Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- 2018 ECE Annex III - ECE Course SpecificationsDocumento58 pagine2018 ECE Annex III - ECE Course SpecificationsAbril de VeraNessuna valutazione finora
- 2 Power Semiconductor DevicesDocumento24 pagine2 Power Semiconductor DevicesMaalmalan KeekiyyaaNessuna valutazione finora
- Bta08 8CWGDocumento1 paginaBta08 8CWGIrwantoirwanNessuna valutazione finora
- 01 Introduction To Digital Control SystemDocumento10 pagine01 Introduction To Digital Control SystemAbril de VeraNessuna valutazione finora
- Bipolar Junction Transistor DC BiasingDocumento6 pagineBipolar Junction Transistor DC BiasingAbril de VeraNessuna valutazione finora
- Ultimate UPCAT Prep Ebook 2 PDFDocumento235 pagineUltimate UPCAT Prep Ebook 2 PDFnabixxiNessuna valutazione finora
- Professional Electronics Engineer Guidelines For Applicants: Applicant' S ChecklistDocumento9 pagineProfessional Electronics Engineer Guidelines For Applicants: Applicant' S Checklistjj012586Nessuna valutazione finora
- Digital vs. Analog Control SystemsDocumento33 pagineDigital vs. Analog Control SystemsAbril de Vera100% (1)
- Making A Line Sensor Using IR ReceiverDocumento6 pagineMaking A Line Sensor Using IR ReceiverAbril de VeraNessuna valutazione finora
- AVR ATmega8 Based LFR - Differential DriveDocumento8 pagineAVR ATmega8 Based LFR - Differential DriveAbril de VeraNessuna valutazione finora
- Ch2 Coulomb's LawDocumento44 pagineCh2 Coulomb's Lawmehdii.heidary136686% (7)
- City of EmberDocumento1 paginaCity of EmberAbril de VeraNessuna valutazione finora
- ECE Laws and Ethis Quiz 1Documento3 pagineECE Laws and Ethis Quiz 1Abril de VeraNessuna valutazione finora
- Breadboard BasicsDocumento11 pagineBreadboard BasicsAbril de Vera0% (1)
- Circuits 2 2nd QuizDocumento2 pagineCircuits 2 2nd QuizAbril de VeraNessuna valutazione finora
- Electric Field and Coulombs LawDocumento2 pagineElectric Field and Coulombs LawAbril de VeraNessuna valutazione finora
- Antenna Introduction & BasicsDocumento8 pagineAntenna Introduction & BasicsA_DarkoNessuna valutazione finora
- Multisim 10 Component Reference GuideDocumento450 pagineMultisim 10 Component Reference Guideredoctober24100% (2)
- Characteristic TablesDocumento12 pagineCharacteristic TablesAbril de VeraNessuna valutazione finora
- FET Basics 1Documento63 pagineFET Basics 1Juno Hera Magallanes HuyanNessuna valutazione finora
- Modeling in The Frequency DomainDocumento71 pagineModeling in The Frequency DomainAbril de VeraNessuna valutazione finora
- Suggested Topics For ReviewDocumento2 pagineSuggested Topics For ReviewAbril de VeraNessuna valutazione finora
- Self EsteemDocumento3 pagineSelf EsteemAbril de VeraNessuna valutazione finora
- Voltage Multiplier LabDocumento2 pagineVoltage Multiplier LabPercivalEgauNessuna valutazione finora
- MQL5 Reference ManualDocumento4.108 pagineMQL5 Reference ManualmardukkerNessuna valutazione finora
- The New National Building Code and Ra9292Documento2 pagineThe New National Building Code and Ra9292Abril de VeraNessuna valutazione finora
- Responsible Adulthood Through Bullying AwarenessDocumento41 pagineResponsible Adulthood Through Bullying AwarenessAbril de VeraNessuna valutazione finora
- Fourier Series: Advanced Engineering MathematicsDocumento6 pagineFourier Series: Advanced Engineering MathematicsAbril de VeraNessuna valutazione finora
- Junction Field Effect TransistorDocumento3 pagineJunction Field Effect TransistorAbril de VeraNessuna valutazione finora
- Junction Field Effect TransistorDocumento3 pagineJunction Field Effect TransistorAbril de VeraNessuna valutazione finora
- Objectives For Gaussian EliminationDocumento1 paginaObjectives For Gaussian EliminationAbril de VeraNessuna valutazione finora
- Complete Manual For AVR Multi-Tester Version 1.12kDocumento128 pagineComplete Manual For AVR Multi-Tester Version 1.12kBenjamin Dover100% (1)
- Basic Electronic Circuits Explained - Beginner's Guide To Electronics - Homemade Circuit ProjectsDocumento85 pagineBasic Electronic Circuits Explained - Beginner's Guide To Electronics - Homemade Circuit ProjectsJuan fernando RoldanNessuna valutazione finora
- Commutation Circuits PDFDocumento2 pagineCommutation Circuits PDFRalphNessuna valutazione finora
- DB3 DB4 SMDB3 - Diac PDFDocumento6 pagineDB3 DB4 SMDB3 - Diac PDFmsicoie1851Nessuna valutazione finora
- Mac224 10Documento5 pagineMac224 10Antonio de los MonterosNessuna valutazione finora
- BTA316X Series B, C and E - DatasheetDocumento13 pagineBTA316X Series B, C and E - DatasheetNoemiaNessuna valutazione finora
- SdadsfDocumento15 pagineSdadsfMizhar GerardoNessuna valutazione finora
- Light DimmerDocumento3 pagineLight DimmerragaNessuna valutazione finora
- Philips Component PDFDocumento34 paginePhilips Component PDFVivek DixitNessuna valutazione finora
- Triacs MAC210 Series MAC210A Series: Silicon Bidirectional ThyristorsDocumento4 pagineTriacs MAC210 Series MAC210A Series: Silicon Bidirectional ThyristorsgowataNessuna valutazione finora
- Gefran SSRDocumento24 pagineGefran SSRmirko02Nessuna valutazione finora
- An Golden RulesDocumento11 pagineAn Golden RulesRakesh KulkarniNessuna valutazione finora
- EP2596680B1Documento28 pagineEP2596680B1ErockNessuna valutazione finora
- Maint. Solar Equip. Tools ListDocumento6 pagineMaint. Solar Equip. Tools ListcoolrajeeeNessuna valutazione finora
- MK-328 Tr/lcr/esrDocumento10 pagineMK-328 Tr/lcr/esrVictor TettehNessuna valutazione finora
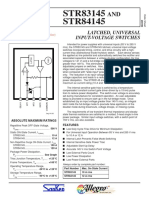
- STR83145 STR84145: Latched, Universal Input-Voltage SwitchesDocumento8 pagineSTR83145 STR84145: Latched, Universal Input-Voltage SwitchesErnandesTorresBarbosaNessuna valutazione finora
- ft01 PDFDocumento4 pagineft01 PDFFernando Escobares100% (1)
- U217BDocumento11 pagineU217BAnonymous JR1LSmN0sNessuna valutazione finora
- BTA24 / BTB24 TO-220 Triac Series: Continental Device India LimitedDocumento2 pagineBTA24 / BTB24 TO-220 Triac Series: Continental Device India LimitedRi Cha RdNessuna valutazione finora
- Manual Tester Componentes T7Documento1 paginaManual Tester Componentes T7Manu NNessuna valutazione finora
- Thyristors & IGBT Circuit ApplicationsDocumento10 pagineThyristors & IGBT Circuit ApplicationsKatz CaindoyNessuna valutazione finora
- Speed Control of Ac Motor Using TriacDocumento2 pagineSpeed Control of Ac Motor Using TriacHarshaNessuna valutazione finora
- Construction of A TriacDocumento9 pagineConstruction of A TriacRenz DalitNessuna valutazione finora
- Industrial ElectronicsDocumento7 pagineIndustrial ElectronicsKarl Vincent BebingNessuna valutazione finora
- Integral Cycle Speed Control of Single Phase Induction Motor Using At89c51 Microcontroller PDFDocumento47 pagineIntegral Cycle Speed Control of Single Phase Induction Motor Using At89c51 Microcontroller PDFrijilpoothadiNessuna valutazione finora
- Xpo CTDocumento9 pagineXpo CTBambang GastomoNessuna valutazione finora
- Light Dimmer CircuitsDocumento14 pagineLight Dimmer CircuitskapilasriNessuna valutazione finora
- CA3059Documento13 pagineCA3059Luis Miguel BarrenoNessuna valutazione finora