Potrebbero piacerti anche
- 10 Viscoelasticity 03 RheologicalDocumento13 pagine10 Viscoelasticity 03 RheologicalAvinash KawaleNessuna valutazione finora
- Rheological Models Explained in 10.3 SectionDocumento10 pagineRheological Models Explained in 10.3 SectionJuan Pablo EspinosaNessuna valutazione finora
- 10 Viscoelasticity 03 RheologicalDocumento13 pagine10 Viscoelasticity 03 RheologicalSaif LlNessuna valutazione finora
- Viscoelastic Behavior of Polymers PDFDocumento9 pagineViscoelastic Behavior of Polymers PDFchiuchan888Nessuna valutazione finora
- Chap. 6 MSMBM Design Sem IDocumento95 pagineChap. 6 MSMBM Design Sem IPrafulla PatilNessuna valutazione finora
- Rheological ModelsDocumento14 pagineRheological ModelsCHEENIE MAE SAGUNNessuna valutazione finora
- Viscoelastic hereditary integralsDocumento12 pagineViscoelastic hereditary integralsletter_ashish4444Nessuna valutazione finora
- ViscoelasticityDocumento11 pagineViscoelasticitymchilwesaNessuna valutazione finora
- Tschoegl1989 Chapter EnergyStorageAndDissipationInADocumento46 pagineTschoegl1989 Chapter EnergyStorageAndDissipationInAchopin.wlive.cnNessuna valutazione finora
- Dynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural DynamicsDocumento11 pagineDynamics of Structures and Soils: Deterministic Structural Dynamics. Random Stochastic or Random Structural Dynamicspanos2244662864Nessuna valutazione finora
- 15 ViscoelasticityDocumento30 pagine15 ViscoelasticityaderancNessuna valutazione finora
- Lecture 20Documento14 pagineLecture 20Martha Isabel SernaNessuna valutazione finora
- Tensors, Stress, Strain, ElasticityDocumento10 pagineTensors, Stress, Strain, ElasticitySiti Cweety MarryNessuna valutazione finora
- Theories of Elastic FailureDocumento15 pagineTheories of Elastic FailurejaishowNessuna valutazione finora
- CH 10Documento36 pagineCH 10LeonardoMadeira11100% (1)
- Maxwell ModelDocumento20 pagineMaxwell ModelJasleen Kaur HoraNessuna valutazione finora
- Eyring Equation PDFDocumento7 pagineEyring Equation PDFRana AnasNessuna valutazione finora
- Hysteretic Damping and ModelsDocumento12 pagineHysteretic Damping and ModelsnoussnoussaNessuna valutazione finora
- Creep DescriptionDocumento11 pagineCreep DescriptionGerry AnandaNessuna valutazione finora
- Drying Creep of Concrete in Terms of Age-Adjusted Effective Modulus MethodDocumento12 pagineDrying Creep of Concrete in Terms of Age-Adjusted Effective Modulus MethodDaniela Mihaiela BocaNessuna valutazione finora
- Generalized Maxwell ModelDocumento10 pagineGeneralized Maxwell Modelsalkan_rahmanovic810Nessuna valutazione finora
- Mechanics of Solids (MET-251) Columns & Struts notes (40Documento17 pagineMechanics of Solids (MET-251) Columns & Struts notes (40Gurpreet SinghNessuna valutazione finora
- Deformation, Stress, and Conservation Laws: I U U XDocumento31 pagineDeformation, Stress, and Conservation Laws: I U U XFelipe Carrasco DuránNessuna valutazione finora
- Articulo - Pendulo SimpleDocumento10 pagineArticulo - Pendulo SimpleeulalioaguilarNessuna valutazione finora
- Introducton To ThermodynamicsDocumento7 pagineIntroducton To Thermodynamicsdesi_parisNessuna valutazione finora
- Viscoelasticity: ReferencesDocumento21 pagineViscoelasticity: Referencesletter_ashish4444Nessuna valutazione finora
- Tensor Transformation FormulaeDocumento5 pagineTensor Transformation FormulaeAryce_Nessuna valutazione finora
- Experiment # 1: ObjectiveDocumento5 pagineExperiment # 1: ObjectiveHurair Tariq FOE-PermanentNessuna valutazione finora
- Stability of StructuresDocumento83 pagineStability of StructuresmchilwesaNessuna valutazione finora
- Elastic Stability of ColumnsDocumento11 pagineElastic Stability of ColumnsSayantan GhosalNessuna valutazione finora
- Polymer Mass: Principles of Product DesignDocumento27 paginePolymer Mass: Principles of Product DesignOladimeji AlabiNessuna valutazione finora
- Beam DeflectionDocumento14 pagineBeam DeflectionPrudvi Krishna MaladiNessuna valutazione finora
- Free Vibration of ParticlesDocumento19 pagineFree Vibration of ParticlesDavid AmachreeNessuna valutazione finora
- TP N°2 - Extracto CEB-FIP Model Code 1990Documento6 pagineTP N°2 - Extracto CEB-FIP Model Code 1990rlorefice6559Nessuna valutazione finora
- Sujets Physique SIS09 enDocumento6 pagineSujets Physique SIS09 enKlevis KasoNessuna valutazione finora
- 34 3 RSTD MotnDocumento9 pagine34 3 RSTD MotnEbookcrazeNessuna valutazione finora
- s11043-010-9122-9Documento11 pagines11043-010-9122-9Nam Huu TranNessuna valutazione finora
- Reference BooksDocumento23 pagineReference BooksIgor Gabriel Teixeira GómezNessuna valutazione finora
- CH10Documento39 pagineCH10Ajay Kumar SreeramaNessuna valutazione finora
- Couette FlowDocumento5 pagineCouette Flowphutd09100% (1)
- The Wave EquationDocumento34 pagineThe Wave EquationStephanie HaynesNessuna valutazione finora
- Chapter 8. Entropy: P P M ADocumento6 pagineChapter 8. Entropy: P P M AmarzinusNessuna valutazione finora
- Mechanics 3 Revision NotesDocumento45 pagineMechanics 3 Revision NotesDexter FungNessuna valutazione finora
- MIT2 080JF13 Lecture10Documento16 pagineMIT2 080JF13 Lecture10LeonardoMadeira11Nessuna valutazione finora
- M Aterial Subjected To Combine D Direct and Shear StressesDocumento4 pagineM Aterial Subjected To Combine D Direct and Shear Stressespmm05479Nessuna valutazione finora
- Design of Diagonal Cross Bracings - Part 1 Theoretical Study PDFDocumento5 pagineDesign of Diagonal Cross Bracings - Part 1 Theoretical Study PDFaapennsylvaniaNessuna valutazione finora
- Creep Behavior and Stress Relaxation Models for Advanced Mechanics of SolidsDocumento28 pagineCreep Behavior and Stress Relaxation Models for Advanced Mechanics of SolidsAbdul RahimNessuna valutazione finora
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDocumento8 pagine5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyNessuna valutazione finora
- Mathematical modelling of skydivingDocumento14 pagineMathematical modelling of skydivingvarun varma100% (1)
- Subject: Arch315-Strength of MaterialsDocumento15 pagineSubject: Arch315-Strength of MaterialsAlyssa MadelNessuna valutazione finora
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorDocumento10 pagineNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08Nessuna valutazione finora
- Applications of Second ODEDocumento24 pagineApplications of Second ODEMuhammad Zariff 'Izzat Mohd Faudzi100% (1)
- Townsend, Quantum Physics, CHAP - 3, Schodinger EqDocumento24 pagineTownsend, Quantum Physics, CHAP - 3, Schodinger EqElcan DiogenesNessuna valutazione finora
- Beams and Framed Structures: Structures and Solid Body MechanicsDa EverandBeams and Framed Structures: Structures and Solid Body MechanicsValutazione: 3 su 5 stelle3/5 (2)
- Heat: The Nature of Temperature and Most Other PhysicsDa EverandHeat: The Nature of Temperature and Most Other PhysicsNessuna valutazione finora
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsDa EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNessuna valutazione finora
- A Complete Course in Physics ( Graphs ) - First EditionDa EverandA Complete Course in Physics ( Graphs ) - First EditionNessuna valutazione finora
- Desmorat R Damage and FatigueDocumento95 pagineDesmorat R Damage and FatiguesaltyNessuna valutazione finora
- Energy Conversion and Management: Mohamed Lachheb, Mustapha Karkri, Fethi Albouchi, Foued Mzali, Sassi Ben NasrallahDocumento9 pagineEnergy Conversion and Management: Mohamed Lachheb, Mustapha Karkri, Fethi Albouchi, Foued Mzali, Sassi Ben NasrallahsaltyNessuna valutazione finora
- Applied Mathematical Modelling: X.T. Xiong, W.X. Shi, Y.C. HonDocumento15 pagineApplied Mathematical Modelling: X.T. Xiong, W.X. Shi, Y.C. HonsaltyNessuna valutazione finora
- Analysis of a cantilever beam with ABAQUSDocumento15 pagineAnalysis of a cantilever beam with ABAQUSsaltyNessuna valutazione finora
- Final ProjDocumento18 pagineFinal ProjsaltyNessuna valutazione finora
- JKR 2012 SITE INVESTIGATION SCHEDULE OF RATESDocumento0 pagineJKR 2012 SITE INVESTIGATION SCHEDULE OF RATESAjoy Zulfadhli0% (1)
- St. Mary's College Sta. Maria Ilocos Sur Inc.: ..Goodluck and GodblessDocumento6 pagineSt. Mary's College Sta. Maria Ilocos Sur Inc.: ..Goodluck and GodblessUrsula Sison Reyes DolorNessuna valutazione finora
- High-Performance Cold Work Tool Steel K110Documento2 pagineHigh-Performance Cold Work Tool Steel K110Greg SanjayaNessuna valutazione finora
- Geyser Mounting Horizontal Vs VerticalDocumento1 paginaGeyser Mounting Horizontal Vs VerticalRussell Collett0% (1)
- Computational Fluid Dynamics Simulation of The Progress of Fire Smoke in Large Space, Building AtriaDocumento7 pagineComputational Fluid Dynamics Simulation of The Progress of Fire Smoke in Large Space, Building AtriaAravind KumarNessuna valutazione finora
- Bernt - EC3 1 5Documento44 pagineBernt - EC3 1 5Rosario BlancaNessuna valutazione finora
- Singapore National Annexure To Eurocode 8 PDFDocumento21 pagineSingapore National Annexure To Eurocode 8 PDFPankaj MunjalNessuna valutazione finora
- Advanced Fluid MechanicsDocumento154 pagineAdvanced Fluid MechanicsMohammad irfanNessuna valutazione finora
- Torsion of A Circular Cylinder - f06 - RevisedDocumento24 pagineTorsion of A Circular Cylinder - f06 - RevisedCrystal WoodwardNessuna valutazione finora
- Offer Legrand SandwichBBT BMTC EV 02.04.2022Documento1 paginaOffer Legrand SandwichBBT BMTC EV 02.04.2022Darshit VyasNessuna valutazione finora
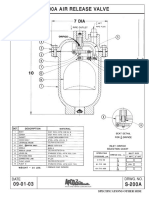
- APCO. S-200a Air Release ValveDocumento2 pagineAPCO. S-200a Air Release ValveAlberto Diaz100% (2)
- HVAC Systems Duct DesignDocumento39 pagineHVAC Systems Duct Designsardarmkhan100% (2)
- 5.01 Cold Water Plumbing Cold Water Pipe Sizing Testing and Commissioning PDFDocumento4 pagine5.01 Cold Water Plumbing Cold Water Pipe Sizing Testing and Commissioning PDFrhomadonaNessuna valutazione finora
- AWS90 Structural Nonlin Ch02 NonlinearDocumento94 pagineAWS90 Structural Nonlin Ch02 NonlinearVictor SanchezNessuna valutazione finora
- 3 Quarterly Exam: Eim 7 ExploratoryDocumento3 pagine3 Quarterly Exam: Eim 7 ExploratoryJulcon Avanceña Araiz100% (1)
- Causeway BOQDocumento7 pagineCauseway BOQSujan GhimireNessuna valutazione finora
- Almansoori Inspection Services: Travelling Block AssemblyDocumento2 pagineAlmansoori Inspection Services: Travelling Block AssemblyRanjithNessuna valutazione finora
- Reality Lighting 2022 灯饰目录Documento277 pagineReality Lighting 2022 灯饰目录qq1691492197Nessuna valutazione finora
- Lecture 1Documento24 pagineLecture 1SaurabhNessuna valutazione finora
- Overtime AccomplishmentDocumento9 pagineOvertime AccomplishmentKate PerezNessuna valutazione finora
- Astm A 403 / A 403M - 06Documento7 pagineAstm A 403 / A 403M - 06negg 348100% (1)
- Ansi b36.10 Seamless Pipe SizesDocumento2 pagineAnsi b36.10 Seamless Pipe SizesmohitNessuna valutazione finora
- Tricocat PDFDocumento44 pagineTricocat PDFJuan PabloNessuna valutazione finora
- 2000 IBC Handbook Seismic & WindDocumento11 pagine2000 IBC Handbook Seismic & WindcristinelbNessuna valutazione finora
- ACI 350 CalculationDocumento3 pagineACI 350 CalculationBoris GalindoNessuna valutazione finora
- 1 - Introduction To AggregateDocumento22 pagine1 - Introduction To AggregateFatin HazwaniNessuna valutazione finora
- SG653PB1 ADocumento5 pagineSG653PB1 ADANILO MEDINA OSORIONessuna valutazione finora
- Large-Scale Direct Shear Testing of Geocell Reinforced SoilDocumento6 pagineLarge-Scale Direct Shear Testing of Geocell Reinforced SoilnarutowhatsupNessuna valutazione finora
- Rolling ProcessDocumento17 pagineRolling ProcessRavichandran GNessuna valutazione finora