Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Tech Tip: How To Test For An Alternator Voltage DropDocumento2 pagineTech Tip: How To Test For An Alternator Voltage DropainginerNessuna valutazione finora
- Al-Farabi The Theory of Emanation and THDocumento14 pagineAl-Farabi The Theory of Emanation and THManuel Ricardo Fernandes SoaresNessuna valutazione finora
- SWT 2 3 101 Brochure.Documento8 pagineSWT 2 3 101 Brochure.Uhrin ImreNessuna valutazione finora
- Sam W Hoke Torch PatentDocumento5 pagineSam W Hoke Torch PatentRichard.nlNessuna valutazione finora
- BasCal (1st Long Exam Reviewer)Documento23 pagineBasCal (1st Long Exam Reviewer)Ethan Erika BionaNessuna valutazione finora
- 978 0883850305Documento421 pagine978 0883850305Douglas CamposNessuna valutazione finora
- ANFISDocumento19 pagineANFISShimaa Barakat100% (1)
- Welding Symbols & Weld PreparationsDocumento54 pagineWelding Symbols & Weld PreparationsAmirtha Thiyagaraajan AlagesanNessuna valutazione finora
- Survey CE1011Documento34 pagineSurvey CE1011san htet aung100% (3)
- DI CaseletesDocumento9 pagineDI Caseletessprem4353Nessuna valutazione finora
- NewDocumento3 pagineNewShreyanshu KodilkarNessuna valutazione finora
- Woodworking Plans - Childs RockerDocumento16 pagineWoodworking Plans - Childs RockerBob Kowalski100% (1)
- Chloride LINEAR MK II - Service ManualDocumento32 pagineChloride LINEAR MK II - Service Manualfabio.perazzoloNessuna valutazione finora
- Assigment Sheet Tast 2 Aina MardianaDocumento10 pagineAssigment Sheet Tast 2 Aina MardianaAina MardianaNessuna valutazione finora
- Properties of Gray Cast Iron - Engineer's HandbookDocumento2 pagineProperties of Gray Cast Iron - Engineer's Handbookkus satria dNessuna valutazione finora
- How Torque Converters Work - HowStuffWorksDocumento7 pagineHow Torque Converters Work - HowStuffWorksKrishanu ModakNessuna valutazione finora
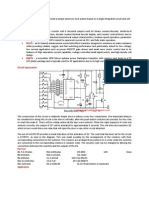
- Electronic Door LockDocumento2 pagineElectronic Door LocktaindiNessuna valutazione finora
- PDFDocumento1 paginaPDFdhaktodesatyajitNessuna valutazione finora
- TRM Reb670Documento490 pagineTRM Reb670jayapalNessuna valutazione finora
- AutoCAD - Modify ToolbarDocumento18 pagineAutoCAD - Modify ToolbarMarcusNessuna valutazione finora
- Three Way Conference Template 2019Documento4 pagineThree Way Conference Template 2019api-313701922Nessuna valutazione finora
- Experiment 3: Department of Civil Engineering, IIT DelhiDocumento2 pagineExperiment 3: Department of Civil Engineering, IIT DelhiSRNessuna valutazione finora
- Wea Met Aws310 Brochure 210x280 B211290en C Low v2Documento4 pagineWea Met Aws310 Brochure 210x280 B211290en C Low v2Anonymous rpSGuQPNessuna valutazione finora
- Microwave Mini ProjectDocumento21 pagineMicrowave Mini Projectfaizan4033Nessuna valutazione finora
- Experiment 1Documento6 pagineExperiment 1srinathlalNessuna valutazione finora
- V-Belt Sizing and Selection Guide: Standard V Belt Sizes FHP (Fractional Horsepower) V-Belts 3L, 4L, 5LDocumento1 paginaV-Belt Sizing and Selection Guide: Standard V Belt Sizes FHP (Fractional Horsepower) V-Belts 3L, 4L, 5LVijay ParmarNessuna valutazione finora
- JCrenshaw ImplementingCRCsDocumento17 pagineJCrenshaw ImplementingCRCsspyeagleNessuna valutazione finora
- Mechanics of Solids by Crandall, Dahl, Lardner, 2nd ChapterDocumento118 pagineMechanics of Solids by Crandall, Dahl, Lardner, 2nd Chapterpurijatin100% (2)
- 10 - Starting and ReversingDocumento4 pagine10 - Starting and ReversingAisha Zaheer100% (3)
- Random Sampling - QuizizzDocumento7 pagineRandom Sampling - Quizizzmacjoven101Nessuna valutazione finora