Potrebbero piacerti anche
- Control PID: Análisis de un proceso con controlador PIDDocumento10 pagineControl PID: Análisis de un proceso con controlador PIDAlex SandroNessuna valutazione finora
- Convierte Automóvil a EléctricoDocumento21 pagineConvierte Automóvil a EléctricoJavier Avalos Villaseñor100% (1)
- Control de Proceso SV 10Documento314 pagineControl de Proceso SV 10Andrea del Pilar Obeso TantapomaNessuna valutazione finora
- PLC Siemens s7-1200Documento7 paginePLC Siemens s7-1200MiryamNessuna valutazione finora
- Introducción A Los Controladores PIDDocumento24 pagineIntroducción A Los Controladores PIDVictor ReyesNessuna valutazione finora
- Manual Baño Serologico HH-S2Documento5 pagineManual Baño Serologico HH-S2Manuela OchoaNessuna valutazione finora
- Reglas Ziegler-Nichols sintonizar PIDDocumento11 pagineReglas Ziegler-Nichols sintonizar PIDAdrianRmzNessuna valutazione finora
- Diseño y selección de procesos productivosDocumento23 pagineDiseño y selección de procesos productivosDaniel Vargas M100% (2)
- Manual planta control procesos Universidad ValleDocumento35 pagineManual planta control procesos Universidad ValleDavid EcheverryNessuna valutazione finora
- Evaluación económica de proyectos: Ejercicios resueltos tiene y resume de manera concisa el contenido del documento, que presenta ejercicios resueltos sobre la evaluación económica de proyectosDocumento71 pagineEvaluación económica de proyectos: Ejercicios resueltos tiene y resume de manera concisa el contenido del documento, que presenta ejercicios resueltos sobre la evaluación económica de proyectosOsvaldo D. Burgos Gutiérrez100% (2)
- Presentacion Variadores de Frecuencia Vacon (Master 2011)Documento91 paginePresentacion Variadores de Frecuencia Vacon (Master 2011)Pablo GonzalezNessuna valutazione finora
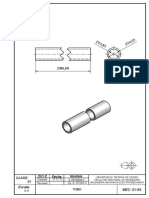
- Modelo Tubo de CobreDocumento1 paginaModelo Tubo de CobreGian RfNessuna valutazione finora
- Coraza de protección para máquina herramientaDocumento1 paginaCoraza de protección para máquina herramientaGian RfNessuna valutazione finora
- Análisis de un sistema de refrigeración por compresión de vaporDocumento3 pagineAnálisis de un sistema de refrigeración por compresión de vaporhergernoNessuna valutazione finora
- CaratulaDocumento1 paginaCaratulaGian RfNessuna valutazione finora
- Laboratorio N1 AutomotrizzDocumento19 pagineLaboratorio N1 AutomotrizzGian RfNessuna valutazione finora
- Lab03 Proyectos3216Documento6 pagineLab03 Proyectos3216Liceth777Nessuna valutazione finora
- Cabezal de SoporteDocumento1 paginaCabezal de SoporteGian RfNessuna valutazione finora
- Art 16Documento10 pagineArt 16juan carlosNessuna valutazione finora
- 213 Rguia 1Documento3 pagine213 Rguia 1Gian RfNessuna valutazione finora
- 10propuesta Curricular Metalmecanica Integral PDFDocumento56 pagine10propuesta Curricular Metalmecanica Integral PDFGian RfNessuna valutazione finora
- 211 Rguia 1Documento3 pagine211 Rguia 1Gian RfNessuna valutazione finora
- Tipos de Virus de ComputadorasDocumento30 pagineTipos de Virus de ComputadorasGian RfNessuna valutazione finora
- Calor Especifico de La ZanahoraiDocumento2 pagineCalor Especifico de La ZanahoraiGian Rf0% (1)
- 1432 3121 1 PBDocumento14 pagine1432 3121 1 PBGian RfNessuna valutazione finora
- 1 289789805762445336Documento8 pagine1 289789805762445336Gian RfNessuna valutazione finora
- Clasificacion Especializada A MecanicaDocumento1 paginaClasificacion Especializada A MecanicaGian RfNessuna valutazione finora
- Educación sexual comunitariaDocumento14 pagineEducación sexual comunitariaGian RfNessuna valutazione finora
- 2-C Presentación para Video MCCTDocumento16 pagine2-C Presentación para Video MCCTGian RfNessuna valutazione finora
- Ejercicio 3 Con FinanciamientoDocumento12 pagineEjercicio 3 Con FinanciamientoGian RfNessuna valutazione finora
- Proyecto Con GpsDocumento2 pagineProyecto Con GpsGian RfNessuna valutazione finora
- 2-C Presentación para Video MCCTDocumento16 pagine2-C Presentación para Video MCCTGian RfNessuna valutazione finora
- Solu Septiembre 2003Documento5 pagineSolu Septiembre 2003Gian RfNessuna valutazione finora
- Relaciones Suelo, Tiro y Labranza PDFDocumento25 pagineRelaciones Suelo, Tiro y Labranza PDFRicardo Julk' VeraNessuna valutazione finora
- Registropostulante PdofDocumento1 paginaRegistropostulante PdofGian RfNessuna valutazione finora
- Ocw - Upc.edu Sites Default Files Materials 15013050 28064-3822Documento50 pagineOcw - Upc.edu Sites Default Files Materials 15013050 28064-3822Manuel Wenceslao Nizama BobadillaNessuna valutazione finora
- Informe Final PID LuminosidadDocumento19 pagineInforme Final PID LuminosidadandresscorpioNessuna valutazione finora
- Revista Del Diseño Innovativo V3 N9 2Documento8 pagineRevista Del Diseño Innovativo V3 N9 2jose varelaNessuna valutazione finora
- Estrategias de Control Automático: Examen PrácticaDocumento6 pagineEstrategias de Control Automático: Examen PrácticaGianpier Anthony HuertaNessuna valutazione finora
- Control Lógico AvanzadoDocumento23 pagineControl Lógico AvanzadoaleNessuna valutazione finora
- Principios de Insttrumentación y ControlDocumento18 paginePrincipios de Insttrumentación y ControlDany RubioNessuna valutazione finora
- Identificación y Control de Posición de Un Sistema de Levitación NeumáticaDocumento7 pagineIdentificación y Control de Posición de Un Sistema de Levitación NeumáticaJahiro JayaNessuna valutazione finora
- Control DigitalDocumento4 pagineControl DigitalLuis Daniel Hernández MartínezNessuna valutazione finora
- P7 Control de Velocidad en Lazo Cerrado para Un Motor DCDocumento7 pagineP7 Control de Velocidad en Lazo Cerrado para Un Motor DCAndersonNessuna valutazione finora
- Control Automatico 1Documento15 pagineControl Automatico 1Gabriel VeraNessuna valutazione finora
- Especificaciones Variadores de Frcuencia SM PDFDocumento32 pagineEspecificaciones Variadores de Frcuencia SM PDFMarcelo Alejandro Araya VidelaNessuna valutazione finora
- Lab MotorDocumento13 pagineLab MotorJhon Freddy SanchezNessuna valutazione finora
- Taller Segundo Corte Tópicos Avanzados de ControlDocumento5 pagineTaller Segundo Corte Tópicos Avanzados de ControlJhon RodriguezNessuna valutazione finora
- Control Cascada PlcsDocumento4 pagineControl Cascada PlcsAlex TipantuñaNessuna valutazione finora
- Programacion para Control de Temperatura BasicoDocumento4 pagineProgramacion para Control de Temperatura BasicoMarco Antonio Laura AruquipaNessuna valutazione finora
- Construcción de un controlador PID con amplificadores operacionalesDocumento11 pagineConstrucción de un controlador PID con amplificadores operacionalesArnan N. MichelNessuna valutazione finora
- Equipo 9 Unidad 2 Practica 4Documento11 pagineEquipo 9 Unidad 2 Practica 4Cristian Gerardo Enciso LunaNessuna valutazione finora
- Análisis Sistema DC Cuatro CuadrantesDocumento2 pagineAnálisis Sistema DC Cuatro CuadrantesCarolina Galvan SaezNessuna valutazione finora
- Informe 13 Control de ProcesosDocumento15 pagineInforme 13 Control de ProcesosvidalNessuna valutazione finora
- Control PIDMotor DCDocumento12 pagineControl PIDMotor DCZahyre StarkNessuna valutazione finora
- Informe Planta TérmicaDocumento8 pagineInforme Planta TérmicaBuscas Trabajo Inicia Hoy100% (1)
- Informe Técnico - Máquina Seleccionadora de Café Cerezo - G1Documento136 pagineInforme Técnico - Máquina Seleccionadora de Café Cerezo - G1berthingNessuna valutazione finora