Potrebbero piacerti anche
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- How To Text A Girl - A Girls Chase Guide (Girls Chase Guides) (PDFDrive) - 31-61Documento31 pagineHow To Text A Girl - A Girls Chase Guide (Girls Chase Guides) (PDFDrive) - 31-61Myster HighNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Oxgen Sensor Cat WEBDocumento184 pagineOxgen Sensor Cat WEBBuddy Davis100% (2)
- Financial Analysis of Wipro LTDDocumento101 pagineFinancial Analysis of Wipro LTDashwinchaudhary89% (18)
- Guide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFDocumento20 pagineGuide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFLars VonTurboNessuna valutazione finora
- Ece Viii Wireless Communication (10ec81) NotesDocumento108 pagineEce Viii Wireless Communication (10ec81) NotesDeepak Salian0% (1)
- 100 Training Games - Kroehnert, GaryDocumento180 pagine100 Training Games - Kroehnert, GarywindsorccNessuna valutazione finora
- New Hire WorkbookDocumento40 pagineNew Hire WorkbookkNessuna valutazione finora
- Dell Compellent Sc4020 Deploy GuideDocumento184 pagineDell Compellent Sc4020 Deploy Guidetar_py100% (1)
- Speed Reducer GearboxDocumento14 pagineSpeed Reducer Gearboxعبد للهNessuna valutazione finora
- Form Active Structure TypesDocumento5 pagineForm Active Structure TypesShivanshu singh100% (1)
- Photosynthesis Lab ReportDocumento7 paginePhotosynthesis Lab ReportTishaNessuna valutazione finora
- 4 Influencing Factors of Learners Career Choice Parents Choice Vs Personal DescisionDocumento24 pagine4 Influencing Factors of Learners Career Choice Parents Choice Vs Personal Descisionmatteo mamaloNessuna valutazione finora
- Engineering 5Documento20 pagineEngineering 5Deepak SalianNessuna valutazione finora
- 1083796829-Preview File - Engineer Tech Support Level - 1 FGDocumento16 pagine1083796829-Preview File - Engineer Tech Support Level - 1 FGanaparthi naveenNessuna valutazione finora
- Technical Support User GuideDocumento13 pagineTechnical Support User GuideDeepak SalianNessuna valutazione finora
- Seatmatrix EnggDocumento6 pagineSeatmatrix EnggHarshith LaxmanNessuna valutazione finora
- Maths Set 2 EnglishDocumento8 pagineMaths Set 2 EnglishDeepak SalianNessuna valutazione finora
- Jain College: Date: Dec-2017 Subject: Statistics I Puc Mock Timings Allowed: 3Hrs. Total Marks: 100Documento4 pagineJain College: Date: Dec-2017 Subject: Statistics I Puc Mock Timings Allowed: 3Hrs. Total Marks: 100Deepak SalianNessuna valutazione finora
- Jan 2014Documento2 pagineJan 2014Deepak SalianNessuna valutazione finora
- Aptitude2015 PDFDocumento50 pagineAptitude2015 PDFmanjus46Nessuna valutazione finora
- Visvesvaraya Technological University, BelagaviDocumento29 pagineVisvesvaraya Technological University, BelagaviRaghavendra ShettyNessuna valutazione finora
- Ectc 4 SyllDocumento18 pagineEctc 4 SyllDeepak SalianNessuna valutazione finora
- Anual Modern Digital Signal Processing by Roberto Christ IDocumento187 pagineAnual Modern Digital Signal Processing by Roberto Christ IDeepak SalianNessuna valutazione finora
- Spin Tronic SDocumento28 pagineSpin Tronic SDeepak SalianNessuna valutazione finora
- Revised Power Electronics Lab Manual 26.11.14Documento46 pagineRevised Power Electronics Lab Manual 26.11.14Deepak SalianNessuna valutazione finora
- Cse Ade Lab Manual 2016Documento70 pagineCse Ade Lab Manual 2016Deepak SalianNessuna valutazione finora
- Cse Ade Lab Manual 2016Documento70 pagineCse Ade Lab Manual 2016AnnalakshmiNessuna valutazione finora
- Cse Ade Lab Manual 2016Documento70 pagineCse Ade Lab Manual 2016Deepak SalianNessuna valutazione finora
- Choice Based Credit System (CBCS) Regulations Governing The Degree of Bachelor of Engineering / Technology (B.E./B.Tech.)Documento16 pagineChoice Based Credit System (CBCS) Regulations Governing The Degree of Bachelor of Engineering / Technology (B.E./B.Tech.)Deepak SalianNessuna valutazione finora
- Na Lesson PlanDocumento4 pagineNa Lesson PlanDeepak SalianNessuna valutazione finora
- Guidelines CSS ScholarshipDocumento15 pagineGuidelines CSS Scholarshipmoorthymtps_54120305Nessuna valutazione finora
- DC Assignment09 PDFDocumento3 pagineDC Assignment09 PDFDeepak SalianNessuna valutazione finora
- DC Assignment09 PDFDocumento3 pagineDC Assignment09 PDFDeepak SalianNessuna valutazione finora
- Behavioral InterviewDocumento4 pagineBehavioral InterviewDeepak SalianNessuna valutazione finora
- RRR 1Documento3 pagineRRR 1Deepak SalianNessuna valutazione finora
- Milling GrindingDocumento16 pagineMilling GrindingDeepak SalianNessuna valutazione finora
- Celebrating International Women's Day achievementsDocumento1 paginaCelebrating International Women's Day achievementsDeepak SalianNessuna valutazione finora
- Miniature Robotic Hand For Object DisposalDocumento16 pagineMiniature Robotic Hand For Object DisposalDeepak SalianNessuna valutazione finora
- Ofdm Example TipsDocumento7 pagineOfdm Example TipsDeepak SalianNessuna valutazione finora
- 1st SemDocumento3 pagine1st SemARUPARNA MAITYNessuna valutazione finora
- SolBridge Application 2012Documento14 pagineSolBridge Application 2012Corissa WandmacherNessuna valutazione finora
- Nokia CaseDocumento28 pagineNokia CaseErykah Faith PerezNessuna valutazione finora
- Worksheet 5 Communications and Privacy: Unit 6 CommunicationDocumento3 pagineWorksheet 5 Communications and Privacy: Unit 6 Communicationwh45w45hw54Nessuna valutazione finora
- SDS OU1060 IPeptideDocumento6 pagineSDS OU1060 IPeptideSaowalak PhonseeNessuna valutazione finora
- Hydraulics Engineering Course OverviewDocumento35 pagineHydraulics Engineering Course Overviewahmad akramNessuna valutazione finora
- Breaking NewsDocumento149 pagineBreaking NewstigerlightNessuna valutazione finora
- LEARNING ACTIVITY Sheet Math 7 q3 M 1Documento4 pagineLEARNING ACTIVITY Sheet Math 7 q3 M 1Mariel PastoleroNessuna valutazione finora
- ITP Exam SuggetionDocumento252 pagineITP Exam SuggetionNurul AminNessuna valutazione finora
- Trillium Seismometer: User GuideDocumento34 pagineTrillium Seismometer: User GuideDjibril Idé AlphaNessuna valutazione finora
- OS LabDocumento130 pagineOS LabSourav BadhanNessuna valutazione finora
- Pasadena Nursery Roses Inventory ReportDocumento2 paginePasadena Nursery Roses Inventory ReportHeng SrunNessuna valutazione finora
- Chromate Free CoatingsDocumento16 pagineChromate Free CoatingsbaanaadiNessuna valutazione finora
- Baobab MenuDocumento4 pagineBaobab Menuperseverence mahlamvanaNessuna valutazione finora
- Paper SizeDocumento22 paginePaper SizeAlfred Jimmy UchaNessuna valutazione finora
- Mpu 2312Documento15 pagineMpu 2312Sherly TanNessuna valutazione finora
- An Introduction To Ecology and The BiosphereDocumento54 pagineAn Introduction To Ecology and The BiosphereAndrei VerdeanuNessuna valutazione finora
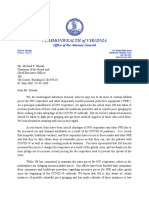
- Letter From Attorneys General To 3MDocumento5 pagineLetter From Attorneys General To 3MHonolulu Star-AdvertiserNessuna valutazione finora