Potrebbero piacerti anche
- Random VibrationsDocumento20 pagineRandom VibrationsVivek PandeyNessuna valutazione finora
- Must Know Formula On Physics For AIPMT NewDocumento78 pagineMust Know Formula On Physics For AIPMT Newanshul sharma33% (3)
- Applications of HydrostaticsDocumento7 pagineApplications of HydrostaticsDwiki Ali SNessuna valutazione finora
- CS Cheat SheetDocumento8 pagineCS Cheat SheetSyed Farhan FaroghNessuna valutazione finora
- Free Vibration With DampingDocumento31 pagineFree Vibration With Dampingriya pradhanNessuna valutazione finora
- Vibrations Formula Sheet Vibrations FullDocumento5 pagineVibrations Formula Sheet Vibrations FullmrslayerdudeNessuna valutazione finora
- Tips For JeeDocumento54 pagineTips For JeeAdithyaSBhatNessuna valutazione finora
- 2 IitDocumento13 pagine2 IitramchanderNessuna valutazione finora
- Preparation Guide by AIR-1 JAM & JEST - Rishabh KaushikDocumento12 paginePreparation Guide by AIR-1 JAM & JEST - Rishabh KaushikNamasteNessuna valutazione finora
- Mechanical Vibration Lecture 5Documento50 pagineMechanical Vibration Lecture 5Mohanad Al-tahrawiNessuna valutazione finora
- Mechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Documento5 pagineMechanical Vibration 2 Marks Questions With Answer: 1. What Is Meant by Vibrations?Mahendra PathakNessuna valutazione finora
- Chapter 05 - Gas Laws and KMTDocumento22 pagineChapter 05 - Gas Laws and KMTmijaggiNessuna valutazione finora
- Plancess Study ManualDocumento14 paginePlancess Study ManualSidhuSid100% (1)
- Lewis Structure Spring 2014Documento7 pagineLewis Structure Spring 2014Mohamed DahmaneNessuna valutazione finora
- Bonding RefresherDocumento28 pagineBonding RefresherPierce TaylorNessuna valutazione finora
- Mechanical Vibration - MSD - Part 2Documento9 pagineMechanical Vibration - MSD - Part 2Mohammad Saad SalimNessuna valutazione finora
- Fundamentals of Mechanical VibrationsDocumento74 pagineFundamentals of Mechanical VibrationsПараг ТамбеNessuna valutazione finora
- Mechanical Vibrations QuestionDocumento1 paginaMechanical Vibrations QuestionFadi W MoussaNessuna valutazione finora
- Mechanical Vibrations (ME 65) Chapter-8 Multi Degree of Freedom SystemsDocumento36 pagineMechanical Vibrations (ME 65) Chapter-8 Multi Degree of Freedom SystemsGURUPRASAD KADAGADNessuna valutazione finora
- College of Technology - Riyadh: Kingdom of Saudi ArabiaDocumento87 pagineCollege of Technology - Riyadh: Kingdom of Saudi Arabiamohamed fattal100% (1)
- 5thin & Thick Cylinders PDFDocumento36 pagine5thin & Thick Cylinders PDFP R VenkateshNessuna valutazione finora
- Cycles Cheat SheetDocumento3 pagineCycles Cheat Sheetapi-368121935Nessuna valutazione finora
- WINSEM2018-19 - MEE3001 - TH - CTS202 - VL2018195003764 - Reference Material I - Module 2 Design Against Fluctuating LoadDocumento46 pagineWINSEM2018-19 - MEE3001 - TH - CTS202 - VL2018195003764 - Reference Material I - Module 2 Design Against Fluctuating LoadViswanath MNessuna valutazione finora
- JEE Main Advanced Topic Wise PDFDocumento1 paginaJEE Main Advanced Topic Wise PDFDeeptanshNessuna valutazione finora
- Introduction and Basic Concepts: Heat and Mass Transfer: Fundamentals & ApplicationsDocumento46 pagineIntroduction and Basic Concepts: Heat and Mass Transfer: Fundamentals & ApplicationsMatthew ShieldsNessuna valutazione finora
- DR KC Yadav, Director, Jindal Institute of Power TechnologyDocumento75 pagineDR KC Yadav, Director, Jindal Institute of Power TechnologyPrudhvi RajNessuna valutazione finora
- Newtons Law of MotionDocumento25 pagineNewtons Law of MotionJoca RiveraNessuna valutazione finora
- Midterm VibrationsDocumento18 pagineMidterm VibrationsAravind KumarNessuna valutazione finora
- Harmonically Excited VibrationDocumento61 pagineHarmonically Excited VibrationSiddharth MohanNessuna valutazione finora
- MneumonicsDocumento4 pagineMneumonicsHarsh AryanNessuna valutazione finora
- Columns & StrutsDocumento23 pagineColumns & StrutsAshish MaheshwariNessuna valutazione finora
- Simple Harmonic Motion (JEE-SHM)Documento4 pagineSimple Harmonic Motion (JEE-SHM)Unknown anonymous100% (1)
- Work, Power, Energy-Practice ProblemDocumento18 pagineWork, Power, Energy-Practice ProblemApex Institute0% (1)
- Vibration BySK MondalDocumento25 pagineVibration BySK MondalRahul KumarNessuna valutazione finora
- Unit 1 - Mechanical Vibration - WWW - Rgpvnotes.inDocumento11 pagineUnit 1 - Mechanical Vibration - WWW - Rgpvnotes.inKamlesh PatelNessuna valutazione finora
- Vibrations Solutions Section2 7Documento17 pagineVibrations Solutions Section2 7Mani Kumar100% (1)
- Course File Probability and StatisticsDocumento72 pagineCourse File Probability and StatisticsAkash BahugunaNessuna valutazione finora
- Free Vibration: Presented by Tuan Mohd Hafeez Bin Tuan IbrahimDocumento56 pagineFree Vibration: Presented by Tuan Mohd Hafeez Bin Tuan IbrahimhamryNessuna valutazione finora
- Mech VibrationDocumento14 pagineMech VibrationSquakx BescilNessuna valutazione finora
- Hamiltons Principle 1 PDFDocumento23 pagineHamiltons Principle 1 PDFVinaykumar YadavNessuna valutazione finora
- Hamiltonian Mechanics PDFDocumento22 pagineHamiltonian Mechanics PDFAtalia NavaNessuna valutazione finora
- Exergy (Thermodynamics)Documento4 pagineExergy (Thermodynamics)justdanish100% (1)
- Numerical and Continuum Analysis1 - NumericalDocumento34 pagineNumerical and Continuum Analysis1 - NumericalgheinbaNessuna valutazione finora
- 27-11 Mechanical Vibration (ME)Documento3 pagine27-11 Mechanical Vibration (ME)Mahir MahmoodNessuna valutazione finora
- Chapter 13 - Limits and Derivatives Revision Notes Online DT1Documento9 pagineChapter 13 - Limits and Derivatives Revision Notes Online DT1deep34Nessuna valutazione finora
- 2D Motion of A Particle Using Plan-Polar Coordinates: Velocity ComponentsDocumento71 pagine2D Motion of A Particle Using Plan-Polar Coordinates: Velocity Componentssharwan sharmaNessuna valutazione finora
- Physics Cheat Sheet 2Documento1 paginaPhysics Cheat Sheet 2mifewpmfewpoNessuna valutazione finora
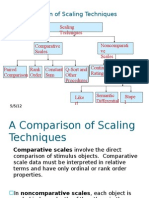
- Scaling TechniquesDocumento45 pagineScaling Techniquespraveen_scribdNessuna valutazione finora
- Stresses and Strains (Part 1)Documento44 pagineStresses and Strains (Part 1)AMIE Study Circle, RoorkeeNessuna valutazione finora
- 2dof 1Documento122 pagine2dof 1wanpudinNessuna valutazione finora
- Ept474 2dofDocumento118 pagineEpt474 2dofLeon OoNessuna valutazione finora
- BMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemDocumento12 pagineBMM3533 - Two Degree of Freedom of Torsional Free Vibration SystemSyazaNessuna valutazione finora
- Structural Dynamics (CE 661)Documento25 pagineStructural Dynamics (CE 661)santoshNessuna valutazione finora
- MdofDocumento67 pagineMdofAnupam SonarNessuna valutazione finora
- Mechanical Vibrations Week 1Documento57 pagineMechanical Vibrations Week 1mrb87Nessuna valutazione finora
- Vibrations ME400Documento32 pagineVibrations ME400Nick MezaNessuna valutazione finora
- PB 3l VibrationDocumento8 paginePB 3l VibrationMuiz SaddozaiNessuna valutazione finora
- Chapter 14 SlidesDocumento40 pagineChapter 14 SlidessuperwebonNessuna valutazione finora
- Industry 4 0 and Lean Six Sigma Integration in Manufacturing A Literature Review An Integrated Framework and Proposed Research PerspectivesDocumento26 pagineIndustry 4 0 and Lean Six Sigma Integration in Manufacturing A Literature Review An Integrated Framework and Proposed Research PerspectivesPeter ParkerNessuna valutazione finora
- Dissertation Carolin PischlDocumento193 pagineDissertation Carolin PischlPeter ParkerNessuna valutazione finora
- 1 s2.0 S1877050921002982 MainDocumento10 pagine1 s2.0 S1877050921002982 MainPeter ParkerNessuna valutazione finora
- 1 s2.0 S1877050922002472 MainDocumento14 pagine1 s2.0 S1877050922002472 MainPeter ParkerNessuna valutazione finora
- Internal Combustion EnginesDocumento70 pagineInternal Combustion EnginesPeter ParkerNessuna valutazione finora
- Dynamic System Modelling and ControlDocumento761 pagineDynamic System Modelling and ControlDr-Nancy Ahmed100% (1)
- Mechanical Vibration IpDocumento10 pagineMechanical Vibration IpDeepak Dogra100% (1)
- Flex TheoryDocumento27 pagineFlex Theorymaliq12Nessuna valutazione finora
- Vibration Dampers - An Evolution in AustraliaDocumento12 pagineVibration Dampers - An Evolution in Australiaskc3128Nessuna valutazione finora
- Vibrations 7Documento6 pagineVibrations 7Egidius PutrandoNessuna valutazione finora
- WMO8 Ed2008 PartI Ch5 Up2010 enDocumento15 pagineWMO8 Ed2008 PartI Ch5 Up2010 eneliovcr1977Nessuna valutazione finora
- Ch-7 Non-Linear Seismic Response of StructuresDocumento37 pagineCh-7 Non-Linear Seismic Response of StructuresLoren McmahonNessuna valutazione finora
- Comparative Studies of Model Reference Adaptive Control SystemsDocumento10 pagineComparative Studies of Model Reference Adaptive Control SystemsAmir AmkaNessuna valutazione finora
- DSAToolsDocumento2 pagineDSAToolsShiva KumarNessuna valutazione finora
- Effect of Vibration On Solid-To-Liquid Transition in Small Granular Systems Under ShearDocumento8 pagineEffect of Vibration On Solid-To-Liquid Transition in Small Granular Systems Under ShearAeroDoc EvonyNessuna valutazione finora
- Unit 1 Oscillation, Ultrasonics and Dieletrical Material - Physic-1Documento16 pagineUnit 1 Oscillation, Ultrasonics and Dieletrical Material - Physic-1All About Youtuber'sNessuna valutazione finora
- CDTDocumento2 pagineCDTBalakrushna SahuNessuna valutazione finora
- Vibrations of Cantilever Beam (Continuous System)Documento15 pagineVibrations of Cantilever Beam (Continuous System)Weam Elsahar100% (1)
- PHYS205 Matlab Tutorial 2Documento4 paginePHYS205 Matlab Tutorial 2jacobNessuna valutazione finora
- BSCPH 103Documento277 pagineBSCPH 103suniy-at-of j&k100% (1)
- Control in LabVIEW PDFDocumento104 pagineControl in LabVIEW PDFJuan PabloNessuna valutazione finora
- Dynamic Analysis of Multi Component MooringDocumento17 pagineDynamic Analysis of Multi Component MooringlithiumabcNessuna valutazione finora
- HW 1Documento3 pagineHW 1bgybygNessuna valutazione finora
- Module 1Documento27 pagineModule 1Sunny SharmaNessuna valutazione finora
- IB Physics OscillationsDocumento38 pagineIB Physics OscillationsVidya Prab100% (1)
- MPE 442 - Mechanical Vibrations (2020)Documento95 pagineMPE 442 - Mechanical Vibrations (2020)Daniel MueniNessuna valutazione finora
- Damping FantasticDocumento20 pagineDamping FantastickapolaNessuna valutazione finora
- 1103 GBDocumento28 pagine1103 GBTien Hong DoNessuna valutazione finora
- Damping Resistor PDFDocumento3 pagineDamping Resistor PDFFarhan ShahNessuna valutazione finora
- MS ThesisDocumento180 pagineMS ThesisvinujohnpanickerNessuna valutazione finora
- ML12285A269 - SONGS - AREVA Executive ReportDocumento209 pagineML12285A269 - SONGS - AREVA Executive ReportEnformableNessuna valutazione finora
- Lina W3-Principles of VibrationDocumento16 pagineLina W3-Principles of VibrationNurul QurratuNessuna valutazione finora
- VelestDocumento31 pagineVelestTanaya WahengbamNessuna valutazione finora
- 400KV Circuit BreakerDocumento128 pagine400KV Circuit BreakerRamakrishna67% (3)