Potrebbero piacerti anche
- 17-4658 LT-650Documento436 pagine17-4658 LT-650jose juanNessuna valutazione finora
- Informatica Interview QuestionsDocumento24 pagineInformatica Interview QuestionsSunil Reddy100% (3)
- Introduction To System ProgrammingDocumento50 pagineIntroduction To System ProgrammingSaurabh Iyer100% (1)
- Lorad M-III Mammography System Service Manual 9-500A-0029Documento178 pagineLorad M-III Mammography System Service Manual 9-500A-0029Tulio Moreira100% (4)
- DS Takeaway AttemptDocumento5 pagineDS Takeaway AttemptesmuraguNessuna valutazione finora
- Structured P2P Networks by Example Chord, DKS (N, K, F) : Jun QinDocumento11 pagineStructured P2P Networks by Example Chord, DKS (N, K, F) : Jun Qinsorin092004Nessuna valutazione finora
- UntitledDocumento3 pagineUntitledGopal KrishnaNessuna valutazione finora
- Ozsort 2.0: Sorting Up To 252Gb For A PennyDocumento19 pagineOzsort 2.0: Sorting Up To 252Gb For A Pennymanuelq9Nessuna valutazione finora
- TCS and InfosysDocumento5 pagineTCS and InfosysAmanpreet 2003052Nessuna valutazione finora
- Computer architectureANWRS2019Documento10 pagineComputer architectureANWRS2019KudakwasheNessuna valutazione finora
- Data Structures and OverviewDocumento13 pagineData Structures and Overviewsrinidhi1956Nessuna valutazione finora
- Linked ListsDocumento12 pagineLinked ListsmoviswaNessuna valutazione finora
- Lab 1Documento9 pagineLab 1Risinu WijesingheNessuna valutazione finora
- Ke LiuDocumento7 pagineKe LiuDeepak KrishnanNessuna valutazione finora
- Structured Programming CatDocumento5 pagineStructured Programming Catpaul muthuriNessuna valutazione finora
- Systemverilog UVM QADocumento9 pagineSystemverilog UVM QAAshwini PatilNessuna valutazione finora
- What Is A Function in C? What Is The Need of Using Functions?Documento5 pagineWhat Is A Function in C? What Is The Need of Using Functions?Yamihush MuthuKumarNessuna valutazione finora
- Final Worksheet On Data StructureDocumento7 pagineFinal Worksheet On Data StructureWiki EthiopiaNessuna valutazione finora
- Applies To:: Solaris Cluster How To Changing Cluster Interconnect IP Addresses (Doc ID 1012078.1)Documento3 pagineApplies To:: Solaris Cluster How To Changing Cluster Interconnect IP Addresses (Doc ID 1012078.1)cresmakNessuna valutazione finora
- Chord: A Scalable Peer-To-Peer Look-Up Protocol For Internet ApplicationsDocumento13 pagineChord: A Scalable Peer-To-Peer Look-Up Protocol For Internet ApplicationsNati ManNessuna valutazione finora
- Sehar Fatima DSADocumento21 pagineSehar Fatima DSASehar FatimaNessuna valutazione finora
- Mid Sem QP&SolutionDocumento7 pagineMid Sem QP&Solutionyadavsnair000Nessuna valutazione finora
- Skip ListDocumento23 pagineSkip Listtanyagoswami11Nessuna valutazione finora
- Deep Sort 2014Documento9 pagineDeep Sort 2014Arpit DesaiNessuna valutazione finora
- Data Structure QuestionDocumento16 pagineData Structure QuestionSakshi ChidarNessuna valutazione finora
- Array Vs Linked ListDocumento26 pagineArray Vs Linked Listbenzema nunu100% (1)
- Final Exam Ver2.9Documento6 pagineFinal Exam Ver2.9Blooddy MoonNessuna valutazione finora
- Linked Lists Lecture NotesDocumento12 pagineLinked Lists Lecture NotesJamilu AlhassanNessuna valutazione finora
- ELF Handling For Thread-Local Storage: 1 MotivationDocumento81 pagineELF Handling For Thread-Local Storage: 1 MotivationBugmenot05Nessuna valutazione finora
- Assign1 AnsDocumento31 pagineAssign1 AnsNavin Andrew Prince100% (1)
- Pitfall: 230 Chapter 5 / Linked ListsDocumento5 paginePitfall: 230 Chapter 5 / Linked ListsGroup BNessuna valutazione finora
- Nti C and Embedded C ContentsDocumento8 pagineNti C and Embedded C ContentsMohamed Youssif FaroukNessuna valutazione finora
- Advanced Programming With LCC - Win32Documento62 pagineAdvanced Programming With LCC - Win32Jeff Pratt100% (1)
- Short Papers: An Efficient and Regular Routing Methodology For Datapath Designs Using Net Regularity ExtractionDocumento9 pagineShort Papers: An Efficient and Regular Routing Methodology For Datapath Designs Using Net Regularity ExtractionSurya Ganesh PenagantiNessuna valutazione finora
- Assignment 3: Due Date: June 25, 2020, 11:55pm ISTDocumento6 pagineAssignment 3: Due Date: June 25, 2020, 11:55pm ISTiuvgzmznstddnmcqmnNessuna valutazione finora
- Dsa NotesDocumento45 pagineDsa Notesparthpathak2604Nessuna valutazione finora
- Syllabus and ManualCBCSDocumento64 pagineSyllabus and ManualCBCSPreethuraj RoyNessuna valutazione finora
- Data Structures-1Documento26 pagineData Structures-1Raja KushwahNessuna valutazione finora
- Comp VivaDocumento161 pagineComp VivaVenkata SivaramNessuna valutazione finora
- RPG Questions and SynonDocumento11 pagineRPG Questions and SynonVISHNU400100% (3)
- Chapter 12 Syntax Tree ConstructionDocumento39 pagineChapter 12 Syntax Tree ConstructionSohailNessuna valutazione finora
- Computer Generation of Streaming Sorting NetworksDocumento9 pagineComputer Generation of Streaming Sorting Networksdang2327Nessuna valutazione finora
- Lab 10Documento6 pagineLab 10shahzad nazirNessuna valutazione finora
- Branch and Bound Implementations For The Traveling Salesperson ProblemDocumento12 pagineBranch and Bound Implementations For The Traveling Salesperson ProblemWashington ChenNessuna valutazione finora
- Atomic Smart Pointers: Half Thread-SafeDocumento4 pagineAtomic Smart Pointers: Half Thread-SafeSK_shivamNessuna valutazione finora
- C Interview QuestionsDocumento31 pagineC Interview QuestionsChandraShekarNessuna valutazione finora
- As 400 Interview QuestionDocumento48 pagineAs 400 Interview QuestionpokirishivaaaNessuna valutazione finora
- Unit-Iii: Linked Lists: Free (PTR)Documento32 pagineUnit-Iii: Linked Lists: Free (PTR)satishNessuna valutazione finora
- Linked List in Data StructureDocumento58 pagineLinked List in Data StructureNahid HasanNessuna valutazione finora
- ADD Find Unsorted Array Sorted Array Linked ListDocumento27 pagineADD Find Unsorted Array Sorted Array Linked ListRam GuggulNessuna valutazione finora
- COE 205 Lab Manual Lab 3: Defining Data and Symbolic Constants - Page 25Documento11 pagineCOE 205 Lab Manual Lab 3: Defining Data and Symbolic Constants - Page 25darwinvargas2011Nessuna valutazione finora
- Lect 7Documento10 pagineLect 7api-3705606Nessuna valutazione finora
- What's New in Python: A. M. KuchlingDocumento33 pagineWhat's New in Python: A. M. KuchlingFlutur RalucaNessuna valutazione finora
- DS TheoryDocumento7 pagineDS TheorywarikadwaitNessuna valutazione finora
- Cracking Unix Passwords Using FPGA PlatformsDocumento9 pagineCracking Unix Passwords Using FPGA PlatformsAhmed HamoudaNessuna valutazione finora
- Most Repeated Questions With AnswersDocumento8 pagineMost Repeated Questions With AnswersDeepak Simhadri100% (1)
- 2023 Contoh Soalan Computer Architecture and OrganizationDocumento7 pagine2023 Contoh Soalan Computer Architecture and OrganizationHarith HiewNessuna valutazione finora
- 2 Marks Q&A, 16 Mark Q - NPMDocumento25 pagine2 Marks Q&A, 16 Mark Q - NPMearth2hellothereNessuna valutazione finora
- Modern Introduction to Object Oriented Programming for Prospective DevelopersDa EverandModern Introduction to Object Oriented Programming for Prospective DevelopersNessuna valutazione finora
- ADVANCED DATA STRUCTURES FOR ALGORITHMS: Mastering Complex Data Structures for Algorithmic Problem-Solving (2024)Da EverandADVANCED DATA STRUCTURES FOR ALGORITHMS: Mastering Complex Data Structures for Algorithmic Problem-Solving (2024)Nessuna valutazione finora
- C# Package Mastery: 100 Essentials in 1 Hour - 2024 EditionDa EverandC# Package Mastery: 100 Essentials in 1 Hour - 2024 EditionNessuna valutazione finora
- Full Analyse of JULIADocumento19 pagineFull Analyse of JULIArenan55026Nessuna valutazione finora
- 200T 5 Pal 001 PDFDocumento27 pagine200T 5 Pal 001 PDFCornelius Price100% (1)
- Printer UP DF550Documento2 paginePrinter UP DF550Anonymous ZI4787Nessuna valutazione finora
- Machine Tools Cutting FluidsDocumento133 pagineMachine Tools Cutting FluidsDamodara MadhukarNessuna valutazione finora
- QUALICOAT Specifications 16th Edition Updated VersionDocumento86 pagineQUALICOAT Specifications 16th Edition Updated VersionСтанислав ПодольскийNessuna valutazione finora
- Definitions of Physical QuantitiesDocumento41 pagineDefinitions of Physical QuantitiesAnonymous QiMB2lBCJLNessuna valutazione finora
- Project Report On Edible Oil Packaging Machinery: Indian Institute of Packaging, KolkataDocumento36 pagineProject Report On Edible Oil Packaging Machinery: Indian Institute of Packaging, KolkataHemlata nagNessuna valutazione finora
- Buckling Considerations in Pile Design: October 2005Documento9 pagineBuckling Considerations in Pile Design: October 2005shashank sharmaNessuna valutazione finora
- Sika MonoTop 615 PDS (CE)Documento6 pagineSika MonoTop 615 PDS (CE)Virah Sammy ChandraNessuna valutazione finora
- Chandrayan 2Documento11 pagineChandrayan 2SELVALAKSHMI S VNessuna valutazione finora
- B968B968M 10 Standard Test MethodDocumento2 pagineB968B968M 10 Standard Test Methodmarjan banooNessuna valutazione finora
- BVA Cylinder Accessories CatalogDocumento1 paginaBVA Cylinder Accessories CatalogTitanplyNessuna valutazione finora
- @ RhinoDocumento29 pagine@ RhinoHimanshu PatelNessuna valutazione finora
- Breakwater Vertical BarriersDocumento10 pagineBreakwater Vertical BarriersAlbert PranataNessuna valutazione finora
- Tate Airflow Tate Airflow Isoflospec3Documento2 pagineTate Airflow Tate Airflow Isoflospec3oscarbogadoNessuna valutazione finora
- Sonali MondalDocumento2 pagineSonali MondalSonali MondalNessuna valutazione finora
- AnalysisofUnder reamedPilesSubjectedtoDifferentTypesofLoadinClayeySoil 1 8 PDFDocumento9 pagineAnalysisofUnder reamedPilesSubjectedtoDifferentTypesofLoadinClayeySoil 1 8 PDFAkhilesh Kumar SinghNessuna valutazione finora
- Digital Optical PyrometerDocumento1 paginaDigital Optical Pyrometerlehdruk7100Nessuna valutazione finora
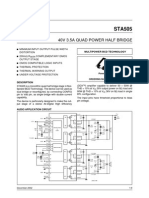
- STA505Documento10 pagineSTA505kizonzNessuna valutazione finora
- VGP - Book1Documento94 pagineVGP - Book1Chirag DesaiNessuna valutazione finora
- MS301L11 Navigational Methods and Route Planning LADocumento3 pagineMS301L11 Navigational Methods and Route Planning LASam HollidayNessuna valutazione finora
- Risk Assesment-Rebar Loading & UnloadingDocumento1 paginaRisk Assesment-Rebar Loading & Unloadingmainraj rajNessuna valutazione finora
- hsg47 - Avoiding Danger From Underground Services PDFDocumento40 paginehsg47 - Avoiding Danger From Underground Services PDFAchilleas21Nessuna valutazione finora
- Job Application and Cover LettersDocumento1 paginaJob Application and Cover LettersDyah AgNessuna valutazione finora
- Understanding The Harmony Information in The Preset DisplayDocumento2 pagineUnderstanding The Harmony Information in The Preset DisplaymileroNessuna valutazione finora
- Elegant InteriorsDocumento38 pagineElegant Interiorsalka dsouzaNessuna valutazione finora
- Platespin User GuideDocumento17 paginePlatespin User GuideEbitomo Anthony TobiNessuna valutazione finora
- VentureDeckingInstallationInstructions LRDocumento13 pagineVentureDeckingInstallationInstructions LRGhislainTremblayNessuna valutazione finora