Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- SPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingDocumento10 pagineSPE-121928 Field Development and Productivity Improvement in ... Synergistic Approach To Carbonate Fracture AcidizingBruceNessuna valutazione finora
- Instruction Manual B-Tronic SystemDocumento35 pagineInstruction Manual B-Tronic SystemYipper ShnipperNessuna valutazione finora
- EMDCSS DatasheetDocumento5 pagineEMDCSS DatasheetHoracio UlloaNessuna valutazione finora
- Dell's Guide To Server Basics: Click On The Questions Below To Learn More About Servers: 1. 2. 3. 4. 4.1. 4.2. 4.3. 5. 6Documento11 pagineDell's Guide To Server Basics: Click On The Questions Below To Learn More About Servers: 1. 2. 3. 4. 4.1. 4.2. 4.3. 5. 6rameshNessuna valutazione finora
- Exam H13-611: IT Certification Guaranteed, The Easy Way!Documento96 pagineExam H13-611: IT Certification Guaranteed, The Easy Way!AdeyemiNessuna valutazione finora
- Estimation of Microbial GrowthDocumento25 pagineEstimation of Microbial GrowthziaiitdNessuna valutazione finora
- Module 1 SIMPLE INTERESTDocumento15 pagineModule 1 SIMPLE INTERESTElle Villanueva VlogNessuna valutazione finora
- Probability H Venn Diagrams v2 SOLUTIONS v2 2 PDFDocumento7 pagineProbability H Venn Diagrams v2 SOLUTIONS v2 2 PDFEcho BaguinonNessuna valutazione finora
- Back-to-Back Accelerometer CalibrationDocumento3 pagineBack-to-Back Accelerometer CalibrationAekDzLaiNessuna valutazione finora
- Binomial Poisson Normal DistributionDocumento9 pagineBinomial Poisson Normal DistributionFahim MahmudNessuna valutazione finora
- Power Window Four Windows: Modul ControlsDocumento2 paginePower Window Four Windows: Modul ControlsHery IswantoNessuna valutazione finora
- Chemistry Note Form 5Documento9 pagineChemistry Note Form 5SofiyyahOpieNessuna valutazione finora
- Corrosion Performance of Mild Steel and GalvanizedDocumento18 pagineCorrosion Performance of Mild Steel and GalvanizedNarasimha DvlNessuna valutazione finora
- Cisco Ccna Icnd PPT 2.0 OspfDocumento15 pagineCisco Ccna Icnd PPT 2.0 OspfAMIT RAJ KAUSHIKNessuna valutazione finora
- SampleDocumento43 pagineSampleSri E.Maheswar Reddy Assistant ProfessorNessuna valutazione finora
- PLCC-28: FeaturesDocumento5 paginePLCC-28: Features肖磊Nessuna valutazione finora
- Relayoperationprinciples 141126065914 Conversion Gate01Documento43 pagineRelayoperationprinciples 141126065914 Conversion Gate01kenlavie2Nessuna valutazione finora
- Assignments CHSSCDocumento7 pagineAssignments CHSSCphani12_chem5672Nessuna valutazione finora
- PDF 4.6 MDocumento2 paginePDF 4.6 MmdisicNessuna valutazione finora
- Klüberpaste HS 91-21 EN enDocumento4 pagineKlüberpaste HS 91-21 EN entroy2k0Nessuna valutazione finora
- Change ManDocumento17 pagineChange Mansrikanth9gannuNessuna valutazione finora
- Game TheoryDocumento13 pagineGame TheoryPriyanka ChaurasiyaNessuna valutazione finora
- BM2 24H+Installation+InstructionsDocumento7 pagineBM2 24H+Installation+InstructionsremediospereiraNessuna valutazione finora
- Intro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeDocumento19 pagineIntro 4 - Substantive Concepts: Description Remarks and Examples References Also SeeAntonella PetrilloNessuna valutazione finora
- An Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual CapitalDocumento30 pagineAn Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual Capitalmaher76Nessuna valutazione finora
- Creating Interfaces For The SAP Application Interface Framework With Service Implementation WorkbenchDocumento12 pagineCreating Interfaces For The SAP Application Interface Framework With Service Implementation WorkbenchKrishanu DuttaNessuna valutazione finora
- Unit 7 Motion Review Sheet AnswersDocumento3 pagineUnit 7 Motion Review Sheet AnswersFlorie Fe Rosario Ortega100% (1)
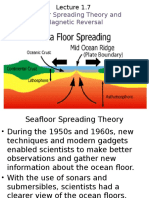
- Seafloor Spreading TheoryDocumento16 pagineSeafloor Spreading TheoryMark Anthony Evangelista Cabrieto100% (1)
- BQ 76 PL 102Documento23 pagineBQ 76 PL 102AlexNessuna valutazione finora
- Kitar FosforusDocumento4 pagineKitar FosforusMohd Hakimi MD Setapa100% (1)