Potrebbero piacerti anche
- Checkpoint Services: Application Program InterfaceDocumento17 pagineCheckpoint Services: Application Program Interfacegame___overNessuna valutazione finora
- Maam Ss 0017Documento3 pagineMaam Ss 0017game___overNessuna valutazione finora
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsDocumento7 pagineOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overNessuna valutazione finora
- NS3 TutorialDocumento46 pagineNS3 TutorialahmedabdullaNessuna valutazione finora
- 05 Challenges of LTE Advance Rel10 13Documento75 pagine05 Challenges of LTE Advance Rel10 13game___overNessuna valutazione finora
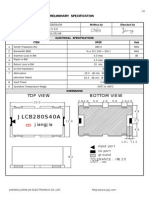
- J LCB280S 40A: Top View Bottom ViewDocumento2 pagineJ LCB280S 40A: Top View Bottom Viewgame___overNessuna valutazione finora
- Specification: 1. HousingDocumento2 pagineSpecification: 1. Housinggame___overNessuna valutazione finora
- 140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part NumberDocumento2 pagine140 MHZ Bandpass Filter 19.4 MHZ Bandwidth Sf0140Cf1Xxxxt: Part Numbergame___overNessuna valutazione finora
- J Lcl70A: Top View Bottom ViewDocumento2 pagineJ Lcl70A: Top View Bottom Viewgame___overNessuna valutazione finora
- J LCB140S 20A: Top View Bottom ViewDocumento2 pagineJ LCB140S 20A: Top View Bottom Viewgame___overNessuna valutazione finora
- Gaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZDocumento5 pagineGaas Ic 5 Bit Digital Attenuator 1 DB LSB Positive Control 0.5-2.5 GHZgame___overNessuna valutazione finora
- AD780Documento10 pagineAD780game___overNessuna valutazione finora
- AH1Documento6 pagineAH1game___overNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- H3C S9500E Series Routing Switches: IRF Configuration GuideDocumento59 pagineH3C S9500E Series Routing Switches: IRF Configuration Guidetintin42Nessuna valutazione finora
- What Is Computational Design?Documento19 pagineWhat Is Computational Design?Douglas Lopes de SouzaNessuna valutazione finora
- Mis Pepsico Project ReportDocumento63 pagineMis Pepsico Project ReportSheenam BhallaNessuna valutazione finora
- SOAS and Ministry of Defence, Freedom of Information ResponsesDocumento2 pagineSOAS and Ministry of Defence, Freedom of Information ResponsesDemilitarise SOASNessuna valutazione finora
- Petri Nets ManufacturingDocumento502 paginePetri Nets ManufacturingBentchikou Moh100% (1)
- Nitgen HamsterMouse Driver Installation For Fingerprint SensorsDocumento44 pagineNitgen HamsterMouse Driver Installation For Fingerprint SensorssamtrackNessuna valutazione finora
- The Assignment Problem Hungarian MethodDocumento1 paginaThe Assignment Problem Hungarian MethodRohan SinghNessuna valutazione finora
- WWW - Elspec.biz - PQSCADA - PQS User Manual SMX-0619-0102 V1.1Documento356 pagineWWW - Elspec.biz - PQSCADA - PQS User Manual SMX-0619-0102 V1.1Raul ZunigaNessuna valutazione finora
- Affect and Emotion in Human-Computer Interaction - From Theory To Aplications - Christian PeterC PDFDocumento250 pagineAffect and Emotion in Human-Computer Interaction - From Theory To Aplications - Christian PeterC PDFEstéfanoPietragallaNessuna valutazione finora
- BibType GuideDocumento3 pagineBibType GuidewankbassNessuna valutazione finora
- C Zentrix ManualDocumento134 pagineC Zentrix ManualPramod Pal100% (1)
- Manual: EnglishDocumento84 pagineManual: Englishjameel babooramNessuna valutazione finora
- Data Mining in Telecommunication - IndiaDocumento5 pagineData Mining in Telecommunication - Indialazaro maizNessuna valutazione finora
- HCNP-IERS Lab Guide V2.0July 212017 PDFDocumento506 pagineHCNP-IERS Lab Guide V2.0July 212017 PDFSaadi BadisNessuna valutazione finora
- Excel2013 SimpleFormulas PracticeDocumento4 pagineExcel2013 SimpleFormulas Practicejohn kingNessuna valutazione finora
- Sitecore Interview Questions PDFDocumento72 pagineSitecore Interview Questions PDFManjul JainNessuna valutazione finora
- 2G OptimizationDocumento38 pagine2G OptimizationVincent MassogueNessuna valutazione finora
- All Telnet CommandsDocumento7 pagineAll Telnet Commandssd0% (1)
- WASv7 Tuning Script Templates v1 1Documento12 pagineWASv7 Tuning Script Templates v1 1Pardhasaradhi KogantiNessuna valutazione finora
- RDPlus UGDocumento28 pagineRDPlus UGPrashant KotianNessuna valutazione finora
- OBIEE User's GuideDocumento1.060 pagineOBIEE User's GuideRăzvan CocârlăNessuna valutazione finora
- DFo 4 1Documento26 pagineDFo 4 1yogeyNessuna valutazione finora
- Siemens 05 Sinorix CompactDocumento2 pagineSiemens 05 Sinorix CompactmthuyaNessuna valutazione finora
- Finite Element Analysis A Primer by S. M. MusaDocumento473 pagineFinite Element Analysis A Primer by S. M. MusaAlfonso Moriñigo Aguado0% (1)
- Heuristic Search PDFDocumento226 pagineHeuristic Search PDF123away123Nessuna valutazione finora
- Chapter 8 Graph of FunctionsDocumento56 pagineChapter 8 Graph of FunctionsDugrand LutanNessuna valutazione finora
- Manually Install or Upgrade VMware Tools in A Linux Virtual Machine PDFDocumento2 pagineManually Install or Upgrade VMware Tools in A Linux Virtual Machine PDFOmar FigoNessuna valutazione finora
- HP-ALM-MSExcelAddin-UserGuide 11 0 1 15Documento28 pagineHP-ALM-MSExcelAddin-UserGuide 11 0 1 15douglas.dcmNessuna valutazione finora
- Research On The Application and Development TrendDocumento4 pagineResearch On The Application and Development TrendHectorNessuna valutazione finora
- PM C1001HC Documentation REV2.11Documento111 paginePM C1001HC Documentation REV2.11sashahadNessuna valutazione finora