Transportation Planning Arround Conservation Forest Area at Supiori As A New Expanding Regency at Biak IslandDocumento8 pagineTransportation Planning Arround Conservation Forest Area at Supiori As A New Expanding Regency at Biak IslandDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Report of Recruitment 2012Documento3 pagineReport of Recruitment 2012Dr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Reivision - Kalimantan River Transportation SustainabilityDocumento10 pagineReivision - Kalimantan River Transportation SustainabilityDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Highway MeteorologyDocumento216 pagineHighway MeteorologyaldokrenaNessuna valutazione finora
- Relatório SternDocumento613 pagineRelatório SternANDI Agencia de Noticias do Direito da Infancia100% (2)
- Interaksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDocumento1 paginaInteraksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Investigasi Dan Aplikasi Dalam Analisis Power Flow Pada Sistem Dinamik Non Linier - Marine Transport - Yang - JianDocumento1 paginaInvestigasi Dan Aplikasi Dalam Analisis Power Flow Pada Sistem Dinamik Non Linier - Marine Transport - Yang - JianDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Pavement Design Manual Jan 09Documento72 paginePavement Design Manual Jan 09Dr. Ir. R. Didin Kusdian, MT.100% (2)
- Interaksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDocumento1 paginaInteraksi Fluida-Struktur Pada Kapal Layar Balap Yacht - Marine Transport - Trimarch - DanieleiDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Disain Kapal Layar Balap Yach - Marine Transport - Scarponi - MatteoDocumento1 paginaDisain Kapal Layar Balap Yach - Marine Transport - Scarponi - MatteoDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Beban Impak Hydro Pada Struktur Kapal - Marine Transport - Lee - JuneDocumento1 paginaBeban Impak Hydro Pada Struktur Kapal - Marine Transport - Lee - JuneDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Composite Pavement Virginia Tech 09 Cr2Documento60 pagineComposite Pavement Virginia Tech 09 Cr2Dr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Presentation File 11 TH Qir University of Indonesia 2009 Transport Planning Arround Conservation Forest Area at SupioriDocumento31 paginePresentation File 11 TH Qir University of Indonesia 2009 Transport Planning Arround Conservation Forest Area at SupioriDr. Ir. R. Didin Kusdian, MT.Nessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Binary Logic Gates: Prepared By: NSZ FSG, Uitm PahangDocumento64 pagineBinary Logic Gates: Prepared By: NSZ FSG, Uitm PahangMuhammad Azizi100% (1)
- Course "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Documento38 pagineCourse "EEM 42 Three-Phase Asynchronous Machines: Dahlander Motors"Daus VillaNessuna valutazione finora
- 66kv Isolator Universal MakeDocumento13 pagine66kv Isolator Universal MakeRoshni GurungNessuna valutazione finora
- Service Manual Modulith SLX-F2 0109Documento476 pagineService Manual Modulith SLX-F2 0109Syed Mohtashim Yasin100% (1)
- Catalog LS - LVCBDocumento52 pagineCatalog LS - LVCBHa NguyenNessuna valutazione finora
- Rns Institute of Technology: Text BooksDocumento52 pagineRns Institute of Technology: Text Booksanu radhaNessuna valutazione finora
- BJT and MOSFET REVIEWDocumento43 pagineBJT and MOSFET REVIEWJamesNessuna valutazione finora
- DB 2G4WD-21DDocumento2 pagineDB 2G4WD-21DitsafakeaccountNessuna valutazione finora
- Process Control Engineering: Prof. Mahmoud A. El-Rifai Prof. Reem S. EttouneyDocumento37 pagineProcess Control Engineering: Prof. Mahmoud A. El-Rifai Prof. Reem S. EttouneyCupa no DensetsuNessuna valutazione finora
- Most Often Needed: Radio DiagramsDocumento191 pagineMost Often Needed: Radio DiagramsbrenodesenneNessuna valutazione finora
- Fitch - The-Superheterodyne-BookDocumento70 pagineFitch - The-Superheterodyne-BookmplennaNessuna valutazione finora
- Radar Systems - Delay Line CancellersDocumento7 pagineRadar Systems - Delay Line Cancellersgajjala rakeshNessuna valutazione finora
- Diagnostic Code List: Cerrar SISDocumento3 pagineDiagnostic Code List: Cerrar SISHamilton MirandaNessuna valutazione finora
- AES - AU0504 Course Plan For StudentsDocumento9 pagineAES - AU0504 Course Plan For StudentsbmdbmdbmdNessuna valutazione finora
- Matoshri College of Engineering and Research Center Nasik Department of Computer EngineeringDocumento18 pagineMatoshri College of Engineering and Research Center Nasik Department of Computer EngineeringAditya DarekarNessuna valutazione finora
- Ustares Research 2Documento15 pagineUstares Research 2Zachary Yassir GonzalezNessuna valutazione finora
- Voice and Data Communication Notes (Unit 1)Documento14 pagineVoice and Data Communication Notes (Unit 1)Roshan Ekka0% (2)
- lm00614 Onboard DC Grid Brochure - June2014 - 1 PDFDocumento8 paginelm00614 Onboard DC Grid Brochure - June2014 - 1 PDFStefanitaNessuna valutazione finora
- AC Series MotorsDocumento8 pagineAC Series Motorsゞ『HaiDerツ98〆Nessuna valutazione finora
- Ls 5912Documento2 pagineLs 5912Milorad RumenicNessuna valutazione finora
- Acti9 Ik60 - A9K27210 PDFDocumento2 pagineActi9 Ik60 - A9K27210 PDFThanh Luân HuỳnhNessuna valutazione finora
- IMS ManualDocumento66 pagineIMS Manualghafoorian_khoshgovar1488Nessuna valutazione finora
- Datasheet 98-8960-0 en 120V 60HzDocumento36 pagineDatasheet 98-8960-0 en 120V 60HzVanessa OggNessuna valutazione finora
- Semester Grade Sheet: Name Id No Semester YearDocumento1 paginaSemester Grade Sheet: Name Id No Semester YearHemantNessuna valutazione finora
- Service Manual: LCD TVDocumento73 pagineService Manual: LCD TVJose Luis Medina CastañedaNessuna valutazione finora
- S-CLASSIC E SeriesDocumento9 pagineS-CLASSIC E SeriesKetut Wahyu WidyanaNessuna valutazione finora
- Silcopac D: Hardware SOFTWARE Basic Version BDocumento2 pagineSilcopac D: Hardware SOFTWARE Basic Version BGerardo BaltaNessuna valutazione finora
- Calculating TheDocumento36 pagineCalculating TheshivvaramNessuna valutazione finora
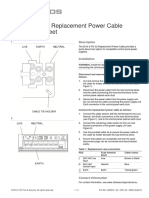
- 501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDocumento2 pagine501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDanNessuna valutazione finora
- Ov14d 777765Documento5 pagineOv14d 777765Sergio ReyesNessuna valutazione finora