Potrebbero piacerti anche
- Construcción de Un Robot Híbrido v.1-3Documento76 pagineConstrucción de Un Robot Híbrido v.1-3Nicolas OtavoNessuna valutazione finora
- CatálogoAltronAD 45M3Documento4 pagineCatálogoAltronAD 45M3alex benditaNessuna valutazione finora
- Inf Ser R029 112016Documento154 pagineInf Ser R029 112016alex benditaNessuna valutazione finora
- Instalaciones Convencionales y NoDocumento9 pagineInstalaciones Convencionales y Noalex bendita0% (1)
- Catalogo MipDocumento34 pagineCatalogo MipfrancNessuna valutazione finora
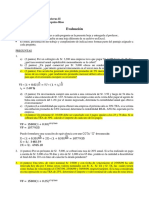
- Trabajo Evluacion No. 01 1 MAX3Documento2 pagineTrabajo Evluacion No. 01 1 MAX3alex benditaNessuna valutazione finora
- Guías Dirigidas Del Curso de Contabilidad 2 2013 - 1: Facultad de Ciencias EmpresarialesDocumento49 pagineGuías Dirigidas Del Curso de Contabilidad 2 2013 - 1: Facultad de Ciencias Empresarialesls maxNessuna valutazione finora
- 02 - Manual Software Sika Carbodur Aci440 (Sika Peru)Documento42 pagine02 - Manual Software Sika Carbodur Aci440 (Sika Peru)alex bendita100% (1)
- 795145Documento39 pagine795145JavierNessuna valutazione finora
- Implementacion de Un Sistema de Vision Artificial EmpleandoDocumento42 pagineImplementacion de Un Sistema de Vision Artificial EmpleandoBrayan Napa QuirozNessuna valutazione finora
- Manual Del Operador - RobotstudioDocumento588 pagineManual Del Operador - RobotstudioDCSAWNessuna valutazione finora
- LiteraturaDocumento7 pagineLiteraturaNicki PilasNessuna valutazione finora
- II Contitronic - Reglamento MicroMouse AmateurDocumento7 pagineII Contitronic - Reglamento MicroMouse AmateurELIAN ASTO MONTESNessuna valutazione finora
- Unidad Didáctica RoboticaDocumento52 pagineUnidad Didáctica RoboticaErikk HernandezNessuna valutazione finora
- La Robótica Educativa para El Aprendizaje de La GeometríaDocumento116 pagineLa Robótica Educativa para El Aprendizaje de La GeometríaGuillermo David Morales Valencia100% (1)
- Definición de Mano de Obra DirectaDocumento3 pagineDefinición de Mano de Obra Directakaren chaucaNessuna valutazione finora
- Texto 50an Oschile China Al Futuro FinalDocumento80 pagineTexto 50an Oschile China Al Futuro FinalZenda Dulkkamara Quiquincha GonzalezNessuna valutazione finora
- Tutorial RobodkDocumento16 pagineTutorial RobodkKelly Suyon VillarNessuna valutazione finora
- Control de Posicion Con ArduinoDocumento5 pagineControl de Posicion Con ArduinoMiguel Matuz100% (1)
- Revista Aer Nº6 - Mayo 2019Documento20 pagineRevista Aer Nº6 - Mayo 2019jose asuaNessuna valutazione finora
- Configuración de Un RobotDocumento2 pagineConfiguración de Un RobotJuanDavidVenturaFloresNessuna valutazione finora
- Sesion 1Documento57 pagineSesion 1Edgar Mauricio Lopez RojasNessuna valutazione finora
- Resumen Administracion - LIBRO LA METADocumento20 pagineResumen Administracion - LIBRO LA METAlesly estefany santamaria sandovalNessuna valutazione finora
- Case E1 E3Documento27 pagineCase E1 E3Estrella CamachoNessuna valutazione finora
- Linea Del Tiempo Equipo 4-Contexto Social-EV1Documento13 pagineLinea Del Tiempo Equipo 4-Contexto Social-EV1Javier VázquezNessuna valutazione finora
- Productividad OMAXDocumento14 pagineProductividad OMAXDannyHernandezFloresNessuna valutazione finora
- Cuentos KamishibaiDocumento106 pagineCuentos KamishibaiSandra Valenzuela GarridoNessuna valutazione finora
- Robotica Presentacion 11Documento17 pagineRobotica Presentacion 11juan diego guzman chalarcaNessuna valutazione finora
- Modulo 5 (Talleres) UndecimoDocumento31 pagineModulo 5 (Talleres) UndecimoLuis Fernando Soles AcostaNessuna valutazione finora
- Resumen TecnologiaDocumento5 pagineResumen TecnologiaAraceliZungriNessuna valutazione finora
- BA KR QUANTEC Nano EsDocumento175 pagineBA KR QUANTEC Nano EsCésar AtachauNessuna valutazione finora
- Ia para TodosDocumento63 pagineIa para TodosLuis QuitoNessuna valutazione finora
- Empresariales-Innovacion-Innovacion/ Endencias Empresariales y Tecnologías de Negocio para 2023Documento13 pagineEmpresariales-Innovacion-Innovacion/ Endencias Empresariales y Tecnologías de Negocio para 2023Dirección AculcoNessuna valutazione finora
- Diseño y Construcción de Un Robot TrepadorDocumento3 pagineDiseño y Construcción de Un Robot TrepadorJordy BravoNessuna valutazione finora
- 4 1 - 4 5-2-FuturizablesDocumento126 pagine4 1 - 4 5-2-FuturizablesErik CastellanosNessuna valutazione finora
- Cuadernilllo 2021 Tercer GradoDocumento45 pagineCuadernilllo 2021 Tercer GradoMaría Laura GoñiNessuna valutazione finora
- Cuarta Revolucion IndustrialDocumento2 pagineCuarta Revolucion IndustrialAngie MeyerlinNessuna valutazione finora