Potrebbero piacerti anche
- Controlling Emergency Vehicles in Urban Traffic With Genetic AlgorithmsDocumento6 pagineControlling Emergency Vehicles in Urban Traffic With Genetic AlgorithmsIulian LitaNessuna valutazione finora
- Inter-Vehicular Communication Using Packet Network TheoryDocumento7 pagineInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNessuna valutazione finora
- Intelligent Traffic Light Control System Based Image Intensity MeasurementDocumento7 pagineIntelligent Traffic Light Control System Based Image Intensity MeasurementChouaib SaciNessuna valutazione finora
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocumento10 paginePressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007Nessuna valutazione finora
- Autonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control ApproachDocumento16 pagineAutonomous Vehicle Platoons in Urban Road Networks A Joint Distributed Reinforcement Learning and Model Predictive Control Approachthanhtan_tvuNessuna valutazione finora
- Automated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssDocumento31 pagineAutomated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssMuhammad HassnainNessuna valutazione finora
- ITS - SurveyDocumento34 pagineITS - SurveyAshish AroraNessuna valutazione finora
- Fuzzy LogicDocumento51 pagineFuzzy LogicVinay KumarNessuna valutazione finora
- Simulation of Intelligent Traffic Control For Autonomous VehiclesDocumento7 pagineSimulation of Intelligent Traffic Control For Autonomous Vehiclessivaharish.sc.2017.mechNessuna valutazione finora
- Automated Transport SystemsDocumento3 pagineAutomated Transport SystemsPedro José SuárezNessuna valutazione finora
- Analyzing On-Demand Mobility Services by Agent-Based SimulationDocumento10 pagineAnalyzing On-Demand Mobility Services by Agent-Based SimulationJohan AmayaNessuna valutazione finora
- Integrated Longitudinal and Lateral Networked ContDocumento25 pagineIntegrated Longitudinal and Lateral Networked ContJasNessuna valutazione finora
- IJCAI TransportationDocumento5 pagineIJCAI TransportationAhmed WadeNessuna valutazione finora
- Dynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesDocumento11 pagineDynamic Traffic Light Control System Based On Process Synchronization Among Connected VehiclesJulina Jerez AbadiesNessuna valutazione finora
- Connected Vehicles ADocumento16 pagineConnected Vehicles AEl Mehdi BargamNessuna valutazione finora
- Vehicles A-Avec CompressionDocumento16 pagineVehicles A-Avec CompressionEl Mehdi BargamNessuna valutazione finora
- A Hybrid Method For Automatic Traffic Control MechanismDocumento8 pagineA Hybrid Method For Automatic Traffic Control MechanismIntegrated Intelligent ResearchNessuna valutazione finora
- Proximal Policy Optimization Through A Deep ReinfoDocumento19 pagineProximal Policy Optimization Through A Deep ReinfoRed AlexNessuna valutazione finora
- Explicat Funct SemafDocumento8 pagineExplicat Funct SemafSimona NicoletaNessuna valutazione finora
- Dynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsDocumento12 pagineDynamic Resource Reservation Based Collision and Deadlock Prevention For Multi-AGVsIchiware StoreNessuna valutazione finora
- Adaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent SystemDocumento14 pagineAdaptive Priority Based Scheduling Algorithm For Intelligent Traffic Control in Urban Cities Using Multi Agent Systemion cioriciNessuna valutazione finora
- 07973864Documento8 pagine07973864Hossam AnanyNessuna valutazione finora
- 190 911 1 PB PDFDocumento9 pagine190 911 1 PB PDFPutri CatolinNessuna valutazione finora
- A Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam MahmoodiDocumento6 pagineA Lane Merge Coordination Model For A V2X Scenario: Luis Sequeira, Adam Szefer, Jamie Slome and Toktam Mahmoodiمصعب جاسمNessuna valutazione finora
- ECMR - Review of IVDC Architectures - KISSAIDocumento9 pagineECMR - Review of IVDC Architectures - KISSAIAmanuelAlemaNessuna valutazione finora
- 190 460 1 PBDocumento9 pagine190 460 1 PBAndra LuisNessuna valutazione finora
- Rebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachDocumento7 pagineRebalancing Shared Mobility-On-Demand Systems: A Reinforcement Learning ApproachSayani MandalNessuna valutazione finora
- TLC Using VHDLDocumento30 pagineTLC Using VHDLnaren_cool05Nessuna valutazione finora
- ACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous VehiclesDocumento12 pagineACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous Vehiclesthanhtan_tvuNessuna valutazione finora
- A Vision-Based Approach To Collision Prediction at Traffic IntersectionsDocumento8 pagineA Vision-Based Approach To Collision Prediction at Traffic IntersectionsnamcozenginNessuna valutazione finora
- Citation Distributed MPC For Multi-Vehicle Systems Moving in FormationDocumento12 pagineCitation Distributed MPC For Multi-Vehicle Systems Moving in FormationTony Y.Nessuna valutazione finora
- SumoDocumento18 pagineSumoahmetahmetNessuna valutazione finora
- Traffic SimultaionDocumento12 pagineTraffic SimultaionYessyNessuna valutazione finora
- Sampling Space-Semi AutoDocumento16 pagineSampling Space-Semi AutoyaslouNessuna valutazione finora
- Development of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentDocumento16 pagineDevelopment of A Signal-Free Intersection Control System For CAVs and Corridor Level Impact AssessmentChristian Kyle BeltranNessuna valutazione finora
- Coordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperDocumento9 pagineCoordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperPasinduNessuna valutazione finora
- Traffic Lights Time Strategy For T-Junctions of Toll Road GateDocumento10 pagineTraffic Lights Time Strategy For T-Junctions of Toll Road GateIAES International Journal of Robotics and AutomationNessuna valutazione finora
- Smart Traffic Management Using Deep LearningDocumento3 pagineSmart Traffic Management Using Deep LearningInternational Journal of Innovative Science and Research TechnologyNessuna valutazione finora
- 42 Firb (EWGT2006)Documento15 pagine42 Firb (EWGT2006)guido gentileNessuna valutazione finora
- Automated Highways System2Documento5 pagineAutomated Highways System2Shubham MohiteNessuna valutazione finora
- FailsafeDocumento17 pagineFailsafePrachit GuptaNessuna valutazione finora
- Safety in Semi-Autonomous Multi-Vehicle Systems: A Hybrid Control ApproachDocumento8 pagineSafety in Semi-Autonomous Multi-Vehicle Systems: A Hybrid Control ApproachKai GustavNessuna valutazione finora
- Artificial Intelligencebased Realtime Traffic ManagementDocumento6 pagineArtificial Intelligencebased Realtime Traffic Managementnishmitharodrigues02Nessuna valutazione finora
- Smart Intersection Design For Traffic Pedestrian ADocumento7 pagineSmart Intersection Design For Traffic Pedestrian AVi'ren BoharaNessuna valutazione finora
- Applied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceDocumento14 pagineApplied Sciences: Deep Learning System For Vehicular Re-Routing and Congestion AvoidanceJuan VillacísNessuna valutazione finora
- Sensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversDocumento19 pagineSensors: A Hybrid Planning Approach Based On MPC and Parametric Curves For Overtaking ManeuversrayNessuna valutazione finora
- Research Article: Estimating The Potential Modal Split of Any Future Mode Using Revealed Preference DataDocumento11 pagineResearch Article: Estimating The Potential Modal Split of Any Future Mode Using Revealed Preference DataAmul ShresthaNessuna valutazione finora
- Systematic ReviewDocumento24 pagineSystematic ReviewMOHAMMAD ABU KHALIFANessuna valutazione finora
- Heuristic Autonomous Intersection ManagementDocumento9 pagineHeuristic Autonomous Intersection ManagementAditya Prakash ChouhanNessuna valutazione finora
- A Hybrid Method For Automatic Traffic Control MechanismDocumento7 pagineA Hybrid Method For Automatic Traffic Control MechanismiirNessuna valutazione finora
- EC1-dynamic Traffic Light Control SystemDocumento12 pagineEC1-dynamic Traffic Light Control SystemUsnish MajumdarNessuna valutazione finora
- Optimization-Based Collision AvoidanceDocumento27 pagineOptimization-Based Collision AvoidanceAlejandro Sans JiménezNessuna valutazione finora
- A Dynamic Trajectory Planning MethodDocumento17 pagineA Dynamic Trajectory Planning Methodgo.thanachotstNessuna valutazione finora
- Moving Block&Traffic ManagementDocumento10 pagineMoving Block&Traffic ManagementVIPIN DOBHALNessuna valutazione finora
- 1 s2.0 S0743731522000636 MainDocumento14 pagine1 s2.0 S0743731522000636 MainVinniNessuna valutazione finora
- Technical Report 02-04 Peer-to-Peer Cooperative DrivingDocumento14 pagineTechnical Report 02-04 Peer-to-Peer Cooperative Drivingmnoman3482Nessuna valutazione finora
- Aisr ReportDocumento24 pagineAisr ReportVinay ArniNessuna valutazione finora
- Indecs2020 pp369 374Documento6 pagineIndecs2020 pp369 374Dániel TokodyNessuna valutazione finora
- Athipathy Traffic ManagementDocumento7 pagineAthipathy Traffic ManagementathipathyNessuna valutazione finora
- Final Spring-2019 Invigilation PlanDocumento8 pagineFinal Spring-2019 Invigilation PlanMuhammad AzamNessuna valutazione finora
- Machin Learning GE404 Topic 1 Introduction EMDocumento27 pagineMachin Learning GE404 Topic 1 Introduction EMMuhammad AzamNessuna valutazione finora
- ReportTransaction - Returned or Cancelled Orders 15 Feb 2018 - 28 Feb 2018 - 2018-02!21!225434Documento2 pagineReportTransaction - Returned or Cancelled Orders 15 Feb 2018 - 28 Feb 2018 - 2018-02!21!225434Muhammad AzamNessuna valutazione finora
- MITOCW - Ocw-18-01-F07-Lec01 - 300k: ProfessorDocumento11 pagineMITOCW - Ocw-18-01-F07-Lec01 - 300k: ProfessorMuhammad AzamNessuna valutazione finora
- HITECProspectusFinal2017 18Documento192 pagineHITECProspectusFinal2017 18Muhammad AzamNessuna valutazione finora
- Fasll 16 Time Table 2016Documento2 pagineFasll 16 Time Table 2016Muhammad AzamNessuna valutazione finora
- HBL CarLoan Calculator (HBLCL75)Documento13 pagineHBL CarLoan Calculator (HBLCL75)Muhammad AzamNessuna valutazione finora
- MGT601 FormulasDocumento8 pagineMGT601 FormulasMuhammad AzamNessuna valutazione finora
- Bolin-2014-Journal of Educational MeasurementDocumento3 pagineBolin-2014-Journal of Educational MeasurementMuhammad AzamNessuna valutazione finora
- Solution Types F 2Documento1 paginaSolution Types F 2Muhammad AzamNessuna valutazione finora
- 1 GDB MGT 601 Question: Explain The Concept of Mutually Exclusive Events? AnsDocumento1 pagina1 GDB MGT 601 Question: Explain The Concept of Mutually Exclusive Events? AnsMuhammad AzamNessuna valutazione finora
- Prm700 Prm700 Assignment 02Documento3 paginePrm700 Prm700 Assignment 02Muhammad AzamNessuna valutazione finora
- Statistical Inference - (MGT601) Mid FA2015Documento61 pagineStatistical Inference - (MGT601) Mid FA2015Muhammad Azam0% (1)
- Joint Admission Control, Mode Selection and Power Allocation in D2D Communication SystemsDocumento12 pagineJoint Admission Control, Mode Selection and Power Allocation in D2D Communication SystemsMuhammad AzamNessuna valutazione finora
- Employees' Pension Scheme, 1995: Form No. 10 C (E.P.S)Documento4 pagineEmployees' Pension Scheme, 1995: Form No. 10 C (E.P.S)nasir ahmedNessuna valutazione finora
- Fedex Service Guide: Everything You Need To Know Is OnlineDocumento152 pagineFedex Service Guide: Everything You Need To Know Is OnlineAlex RuizNessuna valutazione finora
- Unit-5 Shell ProgrammingDocumento11 pagineUnit-5 Shell ProgrammingLinda BrownNessuna valutazione finora
- CoDocumento80 pagineCogdayanand4uNessuna valutazione finora
- Hager Pricelist May 2014Documento64 pagineHager Pricelist May 2014rajinipre-1Nessuna valutazione finora
- Cryo EnginesDocumento6 pagineCryo EnginesgdoninaNessuna valutazione finora
- 5 Star Hotels in Portugal Leads 1Documento9 pagine5 Star Hotels in Portugal Leads 1Zahed IqbalNessuna valutazione finora
- (X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Documento9 pagine(X-09485) XYLENE RECTIFIED Extra Pure (Mix Isomers)Bharath KumarNessuna valutazione finora
- Heavy LiftDocumento4 pagineHeavy Liftmaersk01Nessuna valutazione finora
- P 1 0000 06 (2000) - EngDocumento34 pagineP 1 0000 06 (2000) - EngTomas CruzNessuna valutazione finora
- Zelio Control RM35UA13MWDocumento3 pagineZelio Control RM35UA13MWSerban NicolaeNessuna valutazione finora
- 48 Volt Battery ChargerDocumento5 pagine48 Volt Battery ChargerpradeeepgargNessuna valutazione finora
- GR L-38338Documento3 pagineGR L-38338James PerezNessuna valutazione finora
- Ikea AnalysisDocumento33 pagineIkea AnalysisVinod BridglalsinghNessuna valutazione finora
- M J 1 MergedDocumento269 pagineM J 1 MergedsanyaNessuna valutazione finora
- Are Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceDocumento6 pagineAre Groups and Teams The Same Thing? An Evaluation From The Point of Organizational PerformanceNely Noer SofwatiNessuna valutazione finora
- Introduction To Motor DrivesDocumento24 pagineIntroduction To Motor Drivessukhbat sodnomdorjNessuna valutazione finora
- Daraman vs. DENRDocumento2 pagineDaraman vs. DENRJeng GacalNessuna valutazione finora
- The Electricity Act - 2003Documento84 pagineThe Electricity Act - 2003Anshul PandeyNessuna valutazione finora
- Seminar On Despute Resolution & IPR Protection in PRCDocumento4 pagineSeminar On Despute Resolution & IPR Protection in PRCrishi000071985100% (2)
- Computer First Term Q1 Fill in The Blanks by Choosing The Correct Options (10x1 10)Documento5 pagineComputer First Term Q1 Fill in The Blanks by Choosing The Correct Options (10x1 10)Tanya HemnaniNessuna valutazione finora
- MSDS - Tuff-Krete HD - Part DDocumento6 pagineMSDS - Tuff-Krete HD - Part DAl GuinitaranNessuna valutazione finora
- The Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageDocumento5 pagineThe Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageHenny ZahranyNessuna valutazione finora
- Edita's Opertionalization StrategyDocumento13 pagineEdita's Opertionalization StrategyMaryNessuna valutazione finora
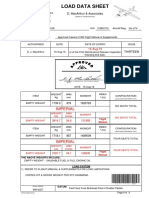
- Load Data Sheet: ImperialDocumento3 pagineLoad Data Sheet: ImperialLaurean Cub BlankNessuna valutazione finora
- Expectation Vs Reality: Job Order and Contract of ServiceDocumento10 pagineExpectation Vs Reality: Job Order and Contract of ServiceMikee Louise MirasolNessuna valutazione finora
- Internship ReportDocumento46 pagineInternship ReportBilal Ahmad100% (1)
- General Field Definitions PlusDocumento9 pagineGeneral Field Definitions PlusOscar Alberto ZambranoNessuna valutazione finora
- Applied-Entrepreneurship PPTDocumento65 pagineApplied-Entrepreneurship PPTJanice EscañoNessuna valutazione finora
- PeopleSoft Application Engine Program PDFDocumento17 paginePeopleSoft Application Engine Program PDFSaurabh MehtaNessuna valutazione finora