Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Service Manual: ForewordDocumento2.364 pagineService Manual: ForewordredNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Price ListDocumento519 paginePrice Listabrar nurtata100% (1)
- Electricity Y3 2Documento172 pagineElectricity Y3 2Rex Chambers LadaoNessuna valutazione finora
- Method Statement For Piping Tie-In Sleeper Jetty 5 Area - POWERTECH PKG SMP#5 - Rev.00CrevisiDocumento198 pagineMethod Statement For Piping Tie-In Sleeper Jetty 5 Area - POWERTECH PKG SMP#5 - Rev.00CrevisiJohnNessuna valutazione finora
- Proposal Product Range Awak Mas + ProposalDocumento124 pagineProposal Product Range Awak Mas + ProposalJoshwa SimamoraNessuna valutazione finora
- Manual de Motores Vol 4Documento75 pagineManual de Motores Vol 4Gabriel Piñon Conde100% (1)
- Wistron Mockingbird AMD 19852Documento106 pagineWistron Mockingbird AMD 19852Cesar Morales100% (1)
- 2301D and 2301D-EC Digital Load Sharing and Speed Controls For EnginesDocumento148 pagine2301D and 2301D-EC Digital Load Sharing and Speed Controls For EnginesJoe D'AmatoNessuna valutazione finora
- Using Voltage Supervisors With Picmicro Microcontroller Systems Which Implement In-Circuit Serial Programming™Documento8 pagineUsing Voltage Supervisors With Picmicro Microcontroller Systems Which Implement In-Circuit Serial Programming™opamp2000Nessuna valutazione finora
- Marcy Home Gym Apex: Model Apex Retain This Manual For ReferenceDocumento16 pagineMarcy Home Gym Apex: Model Apex Retain This Manual For Referencetata12343Nessuna valutazione finora
- FC GMDSS en eDocumento4 pagineFC GMDSS en eStevien HendryanNessuna valutazione finora
- AIR Conditioner: Owner'S ManualDocumento31 pagineAIR Conditioner: Owner'S Manualnoriko5463Nessuna valutazione finora
- MF-10 Recommendable Lub. Oil ListDocumento22 pagineMF-10 Recommendable Lub. Oil ListpcatruongNessuna valutazione finora
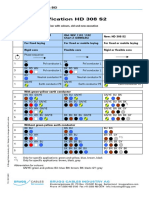
- BCIAG Info HD308S2 en 18 PDFDocumento1 paginaBCIAG Info HD308S2 en 18 PDFBacamarteNessuna valutazione finora
- Anti Sleep Alarm RDocumento31 pagineAnti Sleep Alarm RPrints Bindings100% (1)
- Dell Thunderbolt Dock wd19tbs Data Sheet - Pdf.externalDocumento5 pagineDell Thunderbolt Dock wd19tbs Data Sheet - Pdf.externalAndre Ant WilliamsNessuna valutazione finora
- JustificationDocumento2 pagineJustificationMarcialNessuna valutazione finora
- Spare Parts MP25Documento49 pagineSpare Parts MP25roccosoze78Nessuna valutazione finora
- Abb CL-LMRDocumento296 pagineAbb CL-LMRInajá FerreiraNessuna valutazione finora
- Accelnet Micro Module CANopen-ACK-Datasheet-Datasheet PDFDocumento25 pagineAccelnet Micro Module CANopen-ACK-Datasheet-Datasheet PDFAlan Barreras GastelumNessuna valutazione finora
- Aptio V Status CodesDocumento13 pagineAptio V Status CodesKevin TateNessuna valutazione finora
- Breaker Failure Protection RAICADocumento8 pagineBreaker Failure Protection RAICAGeorge AsuncionNessuna valutazione finora
- STS 6 PulleyDocumento6 pagineSTS 6 PulleyDebbieNessuna valutazione finora
- MAN 05 003 01 Service Manual MC 3 6Documento2 pagineMAN 05 003 01 Service Manual MC 3 6pabloNessuna valutazione finora
- LED VideowallDocumento11 pagineLED VideowallIvan AphoninNessuna valutazione finora
- Utdrag Dunstabzug AnleitungDocumento52 pagineUtdrag Dunstabzug AnleitungdjokanomcaNessuna valutazione finora
- Flyback Transformer Leakage Inductance, Part 1: by Dennis L FeuchtDocumento0 pagineFlyback Transformer Leakage Inductance, Part 1: by Dennis L FeuchtfuzakaNessuna valutazione finora
- TG-4506 - Flag 6 CablesDocumento38 pagineTG-4506 - Flag 6 CablesJason SecretNessuna valutazione finora
- Zetex Vari Cap DiodesDocumento12 pagineZetex Vari Cap Diodespeter3972Nessuna valutazione finora
- Install A Crisscross With Any Leg Vise Hardware, Begin HereDocumento24 pagineInstall A Crisscross With Any Leg Vise Hardware, Begin Herexx xxxNessuna valutazione finora