Potrebbero piacerti anche
- A Fast Clustering Algorithm To Cluster Very Large Categorical Data Sets in Data MiningDocumento13 pagineA Fast Clustering Algorithm To Cluster Very Large Categorical Data Sets in Data MiningSunny NguyenNessuna valutazione finora
- Dynamics of Structures - 2nd Edition (J L Humar)Documento994 pagineDynamics of Structures - 2nd Edition (J L Humar)joejo_s100% (7)
- 11536.engineering Maths-I (AML5101)Documento4 pagine11536.engineering Maths-I (AML5101)Abhinav Gupta0% (2)
- Fundamentals of Mathematical Physics Edgar A KrautDocumento21 pagineFundamentals of Mathematical Physics Edgar A KrautSayantanNessuna valutazione finora
- A Survey of Kernel and Spectral Methods For ClusteringDocumento15 pagineA Survey of Kernel and Spectral Methods For ClusteringAnwar ShahNessuna valutazione finora
- Clustering With Shallow TreesDocumento17 pagineClustering With Shallow TreespasomagaNessuna valutazione finora
- Ijcttjournal V1i1p12Documento3 pagineIjcttjournal V1i1p12surendiran123Nessuna valutazione finora
- 1 C. Fraley and A. E. Raftery Technical Report No. 329 Department of Statistics University of Washington Box 354322 Seattle, WA 98195-4322 USA February 27, 1998Documento18 pagine1 C. Fraley and A. E. Raftery Technical Report No. 329 Department of Statistics University of Washington Box 354322 Seattle, WA 98195-4322 USA February 27, 1998giulio_giammuss9856Nessuna valutazione finora
- Ba 2419551957Documento3 pagineBa 2419551957IJMERNessuna valutazione finora
- Statistical Considerations On The K - Means AlgorithmDocumento9 pagineStatistical Considerations On The K - Means AlgorithmVeronica DumitrescuNessuna valutazione finora
- Szeliski 2002Documento36 pagineSzeliski 2002Novianti MarthenNessuna valutazione finora
- An Overview of Advances of Pattern Recognition Systems in Computer VisionDocumento27 pagineAn Overview of Advances of Pattern Recognition Systems in Computer VisionHoang LMNessuna valutazione finora
- HCPC Husson JosseDocumento17 pagineHCPC Husson JosseZain AamirNessuna valutazione finora
- Automatic Clustering Using An Improved Differential Evolution AlgorithmDocumento20 pagineAutomatic Clustering Using An Improved Differential Evolution Algorithmavinash223Nessuna valutazione finora
- Comprehensive Review of K-Means Clustering AlgorithmsDocumento5 pagineComprehensive Review of K-Means Clustering AlgorithmsEditor IjasreNessuna valutazione finora
- 1 s2.0 S0031320311005188 MainDocumento15 pagine1 s2.0 S0031320311005188 MainRohhan RabariNessuna valutazione finora
- Data Clustering: A ReviewDocumento60 pagineData Clustering: A Reviewhub23Nessuna valutazione finora
- I Jcs It 2015060141Documento5 pagineI Jcs It 2015060141SunilAjmeeraNessuna valutazione finora
- Mesh Segmentation - A Comparative Study: M. Attene Imati-Cnr S. Katz Technion M. Mortara Imati-CnrDocumento12 pagineMesh Segmentation - A Comparative Study: M. Attene Imati-Cnr S. Katz Technion M. Mortara Imati-CnrmpixlasNessuna valutazione finora
- Siam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Documento23 pagineSiam J. S - C - 1998 Society For Industrial and Applied Mathematics Vol. 19, No. 2, Pp. 364-386, March 1998 003Sidney LinsNessuna valutazione finora
- Survey of Clustering Data Mining Techniques: Pavel BerkhinDocumento56 pagineSurvey of Clustering Data Mining Techniques: Pavel BerkhinFabiola Munoz VelandoNessuna valutazione finora
- Multilevel Image Segmentation Based On Fractional-Order Darwinian Particle Swarm OptimizationDocumento13 pagineMultilevel Image Segmentation Based On Fractional-Order Darwinian Particle Swarm OptimizationAnonymous PsEz5kGVaeNessuna valutazione finora
- An Efficient Hybrid Algorithm Using Cuckoo SearchDocumento13 pagineAn Efficient Hybrid Algorithm Using Cuckoo SearchrasminojNessuna valutazione finora
- An Enhanced Medical Images Segmentation Using Skey Gaussian Mixture Model and Hierarchical Clustering AlgorithmDocumento11 pagineAn Enhanced Medical Images Segmentation Using Skey Gaussian Mixture Model and Hierarchical Clustering AlgorithmIJMAJournalNessuna valutazione finora
- A Simplex Method-Based Social Spider Optimization Algorithm For Clustering AnalysisDocumento28 pagineA Simplex Method-Based Social Spider Optimization Algorithm For Clustering AnalysisVivi AnNessuna valutazione finora
- Image Classification Techniques-A SurveyDocumento4 pagineImage Classification Techniques-A SurveyInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Chiwoo Park, Member, IEEE, Jianhua Z. Huang, Jim X. Ji, Senior Member, IEEE, and Yu Ding, Senior Member, IEEEDocumento51 pagineChiwoo Park, Member, IEEE, Jianhua Z. Huang, Jim X. Ji, Senior Member, IEEE, and Yu Ding, Senior Member, IEEENurulRahmaNessuna valutazione finora
- Community Detection Using Statistically Significant Subgraph MiningDocumento10 pagineCommunity Detection Using Statistically Significant Subgraph MiningAnonymousNessuna valutazione finora
- Efficient Data Clustering With Link ApproachDocumento8 pagineEfficient Data Clustering With Link ApproachseventhsensegroupNessuna valutazione finora
- Ult SCH 94 BenchmarkDocumento14 pagineUlt SCH 94 BenchmarkarshinNessuna valutazione finora
- The Clustering Validity With Silhouette and Sum of Squared ErrorsDocumento8 pagineThe Clustering Validity With Silhouette and Sum of Squared Errorsyash luckyNessuna valutazione finora
- Clustering Hierarchical AlgorithmsDocumento21 pagineClustering Hierarchical AlgorithmsjhoysNessuna valutazione finora
- tmp9C3B TMPDocumento8 paginetmp9C3B TMPFrontiersNessuna valutazione finora
- Medical Image Segmentation: Fuzzy Hopfield Neural Netwolrk ForDocumento10 pagineMedical Image Segmentation: Fuzzy Hopfield Neural Netwolrk ForSiva KumarNessuna valutazione finora
- A Novel Multi-Viewpoint Based Similarity Measure For Document ClusteringDocumento4 pagineA Novel Multi-Viewpoint Based Similarity Measure For Document ClusteringIJMERNessuna valutazione finora
- Paper 16 - Clustering Applied To Data Structuring and RetrievalDocumento6 paginePaper 16 - Clustering Applied To Data Structuring and RetrievalEditor IJACSANessuna valutazione finora
- Bases de DatosDocumento15 pagineBases de DatosIvan HSNessuna valutazione finora
- A Three-Way Cluster Ensemble Approach For Large-Scale DataDocumento18 pagineA Three-Way Cluster Ensemble Approach For Large-Scale DataAnwar ShahNessuna valutazione finora
- Analysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional DataDocumento5 pagineAnalysis of Dendrogram Tree For Identifying and Visualizing Trends in Multi-Attribute Transactional Datasurendiran123Nessuna valutazione finora
- Sine Cosine Based Algorithm For Data ClusteringDocumento5 pagineSine Cosine Based Algorithm For Data ClusteringAnonymous lPvvgiQjRNessuna valutazione finora
- FUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProceDocumento6 pagineFUZZY PREDICTIVE MODELLING USING HIERARCHICAL CLUSTERING AND - 2007 - IFAC ProcesmeykelNessuna valutazione finora
- Association Rule and Decision Tree Based Methods For Fuzzy Rule Base GenerationDocumento6 pagineAssociation Rule and Decision Tree Based Methods For Fuzzy Rule Base GenerationpasaitowNessuna valutazione finora
- PR Assignment 02 - Seemal Ajaz (206979)Documento5 paginePR Assignment 02 - Seemal Ajaz (206979)Azka NawazNessuna valutazione finora
- Random Forest Algorithm For Land Cover Classification: Arun D. Kulkarni and Barrett LoweDocumento6 pagineRandom Forest Algorithm For Land Cover Classification: Arun D. Kulkarni and Barrett LoweEditor IJRITCCNessuna valutazione finora
- 105 Machine Learning PaperDocumento6 pagine105 Machine Learning PaperAabda AhmedNessuna valutazione finora
- Chang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsDocumento7 pagineChang Liang Et Al - Scaling Up Kernel Grower Clustering Method For Large Data Sets Via Core-SetsTuhmaNessuna valutazione finora
- Knee Point Detection For Detecting Automatically The Number of Clusters During Clustering TechniquesDocumento10 pagineKnee Point Detection For Detecting Automatically The Number of Clusters During Clustering TechniquesMarub AsubNessuna valutazione finora
- Classification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksDocumento5 pagineClassification of Symbolic Objects Using Adaptive Auto-Configuring RBF Neural NetworksscribdkhatnNessuna valutazione finora
- Clustering With Decision Trees: Divisive and Agglomerative ApproachDocumento6 pagineClustering With Decision Trees: Divisive and Agglomerative ApproachNimra KarimNessuna valutazione finora
- Graph Partitioning Advance Clustering TechniqueDocumento14 pagineGraph Partitioning Advance Clustering TechniqueijcsesNessuna valutazione finora
- Recognition Using Curvature Scale Space and Artificial Neural NetworksDocumento6 pagineRecognition Using Curvature Scale Space and Artificial Neural NetworksMuthu Vijay DeepakNessuna valutazione finora
- GDBSCANDocumento30 pagineGDBSCANkkoushikgmailcomNessuna valutazione finora
- Renato Kresch and David MalahDocumento32 pagineRenato Kresch and David MalahsatishmailaganiNessuna valutazione finora
- Feature Selection Based On Fuzzy EntropyDocumento5 pagineFeature Selection Based On Fuzzy EntropyInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- Iijit 2014 06 12 024Documento6 pagineIijit 2014 06 12 024International Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- 10 1109@TNNLS 2018 2853407Documento15 pagine10 1109@TNNLS 2018 2853407Shiny R MNessuna valutazione finora
- A Fuzzy If-Then Rule-Based Nonlinear Classifier: Int. J. Appl. Math. Comput. Sci., 2003, Vol. 13, No. 2, 215-223Documento9 pagineA Fuzzy If-Then Rule-Based Nonlinear Classifier: Int. J. Appl. Math. Comput. Sci., 2003, Vol. 13, No. 2, 215-223nhie12Nessuna valutazione finora
- Introduction To Five Data ClusteringDocumento10 pagineIntroduction To Five Data ClusteringerkanbesdokNessuna valutazione finora
- An Efficient Enhanced K-Means Clustering AlgorithmDocumento8 pagineAn Efficient Enhanced K-Means Clustering Algorithmahmed_fahim98Nessuna valutazione finora
- Uncertainty ModellingDocumento7 pagineUncertainty ModellingOkky WarmanNessuna valutazione finora
- Cluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With ADocumento11 pagineCluster Analysis or Clustering Is The Art of Separating The Data Points Into Dissimilar Group With AramaabbidiNessuna valutazione finora
- Locally Linear Representation For Image Clustering: Liangli Zhen, Zhang Yi, Xi Peng and Dezhong PengDocumento2 pagineLocally Linear Representation For Image Clustering: Liangli Zhen, Zhang Yi, Xi Peng and Dezhong PengShahid KINessuna valutazione finora
- Module 12Documento25 pagineModule 12Shahid KINessuna valutazione finora
- Fast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationDocumento22 pagineFast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationShahid KINessuna valutazione finora
- CVPR16 Tutorial Subspace Clustering Scalable SSC ReneDocumento34 pagineCVPR16 Tutorial Subspace Clustering Scalable SSC ReneShahid KINessuna valutazione finora
- Efficient Sparse Representation Classification Using Adaptive ClusteringDocumento7 pagineEfficient Sparse Representation Classification Using Adaptive ClusteringShahid KINessuna valutazione finora
- EE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoDocumento2 pagineEE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoShahid KINessuna valutazione finora
- Assignment 3Documento2 pagineAssignment 3Shahid KINessuna valutazione finora
- Ee370 Ass2 Matlab CodeDocumento1 paginaEe370 Ass2 Matlab CodeShahid KINessuna valutazione finora
- Lec 3 VerilogDocumento36 pagineLec 3 VerilogShahid KINessuna valutazione finora
- Adaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraDocumento5 pagineAdaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraShahid KINessuna valutazione finora
- Lec 03Documento19 pagineLec 03akashsherNessuna valutazione finora
- EE321 - Assignment I: January 11, 2014Documento1 paginaEE321 - Assignment I: January 11, 2014Shahid KINessuna valutazione finora
- Allamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersDocumento11 pagineAllamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersShahid KI100% (1)
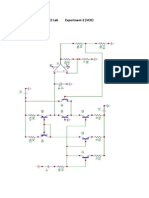
- EE381A: EC Lab Experiment-2 (VCO)Documento2 pagineEE381A: EC Lab Experiment-2 (VCO)Shahid KINessuna valutazione finora
- Ac PDFDocumento1 paginaAc PDFShahid KINessuna valutazione finora
- 8085 InstructionsetDocumento21 pagine8085 InstructionsetAmarjeet OberoiNessuna valutazione finora
- Ballbeam EE380 Fall09 PDFDocumento13 pagineBallbeam EE380 Fall09 PDFShahid KINessuna valutazione finora
- Multi Degrees of Freedom SystemDocumento23 pagineMulti Degrees of Freedom SystemHani BanatNessuna valutazione finora
- Classical MechanicsDocumento159 pagineClassical MechanicsjoniakomNessuna valutazione finora
- Computer Science & Engineering Department ElectivesDocumento13 pagineComputer Science & Engineering Department Electivesnitro gtnaNessuna valutazione finora
- B.tech Ece R-18 Syllabus PDFDocumento180 pagineB.tech Ece R-18 Syllabus PDFMrcet EceNessuna valutazione finora
- Hydrological Processes - 2022 - Porter - Controls On Decadal Annual and Seasonal Concentration Discharge Relationships inDocumento18 pagineHydrological Processes - 2022 - Porter - Controls On Decadal Annual and Seasonal Concentration Discharge Relationships inAqibAnsariNessuna valutazione finora
- Roughdraft 3Documento16 pagineRoughdraft 3api-670141117Nessuna valutazione finora
- StatisticsDocumento41 pagineStatisticsSiddharth DasNessuna valutazione finora
- Partial Differential Equation Toolbox Release NotesDocumento48 paginePartial Differential Equation Toolbox Release NotesmuradbashirNessuna valutazione finora
- The Impact of Infective Immigrants On The Spread of Dog RabiesDocumento10 pagineThe Impact of Infective Immigrants On The Spread of Dog Rabiestibebu tuluNessuna valutazione finora
- LambdaDocumento8 pagineLambdaMichael FelicianoNessuna valutazione finora
- Pangasinan State University: FINAL EXAM IN Linear AlgebraDocumento2 paginePangasinan State University: FINAL EXAM IN Linear AlgebraSharlyn BalgoaNessuna valutazione finora
- Advanced Control SystemsDocumento81 pagineAdvanced Control Systemsanoop sathyanNessuna valutazione finora
- Assignments LaDocumento13 pagineAssignments LaritwikberaNessuna valutazione finora
- Minimum Time ControlDocumento6 pagineMinimum Time ControlLi NguyenNessuna valutazione finora
- Built in Function in MatlabDocumento6 pagineBuilt in Function in MatlabJitul RajbongshiNessuna valutazione finora
- Generalized Fierz IdentitiesDocumento18 pagineGeneralized Fierz Identitieszcapg17Nessuna valutazione finora
- Differentiable ManifoldsDocumento161 pagineDifferentiable Manifoldsseyed amir salmanNessuna valutazione finora
- Versa Frame ManualDocumento240 pagineVersa Frame ManualElio SaldañaNessuna valutazione finora
- Numerical Methods CollardDocumento431 pagineNumerical Methods CollardSafis HajjouzNessuna valutazione finora
- P-Delta and Buckling Analysis (Structure Facade)Documento12 pagineP-Delta and Buckling Analysis (Structure Facade)bradbaderNessuna valutazione finora
- Introduction To Programming Econometrics With R - DraftDocumento55 pagineIntroduction To Programming Econometrics With R - Draftvenkatr2004Nessuna valutazione finora
- (2023) (Thoudam) Effect of Topology On The Collapse Transition and The Instantaneous Shape of A Model HeteropolymerDocumento13 pagine(2023) (Thoudam) Effect of Topology On The Collapse Transition and The Instantaneous Shape of A Model HeteropolymerIsabel CamusNessuna valutazione finora
- Calculation Notes of Silo 4M X9M: DescriptionDocumento28 pagineCalculation Notes of Silo 4M X9M: Descriptionahmed aboyosefNessuna valutazione finora
- Assignment - 1Documento2 pagineAssignment - 1Vanshaj AanandNessuna valutazione finora
- EE263 Homework 5 SolutionsDocumento4 pagineEE263 Homework 5 SolutionsJoel M ChNessuna valutazione finora
- Basic Matrix OperationsDocumento9 pagineBasic Matrix OperationsNeha KarthikeyanNessuna valutazione finora