Potrebbero piacerti anche
- Estructuras de Construcción - V.N. BaykovDocumento362 pagineEstructuras de Construcción - V.N. BaykovJahdiel100% (3)
- Cuadro Pruebas SupraliminaresDocumento5 pagineCuadro Pruebas SupraliminaresBárbara Maria Ignacia VásquezNessuna valutazione finora
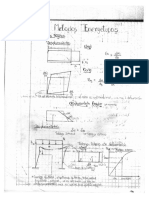
- Apuntes de Hipesestaticas IDocumento29 pagineApuntes de Hipesestaticas IJahdielNessuna valutazione finora
- Callisaya Corsino Jimmy Osmar - 18 Oct 2019Documento139 pagineCallisaya Corsino Jimmy Osmar - 18 Oct 2019JahdielNessuna valutazione finora
- Quenallata Coyauri Julio - 18 Oct 2019Documento201 pagineQuenallata Coyauri Julio - 18 Oct 2019JahdielNessuna valutazione finora
- Nava Chambi Miguel Angel - 21 Oct 2019Documento190 pagineNava Chambi Miguel Angel - 21 Oct 2019JahdielNessuna valutazione finora
- Reporte Fotografico-Aforo de Trafico VehicularDocumento3 pagineReporte Fotografico-Aforo de Trafico VehicularJahdielNessuna valutazione finora
- Analisis EstructuralDocumento624 pagineAnalisis EstructuralJahdiel100% (1)
- Geologia AplicadaDocumento81 pagineGeologia Aplicadaeves_25h100% (3)
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 pagineTema 3 Estabilidad de Laderas Bloque IIJoel SolanoNessuna valutazione finora
- Ejercicios CimentacionesDocumento14 pagineEjercicios CimentacionesGerardo Solorzano100% (1)
- Computacion para Ingenieria-UMSSDocumento320 pagineComputacion para Ingenieria-UMSSAlexis Manuel Torrez Fernandez100% (1)
- Tema 1 ConsolidacionDocumento51 pagineTema 1 Consolidacionmmjmzxc100% (1)
- Dosificacion Jimenez MontoyaDocumento20 pagineDosificacion Jimenez MontoyaJahdiel100% (1)
- Formulario Reconoc. Trayectoria ProfesionalDocumento2 pagineFormulario Reconoc. Trayectoria ProfesionalJahdielNessuna valutazione finora
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 pagineTema 5 - Muros y Pantallas Bloque I PDFJahdielNessuna valutazione finora
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 pagineTema 5 - Muros y Pantallas Bloque I PDFJahdielNessuna valutazione finora
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 pagineTema 3 Estabilidad de Laderas Bloque IIJoel SolanoNessuna valutazione finora
- Aeropuertozaragoza Es 4346Documento4 pagineAeropuertozaragoza Es 4346JahdielNessuna valutazione finora
- Tema 5 - Muros y Pantallas Bloque I PDFDocumento45 pagineTema 5 - Muros y Pantallas Bloque I PDFJahdielNessuna valutazione finora
- Tema 3 Estabilidad de Laderas Bloque IIDocumento94 pagineTema 3 Estabilidad de Laderas Bloque IIJoel SolanoNessuna valutazione finora
- Resumen CurricularDocumento4 pagineResumen CurricularMirko Flores JimenezNessuna valutazione finora
- Tema 1 ConsolidacionDocumento51 pagineTema 1 Consolidacionmmjmzxc100% (1)
- Alberche Es 4349Documento15 pagineAlberche Es 4349JahdielNessuna valutazione finora
- Diseño de Puentes Estribos y Pilas - UmssDocumento49 pagineDiseño de Puentes Estribos y Pilas - UmssAndrew Vargas Condarco100% (5)
- 05pilotes en Suelos GranularesDocumento19 pagine05pilotes en Suelos GranularesRudi Maslucan del CastilloNessuna valutazione finora
- Aeropuertobarcelona Es 4342Documento4 pagineAeropuertobarcelona Es 4342JahdielNessuna valutazione finora
- Libro de Análisis y Diseño de Puentes Por El Método LRFDDocumento454 pagineLibro de Análisis y Diseño de Puentes Por El Método LRFDJose Mariano Ponton Calderon100% (5)
- T4086Documento189 pagineT4086JahdielNessuna valutazione finora
- Evaluación Formativa 6° Básico LENGUAJEDocumento4 pagineEvaluación Formativa 6° Básico LENGUAJESandra VidalNessuna valutazione finora
- Informe Visita EEM 5Documento9 pagineInforme Visita EEM 5Micaela Lopez RodriguezNessuna valutazione finora
- Caso 1 Gracias Por NadaDocumento7 pagineCaso 1 Gracias Por NadaJara Carrera CarolNessuna valutazione finora
- La Taxonomia de Bloom Ejemplo PreguntasDocumento8 pagineLa Taxonomia de Bloom Ejemplo PreguntasJesús Rodríguez MulatoNessuna valutazione finora
- Teleclase 16 OrtDocumento14 pagineTeleclase 16 OrtRosaili RodríguezNessuna valutazione finora
- Renovacion Del KilogramoDocumento6 pagineRenovacion Del KilogramoIgor Rodriguez OrniaNessuna valutazione finora
- Triptico de CienciasDocumento2 pagineTriptico de CienciasMArcos ARenas EUstaquioNessuna valutazione finora
- Estudio de Enfermedades y Su Tratamiento Farmacológico II PDFDocumento8 pagineEstudio de Enfermedades y Su Tratamiento Farmacológico II PDFMarla Fabiola Chavarria SantamaríaNessuna valutazione finora
- 1 Unt Examen Admisión 2013Documento5 pagine1 Unt Examen Admisión 2013Luis Castilla MoranNessuna valutazione finora
- Feliz PrimaveraDocumento16 pagineFeliz PrimaveraMontana JorgeNessuna valutazione finora
- Ejemplo Declaración TestimonialDocumento2 pagineEjemplo Declaración Testimonialgabbo245Nessuna valutazione finora
- Res. 01 Exp. 1376-2021Documento2 pagineRes. 01 Exp. 1376-2021abigail mezaNessuna valutazione finora
- Historia de La Escuela Amable ArauzDocumento2 pagineHistoria de La Escuela Amable ArauzMauricio Pilataxi67% (3)
- Las Células ProcariotasDocumento6 pagineLas Células Procariotasjose ignacioNessuna valutazione finora
- Guías No. 4 Grado CuartoDocumento5 pagineGuías No. 4 Grado CuartoManuel Guillermo Berrío GarcíaNessuna valutazione finora
- Materiales y MetodosDocumento2 pagineMateriales y MetodosZapata MicaelaNessuna valutazione finora
- Modalidades de Graduación Utm 2016Documento9 pagineModalidades de Graduación Utm 2016Brigitte BarreraNessuna valutazione finora
- Victor - Ortega - Tarea 3Documento5 pagineVictor - Ortega - Tarea 3Victor Ortega CabezasNessuna valutazione finora
- ResumenDocumento6 pagineResumenEdson Paolo Alvarado FloresNessuna valutazione finora
- Resiliencia Y QuironDocumento84 pagineResiliencia Y QuironMariu100% (1)
- Balística - Forense.iiDocumento13 pagineBalística - Forense.iiMery Granados PrudencioNessuna valutazione finora
- Diseño y Construcción de Un Agitador de Muestras Minerales en Soluciono Acuosa para El Laboratorio de Suelos y Aguas de La Universidad de Córdoba PDFDocumento143 pagineDiseño y Construcción de Un Agitador de Muestras Minerales en Soluciono Acuosa para El Laboratorio de Suelos y Aguas de La Universidad de Córdoba PDFrobert ayusNessuna valutazione finora
- 01 Indumentaria Civilizaciones Antiguas PrehistoriaDocumento37 pagine01 Indumentaria Civilizaciones Antiguas PrehistoriaElisa MorenoNessuna valutazione finora
- Unidad Didactica El Colegio Ana-Lucia-Clara-Raquel Original Ucjc. FinDocumento41 pagineUnidad Didactica El Colegio Ana-Lucia-Clara-Raquel Original Ucjc. FinGuadi GuaditaNessuna valutazione finora
- Sustentacion Trabajo Colaborativo Estadistica 2Documento6 pagineSustentacion Trabajo Colaborativo Estadistica 2Johanna Morales0% (1)
- Historia de Las Apariciones de La Virgen de FátimaDocumento18 pagineHistoria de Las Apariciones de La Virgen de Fátimacarlos carrillo0% (1)
- Caso Clinico Anemia FerropenicaDocumento2 pagineCaso Clinico Anemia FerropenicaVictor Bush Ortega25% (4)
- Valoración Penal - Tortura Raymundo Chávez Chávez Contra La Salud y Otros (254-2014)Documento22 pagineValoración Penal - Tortura Raymundo Chávez Chávez Contra La Salud y Otros (254-2014)Ivan Martinez Vega100% (1)
- Soberania Tecnologica Con Sentido SocialDocumento18 pagineSoberania Tecnologica Con Sentido SocialBrimer MorenoNessuna valutazione finora