International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 12 pp 832-834
March 2014
www.ijsret.org
ISSN 2278 0882
DC MOTOR SPEED CONTROL USING MATLAB
1
Assistant Professor,
1,2,3
J.Archana1, P.Suganthini2, C.Malathi3
Department of ICE, Saranathan College of Engineering, Trichy
ABSTRACT
II.
Speed control of DC Motor is vital in many
applications. In this paper, an effort has been made to
control the speed of the DC motor based on LabVIEW
(Laboratory
virtual
Instrument
Engineering
Workbench) program. LabVIEW provides a graphical
programming environment suited for high-level or
system-level design. By LabVIEW aided PID
controller, the parameter are adjusted to control the
motor speed. Design of controller by applying several
methods in analyzing controlled parameters to tune
parameter in order to obtain the best process response.
Tuning the parameters of the PID controller is done
using trial and error method by conducting simulation
on the system model using Mat lab package.
I.
MATHEMATICAL MODEL OF DC
MOTOR
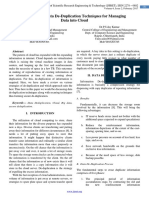
DC motor system is a separately excited DC motor,
which is often used to the velocity tuning and the
position adjustment. The equivalent circuit of the DC
motor using the armature voltage control method is
shown in figure1:
INTRODUCTION
DC Motor plays a fundamental role in research and
laboratory experiments because of their simplicity and
low cost. DC motor is a power actuator which converts
electrical energy into mechanical energy. There are
several types of applications where the load on the DC
motor varies over a speed range. The greatest
advantage of dc motors may be speed control. These
applications may demand high-speed control accuracy
and good dynamic responses. The term speed control
stand for intentional speed variation carried out
manually or mechanically. DC motors are most
suitable for ample range speed control and are
therefore used in many adjustable speed drives.
Because speed is directly proportional to armature
voltage and inversely proportional to magnetic flux
induced by the poles, adjusting the armature voltage or
the field current will vary the rotor speed. So, it is
important to make a controller to control the speed of
DC motor in desired speed. Proportional-IntegralDerivative (PID) controller has been used for several
decades in industries for process control applications.
At the same time PID controller has some
disadvantages namely; the undesirable speed exceed,
idle response and sensitivity The performance of this
controller depends on the precision of system models
and parameters. There are many algorithms/methods
proposed in literature for tuning of PID controller such
as Process reaction curve (Cohen-coon).
Fig 1: Equivalent Circuit of the Dc Motor
G (s)
kT
( S )
Ea ( S ) ( Las Ra )( Js B ) kbkT
Where
Ra : armature resistance ()
La : armature inductance (H)
Ia : armature current (A)
Ea : input voltage (V)
eb : back electromotive force (V)
Tm: motor torque (Nm)
: angular velocity of rotor (rad/s)
J : rotor inertia (kgm2)
B: friction constant (Nms/rad)
Kb: EMF constant (Vs/rad)
KT: torque constant (Nm/A)
Because the back EMF eb is proportional to speed
directly, hence
eb(t) = Kb
d (t ) K (t)
= b
dt
Making use of the KCL voltage law we can get
ea(t) = Raia(t) + La
dia (t )
dt
+ eb(t)
From Newton law, the motor torque can obtain
IJSRET @ 2014
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 12 pp 832-834
March 2014
ISSN 2278 0882
(KDs2 K p s KI )KT
d 2 (t )
d
Tm(t) = J
+B
= KTia(t)
2
dt
dt
La Js3 (Ra J BLa KD )s2 (Ra B Kb KT KP )s Kb KT
Taking Laplace transform, the above equations can
be formulated as follows:
Eb(s) = Kb(s)
Ea(s) =(Ra + Las)Ia(s) + Eb(s)
Tm(s) = B (s) + Js(s) = K TIa(s)
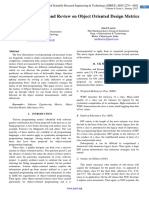
The DC motor armature control system functional
block diagram from equations (4) to (6) is shown in
Figure 2:
Figure 2: DC motor armature control system functional
block diagram.
The transfer function of DC motor speed with respect
to the input voltage can be written as follows,
G(s) =
www.ijsret.org
Many industrial applications use PID control to
maintain constant process variable. The output of PID
controllers (proportional- integrative- derivative
controllers) is a linear combination of the input, the
derivative of the input and the integral of the input
therefore it is widely used and enjoys significant
popularity, because of its simplicity, effectiveness and
robustness .Actually, the trial and error tuned PIDs
often perform in a non-optimal way. But even though
further fine tuning is possible and sometimes
necessary to provide a good starting point, their
usefulness is obvious when no model of the plant is
available and thus no analytic means of tuning a
controller exists. This method may also be used when a
model is known. In the work presented in this paper,
experimental investigation is carried out for the
appropriate tuning parameters of the PID controller
that governs the speed of a DC motor using Cohencoon method to obtain the best system response
achievable.
Once the value of process parameter are obtained, the
PID parameter can be calculated from the following
table
KT
( s )
=
E a ( s ) ( La s Ra )( Js B) K b K T
The relationship between the input e(t) and output u(t)
can be formulated in the following,
U(t) = Kpe(t) + KI
( )dt + KD
de(t )
dt
The transfer function is expressed as follows,
C(s) = Kp +
KI
U (s)
KDs
s
E (s)
The PID DC motor speed control system block
diagram is shown in Figure 4:
III.
MATLAB
MATLAB (MATrix LABoratory) is a tool for
numerical computation and visualization. The basic
data element is a matrix, so if you need a program that
manipulates array-based data it is generally fast to
write and run in MATLAB (unless you have very large
arrays or lots of computations, in which case youre
better off using C or Fortran)
Figure 3: PID DC motor speed control system block
diagram
IV.
The closed loop transfer function of DC motor speed
control system expresses as follows,
IJSRET @ 2014
ADVANTAGES
It allows quick and easy coding in a very highlevel language.
Rich data types: Complex number, Three
dimensional matrix, structure, cell array, etc
International Journal of Scientific Research Engineering & Technology (IJSRET)
Volume 2 Issue 12 pp 832-834
March 2014
Lots of nice functions and toolboxes:
fminsearch, fsolve, normcdf, norminv, etc; garch,
optimization, symbolic,
Lots of users: economists, mathematicians,
engineers,
High-quality graphics and visualization
facilities are available.
MATLAB M-files are completely portable
across a wide range of platforms.
EXTENSIVE documentation (type helpwin)
V.
www.ijsret.org
REFERENCES
[1]Ramu Krishnan, Electric motor drives:
modelling, analysis, and Control, Prentice Hall,
London, 2001.
[2] Brian R Copeland, The Design of PID Controllers
using Ziegler Nichols Tuning, (March 2008)
[3] PID Control of Continuous Processes by John W.
Webb Ronald A. Reis.
[4] K.P Ramachandran Control EngineeringWiley
Precise Textbook, 2011.
[5] PID Example: DC Motor Speed Control
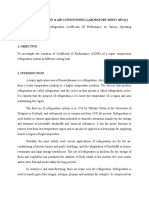
SIMULATION RESULTS
COMPARISION OF MPC WITH PID
CONTROLLER:
1.2
1
S
0.8
P
E 0.6
E 0.4
D
0.2
MPC
COHENCOON
0
0
CONTROLLER
50
TIME
100
150
PID
RISE
TIME
59
OVER
SHOOT
0.12
SETTLING
TIME
75
MPC
59
VI.
ISSN 2278 0882
CONCLUSION
In this paper PID controller is designed using
Matlab. Graphical representation of program gives us
clear understanding about the structure and data flow.
It is better for control application while MATLAB is
better for data manipulation. Execution time is better
in Matlab. So we use Matlab for DC motor speed
control. In this performance comparison of PID
controller with that of MPC controller is presented.
Performance comparison are simulated and studied.
The time response characteristics of the three systems
are analysed. The effectiveness of the PID controller
and MPC controller is evaluated in terms of
i. Rise-time
ii. Settling-time
IJSRET @ 2014
Potrebbero piacerti anche
- Speed Control of DC Motor Using Pid Controller Based On MatlabDocumento8 pagineSpeed Control of DC Motor Using Pid Controller Based On MatlabAlexander DeckerNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Simulation and Speed Control of Induction MotorDocumento76 pagineSimulation and Speed Control of Induction MotorNWALLL67% (3)
- Multilevel Inverters: Introduction and Emergent TopologiesDa EverandMultilevel Inverters: Introduction and Emergent TopologiesNessuna valutazione finora
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDocumento4 pagineStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretNessuna valutazione finora
- DC Motor Speed Control Using Fuzzy Logic Based On LabVIEWDocumento4 pagineDC Motor Speed Control Using Fuzzy Logic Based On LabVIEWSyed Shaik100% (1)
- Speed Control of DC Motor Under Varying Load Using PID ControllerDocumento11 pagineSpeed Control of DC Motor Under Varying Load Using PID ControllerAI Coordinator - CSC Journals100% (1)
- DC Motor Speed ...Documento68 pagineDC Motor Speed ...Yousif nasir100% (1)
- Special Electrical Machines Ee2403 PDFDocumento16 pagineSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Special Purpose Motors - Large FontsDocumento26 pagineSpecial Purpose Motors - Large FontsAnuradha SkaNessuna valutazione finora
- Closed Loop Control For A Brushless DC Motor To RuDocumento1 paginaClosed Loop Control For A Brushless DC Motor To RuscribsunilNessuna valutazione finora
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- MA-415 Industrial Drives Lab IndexDocumento19 pagineMA-415 Industrial Drives Lab IndexMayankJainNessuna valutazione finora
- Synchronous Motor Drive Control MethodsDocumento17 pagineSynchronous Motor Drive Control MethodssidharthNessuna valutazione finora
- EE - Power Electronics Short NotesDocumento34 pagineEE - Power Electronics Short NotesRavinder RangaNessuna valutazione finora
- Question Bank-EE2352 - Solid State DrivesDocumento4 pagineQuestion Bank-EE2352 - Solid State Drivesdgsgovind100% (1)
- Implementation of V/F Control of Three Phase Induction Motor Using MicrocontrollerDocumento60 pagineImplementation of V/F Control of Three Phase Induction Motor Using MicrocontrollerS Karan Nagar100% (4)
- Energy Audit Lab Experiments GuideDocumento23 pagineEnergy Audit Lab Experiments GuideNayandeep Gulhane100% (1)
- MP Electrical Drives Lab ManualDocumento37 pagineMP Electrical Drives Lab ManualSoumiya Srinivasan100% (1)
- Design and Implementation Speed Control System of PDFDocumento8 pagineDesign and Implementation Speed Control System of PDFvince kafuaNessuna valutazione finora
- Induction Motor Lab ManualDocumento11 pagineInduction Motor Lab ManualRabah ZaimeddineNessuna valutazione finora
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Documento6 pagineLab View Based Speed Control of DC Motor Using PID Controller-1582user01254Nessuna valutazione finora
- DC Motor Speed Control Using C++Documento77 pagineDC Motor Speed Control Using C++eraditya2001100% (11)
- Electric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, UttarakhandDocumento15 pagineElectric Drive Lab Laboratory Manual: Dev Bhoomi Institute Chakrata Road, Navgaoun Manduwala, Uttarakhandjaya mishraNessuna valutazione finora
- R05410204-Power System Operation and ControlDocumento6 pagineR05410204-Power System Operation and ControlSRINIVASA RAO GANTANessuna valutazione finora
- Electric DrivesDocumento2 pagineElectric DrivesnikunjNessuna valutazione finora
- Introduction To Control SystemsDocumento28 pagineIntroduction To Control SystemsAK MizanNessuna valutazione finora
- Chapter 3 Hydro Thermal SchedulingDocumento65 pagineChapter 3 Hydro Thermal Schedulingbik_mesiloveNessuna valutazione finora
- Power Electronics - 2 MARKSDocumento30 paginePower Electronics - 2 MARKSkarthik kumar50% (4)
- Single Phase H Bridge Multilevel InverterDocumento52 pagineSingle Phase H Bridge Multilevel Inverterskrtamil0% (1)
- Power Electronics Final Year EEE Projects 2018 2019Documento16 paginePower Electronics Final Year EEE Projects 2018 2019PannerNessuna valutazione finora
- Simultaneous Method Sequential MethodDocumento1 paginaSimultaneous Method Sequential MethodMohammedMujahed0% (1)
- Chapter ThreeDocumento67 pagineChapter Threeetayhailu80% (5)
- Sem QuestionsDocumento11 pagineSem QuestionsRojaNessuna valutazione finora
- Power Electronics Controlled RectificationDocumento13 paginePower Electronics Controlled Rectificationkibrom atsbhaNessuna valutazione finora
- DC Motor Speed Control PID Implementation Simulink PDFDocumento12 pagineDC Motor Speed Control PID Implementation Simulink PDFvince kafuaNessuna valutazione finora
- CEP Control System Sp2019V2Documento3 pagineCEP Control System Sp2019V2Ahmed AkramNessuna valutazione finora
- 200 - EE8552, EE6503 Power Electronics - Question Bank 3Documento119 pagine200 - EE8552, EE6503 Power Electronics - Question Bank 3NiteshNarukaNessuna valutazione finora
- Life Cycle Testing of Electrical Loads by Down CounterDocumento4 pagineLife Cycle Testing of Electrical Loads by Down CounterTRIAD TECHNO SERVICES50% (2)
- Control System Lab Manual 18EEL66Documento70 pagineControl System Lab Manual 18EEL66ADARSH SHINDE100% (1)
- Power Electronics NotesDocumento44 paginePower Electronics Notessameekshaa75% (4)
- Starting of Induction Motor Using PLCDocumento56 pagineStarting of Induction Motor Using PLCawadhesha20022033100% (3)
- MPPT Techniques ComparisonDocumento20 pagineMPPT Techniques ComparisonAdarsh Shetty100% (1)
- UNIT-V-Synchronous MachinesDocumento51 pagineUNIT-V-Synchronous Machinessujith100% (1)
- Simulation & Controlling of Brushless DC Motor Using PI/Fuzzy HybridDocumento4 pagineSimulation & Controlling of Brushless DC Motor Using PI/Fuzzy Hybridsunil kumarNessuna valutazione finora
- Chapter - 4: Synchronous Motor DrivesDocumento16 pagineChapter - 4: Synchronous Motor DrivesSuganthiVasan67% (3)
- Induction Motor BrakingDocumento26 pagineInduction Motor BrakingAshwini Singh100% (3)
- Short Term Hydro Thermal SchedulingDocumento30 pagineShort Term Hydro Thermal Schedulingrajendra_senapati67% (3)
- Power System Simulation Lab Manual - M.Tech (EPE) I Year I Sem& 2nd Sem - 2018Documento98 paginePower System Simulation Lab Manual - M.Tech (EPE) I Year I Sem& 2nd Sem - 2018Nikhil amirishettyNessuna valutazione finora
- MEC522: Control Engineering PBL AssignmentDocumento3 pagineMEC522: Control Engineering PBL Assignmentanisalyaa100% (1)
- Ee2301 - Power Electronics: Om SathiDocumento15 pagineEe2301 - Power Electronics: Om SathiNavneeth50% (6)
- Ybus Formation For Load Flow StudiesDocumento40 pagineYbus Formation For Load Flow Studiesgaurav100% (3)
- IISTE Journals Publication Nearest EditiDocumento8 pagineIISTE Journals Publication Nearest EditiNguyễn Hải ĐăngNessuna valutazione finora
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDocumento7 pagineSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupNessuna valutazione finora
- MATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GADocumento10 pagineMATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GApragatinareshNessuna valutazione finora
- Jeas 0408 94Documento7 pagineJeas 0408 94Jun Chee LimNessuna valutazione finora
- Ujca1 15000591Documento7 pagineUjca1 15000591Yang YingNessuna valutazione finora
- Speed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID ControllerDocumento7 pagineSpeed Control of A Real Time D.C. Shunt Motor Using SA Based Tuning of A PID Controllerprince1991kundraNessuna valutazione finora
- Wheelchair Stabilizing by Controlling The Speed Control of Its DC MotorDocumento5 pagineWheelchair Stabilizing by Controlling The Speed Control of Its DC Motorowais_36Nessuna valutazione finora
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocumento13 pagineA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENessuna valutazione finora
- Thermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue EngineeringDocumento5 pagineThermal Analysis On Characterization of Polycaprolactone (PCL) - Chitosan Scaffold For Tissue Engineeringijsret100% (1)
- A Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsDocumento7 pagineA Systematic Literature Review On Network Attacks, Classification and Models For Anomaly-Based Network Intrusion Detection SystemsijsretNessuna valutazione finora
- A Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkDocumento4 pagineA Review of Large-Scale RDF Document Processing in Hadoop MapReduce FrameworkijsretNessuna valutazione finora
- A Review On Natural Fibre Polymer CompositesDocumento6 pagineA Review On Natural Fibre Polymer CompositesijsretNessuna valutazione finora
- A Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkDocumento6 pagineA Review of Matrix Multiplication in Multicore Processor Using Interconnection NetworkijsretNessuna valutazione finora
- Source Identification For Anonymous Attacks With Deterministic Packet MarkingDocumento4 pagineSource Identification For Anonymous Attacks With Deterministic Packet MarkingijsretNessuna valutazione finora
- Design and Manufacture of Carbon-Free CarDocumento3 pagineDesign and Manufacture of Carbon-Free CarijsretNessuna valutazione finora
- Consruction of A Direct Solar Dryer For Perishable Farm ProductsDocumento9 pagineConsruction of A Direct Solar Dryer For Perishable Farm ProductsijsretNessuna valutazione finora
- A Review On Data De-Duplication Techniques For Managing Data Into CloudDocumento4 pagineA Review On Data De-Duplication Techniques For Managing Data Into CloudijsretNessuna valutazione finora
- An Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkDocumento6 pagineAn Augmented Anomaly-Based Network Intrusion Detection Systems Based On Neural NetworkijsretNessuna valutazione finora
- An Approach To Bug Triage: A ReviewDocumento4 pagineAn Approach To Bug Triage: A ReviewijsretNessuna valutazione finora
- Comparative Study and Review On Object Oriented Design MetricsDocumento4 pagineComparative Study and Review On Object Oriented Design MetricsijsretNessuna valutazione finora
- A Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentDocumento5 pagineA Distinct Method To Find The Critical Path and Total Float Under Fuzzy EnvironmentijsretNessuna valutazione finora
- Solving A Decision Making Problem Using Weighted Fuzzy Soft MatrixDocumento5 pagineSolving A Decision Making Problem Using Weighted Fuzzy Soft MatrixijsretNessuna valutazione finora
- CHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.Documento5 pagineCHANGES IN ANTI OXIDANT ENZYME ACTIVITIES IN Pseudomonas Syringae PV Syringae (BACTERIAL BROWN SPOT) INFECTED SEEDLINGS OF Vigna Radiata L.ijsretNessuna valutazione finora
- Echo Cancellation System in VOIP Using MATLABDocumento3 pagineEcho Cancellation System in VOIP Using MATLABijsretNessuna valutazione finora
- Mechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesDocumento6 pagineMechanical and Fracture Toughness Analysis of Woven Carbon Fibre Reinforced Epoxy CompositesijsretNessuna valutazione finora
- A Review On Fingerprint Detection and Recognization TechniquesDocumento4 pagineA Review On Fingerprint Detection and Recognization TechniquesijsretNessuna valutazione finora
- A Review On Face Detection and Recognization TechniquesDocumento4 pagineA Review On Face Detection and Recognization TechniquesijsretNessuna valutazione finora
- Augmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertDocumento8 pagineAugmentation Heat Transfer in A Circular Tube Using Conical Ring and Twisted Tape InsertijsretNessuna valutazione finora
- Comparative Study and Review On Object Oriented Design MetricsDocumento4 pagineComparative Study and Review On Object Oriented Design MetricsijsretNessuna valutazione finora
- Numerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapDocumento4 pagineNumerically Investigating Effects of Channel Angle, Friction and Ram Velocity On Strain Homogeneity in EcapijsretNessuna valutazione finora
- Automated Personalized Face Detection Using Viola DetectorDocumento5 pagineAutomated Personalized Face Detection Using Viola DetectorijsretNessuna valutazione finora
- Demographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtDocumento6 pagineDemographic Differences in Postgraduate Students' Attitudes and Use of ICT Facilities in Rivers State University of Science and Technology, Port HarcourtijsretNessuna valutazione finora
- Strategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaDocumento6 pagineStrategies of Effective Teaching and Learning Practical Skills in Technical and Vocational Training Programmes in NigeriaijsretNessuna valutazione finora
- Experimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationDocumento9 pagineExperimental Investigation and Numerical Simulation of Marble Dust Filled Aramid Fibre Reinforced Epoxy Composite For Wind Turbine Blade ApplicationijsretNessuna valutazione finora
- Blending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsDocumento11 pagineBlending Behavior of Cotton and Polyester Fibers On Different Spinning Systems in Relation To Physical Properties of Blended YarnsijsretNessuna valutazione finora
- Comparison of Workpiece Geometry and Its Effects On ECAP Process by FEADocumento5 pagineComparison of Workpiece Geometry and Its Effects On ECAP Process by FEAijsretNessuna valutazione finora
- Content Based Image Retrieval Using Color FeatureDocumento6 pagineContent Based Image Retrieval Using Color FeatureijsretNessuna valutazione finora
- Circular Tank Radius CalculationDocumento25 pagineCircular Tank Radius CalculationQamar AbbasNessuna valutazione finora
- Methods of Piling ExplainedDocumento3 pagineMethods of Piling ExplainedRajesh KhadkaNessuna valutazione finora
- Pivot Part NumDocumento2 paginePivot Part Numrossini_danielNessuna valutazione finora
- Method Statement For Cable & TerminationDocumento6 pagineMethod Statement For Cable & TerminationRajuNessuna valutazione finora
- bbk-lt2614-lt3214 Service Manual PDFDocumento42 paginebbk-lt2614-lt3214 Service Manual PDFrj arcinasNessuna valutazione finora
- Abstract Classes and Methods in Object Oriented ProgrammingDocumento13 pagineAbstract Classes and Methods in Object Oriented Programmingkishore1201Nessuna valutazione finora
- Attachment To Division Memorandum No. - , S, 2020Documento3 pagineAttachment To Division Memorandum No. - , S, 2020Jasmin Move-RamirezNessuna valutazione finora
- Piping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Documento3 paginePiping Class Sdxp10 - 1.4410 - (2507 Superduplex SS)Lucian GrigorasNessuna valutazione finora
- Android Car Navigation User ManualDocumento74 pagineAndroid Car Navigation User ManualРисте ПановNessuna valutazione finora
- Audio (Amplifier) - Electrical DiagnosticsDocumento195 pagineAudio (Amplifier) - Electrical DiagnosticsRafael CherechesNessuna valutazione finora
- CV Ali EzzeddineDocumento3 pagineCV Ali EzzeddineOmar RajadNessuna valutazione finora
- I) CentrifugesDocumento46 pagineI) Centrifugesiahim87Nessuna valutazione finora
- MyPower S3220&S3320-INSTALLATIONDocumento83 pagineMyPower S3220&S3320-INSTALLATIONJorge GonzalesNessuna valutazione finora
- Digital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions ManualDocumento27 pagineDigital Logic and Microprocessor Design With Interfacing 2nd Edition Hwang Solutions Manualdacdonaldnxv1zq100% (27)
- INFRARED BASED VISITOR COUNTER TECHNOLOGYDocumento21 pagineINFRARED BASED VISITOR COUNTER TECHNOLOGYRahul KumarNessuna valutazione finora
- NETWORK ANALYSIS Chap.8 TWO PORT NETWORK & NETWORK FUNCTIONS PDFDocumento34 pagineNETWORK ANALYSIS Chap.8 TWO PORT NETWORK & NETWORK FUNCTIONS PDFsudarshan poojaryNessuna valutazione finora
- RCE Unpacking Ebook (Translated by LithiumLi) - UnprotectedDocumento2.342 pagineRCE Unpacking Ebook (Translated by LithiumLi) - Unprotecteddryten7507Nessuna valutazione finora
- Atmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189Documento12 pagineAtmel 42238 Uart Based Sam Ba Bootloader For Sam d20 AP Note At04189manasaNessuna valutazione finora
- Library Management System Project ReportDocumento50 pagineLibrary Management System Project ReportSURAJ GAMINGNessuna valutazione finora
- L04-L05 Parts 13-25-550 v05 42021Documento84 pagineL04-L05 Parts 13-25-550 v05 42021Brandi HillNessuna valutazione finora
- AOE - FormDocumento8 pagineAOE - FormBimal GuptaNessuna valutazione finora
- Current Developments in Lens DesignDocumento12 pagineCurrent Developments in Lens DesignMahabub HossainNessuna valutazione finora
- Timeline of Programming Languages PDFDocumento11 pagineTimeline of Programming Languages PDFMohd Khir ZainunNessuna valutazione finora
- Waukesha Engine, Dresser, Inc. - Express Limited Warranty Covering Products Used in Continuous Duty ApplicationsDocumento6 pagineWaukesha Engine, Dresser, Inc. - Express Limited Warranty Covering Products Used in Continuous Duty ApplicationsLUISA FERNANDA TORRES MANOSALVANessuna valutazione finora
- RefrigerationDocumento11 pagineRefrigerationBroAmirNessuna valutazione finora
- DH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsDocumento2 pagineDH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsBình Quách HảiNessuna valutazione finora
- AMG ActuatorsDocumento12 pagineAMG ActuatorsMohan ArumugavallalNessuna valutazione finora
- Volume 1 Drafting Design and Presentation StandardsDocumento328 pagineVolume 1 Drafting Design and Presentation StandardsAntonio Herrera PérezNessuna valutazione finora
- PDF Saa6d140e 2 Seriespdf CompressDocumento8 paginePDF Saa6d140e 2 Seriespdf CompressNathawatNessuna valutazione finora
- Sitsyll PDFDocumento57 pagineSitsyll PDFpreranaNessuna valutazione finora