Potrebbero piacerti anche
- Reglamento ElectricoDocumento16 pagineReglamento Electricoscribd_lostandfoundNessuna valutazione finora
- Elementos Finitos Con Computadoras PDFDocumento130 pagineElementos Finitos Con Computadoras PDFguillermoyaryaNessuna valutazione finora
- Airy Soluciones PolinomicasDocumento233 pagineAiry Soluciones PolinomicasRoberto González NavarrteNessuna valutazione finora
- Cimentacion de MaquinaDocumento13 pagineCimentacion de Maquinaalfredo pumaNessuna valutazione finora
- Fundacion ElasticaDocumento58 pagineFundacion ElasticaEduardo ArmentaNessuna valutazione finora
- Calculo Viento EcuadorDocumento280 pagineCalculo Viento EcuadorHenry ValenciaNessuna valutazione finora
- Teoría Clásica de PlacasDocumento87 pagineTeoría Clásica de PlacasAlfonso BautistaNessuna valutazione finora
- Métodos Numéricos Expresados en Algoritmos y Aplicado en ExcelDocumento16 pagineMétodos Numéricos Expresados en Algoritmos y Aplicado en ExcelCristina FlorentinoNessuna valutazione finora
- Pavimento RigidoDocumento7 paginePavimento RigidoJoseLuisMurciaNessuna valutazione finora
- PandeoDocumento10 paginePandeoWilson Rodríguez CalderónNessuna valutazione finora
- Modulo de TorsionDocumento4 pagineModulo de TorsionAndresJuanNessuna valutazione finora
- Superficies de FluenciaDocumento15 pagineSuperficies de FluenciaIvan Huaman Segura100% (1)
- Apunte Emparrillado Metodo de Las FuerzasDocumento3 pagineApunte Emparrillado Metodo de Las FuerzasMatias MatiasNessuna valutazione finora
- Ejercicio #2 - Diseño de Miembro A Traccion (Tirante)Documento17 pagineEjercicio #2 - Diseño de Miembro A Traccion (Tirante)enmanuel maldonadoNessuna valutazione finora
- Problemas Roca Vila 1Documento8 pagineProblemas Roca Vila 1Claude Caceres MalpicaNessuna valutazione finora
- Armaduras 2DDocumento30 pagineArmaduras 2Domar leyva acevedoNessuna valutazione finora
- Movimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Documento32 pagineMovimiento Uniforme en Canales y Tuberias Grupo 2 (Rodriguez No Trabajó)Piero Arcos CerronNessuna valutazione finora
- Análisis estructuras segundo ordenDocumento67 pagineAnálisis estructuras segundo ordenmiguelleivamogollon100% (3)
- Combinacion y Mayoracion de AccionesDocumento6 pagineCombinacion y Mayoracion de AccionesPablo QuispeNessuna valutazione finora
- Coeficiente de Momentos CBDocumento4 pagineCoeficiente de Momentos CBRicardo Ortiz100% (1)
- Esfuerzos ResidualesDocumento31 pagineEsfuerzos ResidualesSakaSC100% (1)
- Pandeo Lateral Torsional (PLT)Documento18 paginePandeo Lateral Torsional (PLT)Patito PugaNessuna valutazione finora
- Ejercicios de Metodo de Elemento FinitoDocumento2 pagineEjercicios de Metodo de Elemento FinitoCarlos GuerreiroNessuna valutazione finora
- Juan Carlos Mendoza Tarea 5Documento11 pagineJuan Carlos Mendoza Tarea 5Juan Carlos MendozaNessuna valutazione finora
- Elementos Unidimensionales - BarrasDocumento50 pagineElementos Unidimensionales - BarrasCriaderoHnosBarreraBucayNessuna valutazione finora
- Introducción A Los Chorros (Jets)Documento23 pagineIntroducción A Los Chorros (Jets)Juan Antonio Perez Bravo100% (1)
- T10. Elementos placa: teorías y elementos finitosDocumento23 pagineT10. Elementos placa: teorías y elementos finitos6758705Nessuna valutazione finora
- Solución Problemas-Sesión 5Documento26 pagineSolución Problemas-Sesión 5edgar046100% (1)
- Norma UOCT Instalación SemáforosDocumento85 pagineNorma UOCT Instalación SemáforosKevin Angelo Araya MontalvaNessuna valutazione finora
- Diagramas de Interaccion NilsonDocumento12 pagineDiagramas de Interaccion NilsonEduardo LozanoNessuna valutazione finora
- Golpe de Ariete HJ 139-153Documento8 pagineGolpe de Ariete HJ 139-153josue.angelo9459Nessuna valutazione finora
- AnalisisPlacas CorregidoDocumento44 pagineAnalisisPlacas CorregidoJosep Romero TaroncherNessuna valutazione finora
- Dinamica Estructural. Problemas Resueltos. AplicacionesDocumento19 pagineDinamica Estructural. Problemas Resueltos. AplicacionessafiounisNessuna valutazione finora
- Teoría de Tubos de Paredes GruesasDocumento16 pagineTeoría de Tubos de Paredes Gruesasdianny qspNessuna valutazione finora
- Biagio Arbulu SfsfeeDocumento43 pagineBiagio Arbulu SfsfeeCristian Baique TimanáNessuna valutazione finora
- Tubos GruesosDocumento33 pagineTubos GruesosPatricia Vallone100% (1)
- Vigas EstructurasDocumento16 pagineVigas EstructurasByron OchoaNessuna valutazione finora
- Analisis Matricial de Estructuras 56745d2ccc89c PDFDocumento4 pagineAnalisis Matricial de Estructuras 56745d2ccc89c PDFEdward Terrazas RodríguezNessuna valutazione finora
- Ejercicio Calculo de Reacciones en 3D - Mediante Fuerza-MomentoDocumento3 pagineEjercicio Calculo de Reacciones en 3D - Mediante Fuerza-MomentohectorjoaNessuna valutazione finora
- Análisis Matricial EstructurasDocumento20 pagineAnálisis Matricial EstructurasxxickoNessuna valutazione finora
- Matriz de TensionesDocumento5 pagineMatriz de TensionesCu PerNessuna valutazione finora
- Silabo EstaticaDocumento6 pagineSilabo EstaticaJhon Tamara RamirezNessuna valutazione finora
- Manual de SAP2000 v23Documento1 paginaManual de SAP2000 v23Felipe MartínezNessuna valutazione finora
- 10) CAPITULO 4 - Apuntes de Fisica General - José Pedro Agustin Valera NegreteDocumento63 pagine10) CAPITULO 4 - Apuntes de Fisica General - José Pedro Agustin Valera NegreteCarlos Frusciante100% (1)
- Apuntes - 2-MAMPOSTERIA ESTRUCTURALDocumento52 pagineApuntes - 2-MAMPOSTERIA ESTRUCTURALpirelli2010Nessuna valutazione finora
- 01 Flexion Viga Fundacion Elastica - WorkbenchDocumento11 pagine01 Flexion Viga Fundacion Elastica - WorkbenchCesarJcrNessuna valutazione finora
- Nudos SísmicosDocumento9 pagineNudos Sísmicoseler lopezNessuna valutazione finora
- Acero de Refuerzo Diametros y Longitudes ComercialesDocumento12 pagineAcero de Refuerzo Diametros y Longitudes ComercialesFranklin MatamorosNessuna valutazione finora
- Formulación de Forma DébilDocumento12 pagineFormulación de Forma DébilMario Covarrubias NavarroNessuna valutazione finora
- Barra de Seccion Variable Ejemplo BasicoDocumento5 pagineBarra de Seccion Variable Ejemplo BasicoLuis MontoyaNessuna valutazione finora
- Metodo Matricial PDFDocumento22 pagineMetodo Matricial PDFedison carvajal vilchezNessuna valutazione finora
- Libro Total OñateDocumento281 pagineLibro Total OñateJeorge Esrom Chambi100% (3)
- 1 - Introducción Al MEFDocumento10 pagine1 - Introducción Al MEFIñaki ZudaireNessuna valutazione finora
- Elemento Finito de Elemento Timo Marco Espacial y Elemento Tipo BarraDocumento41 pagineElemento Finito de Elemento Timo Marco Espacial y Elemento Tipo BarraOscarNessuna valutazione finora
- Aplicando El M.E.F. en ReticuladosDocumento20 pagineAplicando El M.E.F. en ReticuladosAlizo Altamirano LeonNessuna valutazione finora
- Ecuaciones Euler BernoulliDocumento9 pagineEcuaciones Euler BernoulliTerry BogardNessuna valutazione finora
- Cálculo Avanzado Capitulo 1 PDFDocumento11 pagineCálculo Avanzado Capitulo 1 PDFGermán BrescianoNessuna valutazione finora
- Mallas 1Documento5 pagineMallas 1FlickCapoeiraNessuna valutazione finora
- TFG Uniones Semirrã GidasDocumento90 pagineTFG Uniones Semirrã GidasSas ArrNessuna valutazione finora
- Tornapuntas para Pandeo Lateral en VigasDocumento10 pagineTornapuntas para Pandeo Lateral en VigasFlickCapoeiraNessuna valutazione finora
- 2013 07 01 Marcado Ce Ba50Documento1 pagina2013 07 01 Marcado Ce Ba50FlickCapoeiraNessuna valutazione finora
- Influencia resistencia hormigón comportamiento conectoresDocumento8 pagineInfluencia resistencia hormigón comportamiento conectoresFlickCapoeiraNessuna valutazione finora
- Arco de DescargaDocumento310 pagineArco de DescargaFlickCapoeiraNessuna valutazione finora
- Mechinales Segun CTEDocumento1 paginaMechinales Segun CTEFlickCapoeiraNessuna valutazione finora
- 2013 07 01 Declaracion de Prestaciones FirmadaDocumento1 pagina2013 07 01 Declaracion de Prestaciones FirmadaFlickCapoeiraNessuna valutazione finora
- Vigas Tablón 20+2+5 - Porche PequeñoDocumento3 pagineVigas Tablón 20+2+5 - Porche PequeñoFlickCapoeiraNessuna valutazione finora
- Muro de Carga Min. Pendiente - Extremmo - Cub PequeñaDocumento1 paginaMuro de Carga Min. Pendiente - Extremmo - Cub PequeñaFlickCapoeiraNessuna valutazione finora
- Muro de Carga LadrilloDocumento1 paginaMuro de Carga LadrilloFlickCapoeiraNessuna valutazione finora
- Onduline Teja CurvaDocumento17 pagineOnduline Teja CurvaFlickCapoeiraNessuna valutazione finora
- Manual Tecnico de ConectadoresDocumento36 pagineManual Tecnico de ConectadoresfaviikaujaNessuna valutazione finora
- Formulacion Simplificada Calculo Cristal Espesor EquivalenteDocumento11 pagineFormulacion Simplificada Calculo Cristal Espesor EquivalenteFlickCapoeiraNessuna valutazione finora
- Calculo Eh73Documento29 pagineCalculo Eh73FlickCapoeiraNessuna valutazione finora
- Felx+cortante JacenaDocumento1 paginaFelx+cortante JacenaFlickCapoeiraNessuna valutazione finora
- Cistella BasquetDocumento7 pagineCistella BasquetFlickCapoeiraNessuna valutazione finora
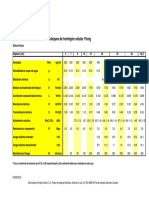
- V2 - Resumen Características Técnicas de Los Bloques de Hormigón Celular YtongDocumento1 paginaV2 - Resumen Características Técnicas de Los Bloques de Hormigón Celular YtongFlickCapoeiraNessuna valutazione finora
- Ejecrcicios MicrpilotesDocumento4 pagineEjecrcicios MicrpilotesFlickCapoeiraNessuna valutazione finora
- Catálogo Puentes Térmicos - 2015 v1.1Documento36 pagineCatálogo Puentes Térmicos - 2015 v1.1FlickCapoeiraNessuna valutazione finora
- Pasador TitanDocumento6 paginePasador TitanFlickCapoeiraNessuna valutazione finora
- Memoria Proyecto Tipo v3Documento57 pagineMemoria Proyecto Tipo v3FlickCapoeiraNessuna valutazione finora
- Sika CarboDur EDocumento4 pagineSika CarboDur EGOMEZ JEREZNessuna valutazione finora
- Tema 3 - Hundimiento PDFDocumento32 pagineTema 3 - Hundimiento PDFFlickCapoeiraNessuna valutazione finora
- EA Pilar 4 PDocumento0 pagineEA Pilar 4 PpocoyoytuNessuna valutazione finora
- Tesis Pretensado Exterior PDFDocumento536 pagineTesis Pretensado Exterior PDFFlickCapoeiraNessuna valutazione finora
- Estructuras Metálicas Uned PDFDocumento335 pagineEstructuras Metálicas Uned PDFJessica OliverNessuna valutazione finora
- Ejercicio Final MicropilotesDocumento9 pagineEjercicio Final MicropilotesFlickCapoeiraNessuna valutazione finora
- Fib Postensados en EdificacionDocumento166 pagineFib Postensados en EdificacionFlickCapoeiraNessuna valutazione finora
- Flechas HormigonDocumento2 pagineFlechas HormigonFlickCapoeiraNessuna valutazione finora
- 1º E1 S3 Sesion D2 Mat Los Números 1, 2, 3Documento10 pagine1º E1 S3 Sesion D2 Mat Los Números 1, 2, 3Paula FiorellaNessuna valutazione finora
- Obsesión de VivirDocumento32 pagineObsesión de VivirdonjuancitoNessuna valutazione finora
- Calcular Espiras y Calibre de BobinadoDocumento6 pagineCalcular Espiras y Calibre de BobinadoWalter Rubén Choque VillgasNessuna valutazione finora
- Fundamentos del comportamiento humanoDocumento26 pagineFundamentos del comportamiento humanoLiliana Silva GalvánNessuna valutazione finora
- Unidad Didáctica - Fulgencio TovarDocumento7 pagineUnidad Didáctica - Fulgencio TovarNayely MamaniNessuna valutazione finora
- Cuadro SociologiaDocumento1 paginaCuadro SociologiasantiagoeliasblasiNessuna valutazione finora
- IntroducciónDocumento51 pagineIntroducciónAdrián Sosa NuezNessuna valutazione finora
- Apuntes en Torno A La Dimensión Ideológica Ii BisDocumento7 pagineApuntes en Torno A La Dimensión Ideológica Ii BisfrancodegiusttiNessuna valutazione finora
- Hugo Biagini - El Pensamiento IdentitarioDocumento7 pagineHugo Biagini - El Pensamiento IdentitariosergioodiazNessuna valutazione finora
- Filosofías Del MarketingDocumento3 pagineFilosofías Del MarketingBriyito Super100% (1)
- Tarea 1 FinalTERMODocumento3 pagineTarea 1 FinalTERMOnaturaleza8Nessuna valutazione finora
- Disponiblidad Hidrica ChililiqueDocumento6 pagineDisponiblidad Hidrica ChililiqueJohanna Vera SarmientoNessuna valutazione finora
- Historia y origen de la mediación escolarDocumento16 pagineHistoria y origen de la mediación escolaralmaNessuna valutazione finora
- Pa01 EstadisticaaplicadaDocumento9 paginePa01 EstadisticaaplicadaJohn Teo Olortegui SolorzanoNessuna valutazione finora
- Transferencia de Calor en Estado InestableDocumento4 pagineTransferencia de Calor en Estado InestableLucy Varas Rojas100% (2)
- Dirofiliarosis en Perros SJL LimaDocumento4 pagineDirofiliarosis en Perros SJL LimaNice RamosNessuna valutazione finora
- Quisqueya Verde Desarrolla Economía de MontañasDocumento4 pagineQuisqueya Verde Desarrolla Economía de MontañasAlexandra MaldonadoNessuna valutazione finora
- Ramas de La Fisica ClasicaDocumento2 pagineRamas de La Fisica ClasicaAlberto Mejía MonroyNessuna valutazione finora
- TEST - 2 - Econometria AplicadaDocumento4 pagineTEST - 2 - Econometria AplicadaGiuseppe PalominoNessuna valutazione finora
- SUVAGDocumento4 pagineSUVAGAgus SchNessuna valutazione finora
- Catalogo DE RESORTESDocumento360 pagineCatalogo DE RESORTESGerardo Boni100% (1)
- Procedimiento de Instalacion de TanquesDocumento4 pagineProcedimiento de Instalacion de TanquesJose PerezNessuna valutazione finora
- Transmisión de movimientoDocumento31 pagineTransmisión de movimientomelanyNessuna valutazione finora
- Secuencia Producci N TextodescrictivoDocumento4 pagineSecuencia Producci N TextodescrictivoSantiago Tasayco AvalosNessuna valutazione finora
- Guía de Trabajo Semana 4Documento2 pagineGuía de Trabajo Semana 4CM JesusNessuna valutazione finora
- Hannah - Arendt - de La Obediencia A La ResponsabilidadDocumento6 pagineHannah - Arendt - de La Obediencia A La ResponsabilidadJuan Miguel Mendoza OlanNessuna valutazione finora
- Informe 2 L. KirchoffDocumento10 pagineInforme 2 L. Kirchoff202102922Nessuna valutazione finora
- 00 Serie Explora 2012 LIBRO Web-2BDocumento129 pagine00 Serie Explora 2012 LIBRO Web-2BMario Raul SoriaNessuna valutazione finora
- Memoria Descriptiva v3Documento25 pagineMemoria Descriptiva v3carlos nuñezNessuna valutazione finora
- Integración, convolución, correlación y filtros coincidentesDocumento4 pagineIntegración, convolución, correlación y filtros coincidentesDanilo JacomeNessuna valutazione finora