Potrebbero piacerti anche
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Brute Force Interactions: Leveraging Intense Physical Actions in GamingDocumento8 pagineBrute Force Interactions: Leveraging Intense Physical Actions in GamingsrlresearchNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Controlling Your TV With GesturesDocumento4 pagineControlling Your TV With GesturessrlresearchNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Whole Body Interaction 2010Documento4 pagineWhole Body Interaction 2010srlresearchNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Drawing With The Hand in Free Space: Creating 3D Shapes With Gesture in A Semi-Immersive EnvironmentDocumento5 pagineDrawing With The Hand in Free Space: Creating 3D Shapes With Gesture in A Semi-Immersive EnvironmentsrlresearchNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- Real-Time 3D Hand-Computer Interaction: Optimization and Complexity ReductionDocumento9 pagineReal-Time 3D Hand-Computer Interaction: Optimization and Complexity ReductionsrlresearchNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- High Level Activity Recognition Using Low Resolution Wearable VisionDocumento8 pagineHigh Level Activity Recognition Using Low Resolution Wearable VisionsrlresearchNessuna valutazione finora
- HandNavigator: Hands-On Interaction For Desktop Virtual RealityDocumento8 pagineHandNavigator: Hands-On Interaction For Desktop Virtual RealitysrlresearchNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Real-Time Robust Body Part Tracking For Augmented Reality InterfaceDocumento6 pagineReal-Time Robust Body Part Tracking For Augmented Reality InterfacesrlresearchNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Feature Selection For Grasp Recognition From Optical MarkersDocumento7 pagineFeature Selection For Grasp Recognition From Optical MarkerssrlresearchNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Real-Time Hand-Tracking As A User Input DeviceDocumento4 pagineReal-Time Hand-Tracking As A User Input DevicesrlresearchNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- Cobra: Flexible Displays For Mobile Gaming ScenariosDocumento5 pagineCobra: Flexible Displays For Mobile Gaming ScenariossrlresearchNessuna valutazione finora
- Graspables: Grasp-Recognition As A User InterfaceDocumento9 pagineGraspables: Grasp-Recognition As A User InterfacesrlresearchNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Feature Selection For Grasp Recognition From Optical MarkersDocumento7 pagineFeature Selection For Grasp Recognition From Optical MarkerssrlresearchNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- EyeDraw: Enabling Children With Severe Motor Impairments To Draw With Their EyesDocumento10 pagineEyeDraw: Enabling Children With Severe Motor Impairments To Draw With Their EyessrlresearchNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- What Do You See When You're Surfing? Using Eye Tracking To Predict Salient Regions of Web PagesDocumento10 pagineWhat Do You See When You're Surfing? Using Eye Tracking To Predict Salient Regions of Web PagessrlresearchNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Interacting With Eye Movements in Virtual EnvironmentsDocumento8 pagineInteracting With Eye Movements in Virtual EnvironmentssrlresearchNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Detecting Gesture Force Peaks For Intuitive InteractionDocumento8 pagineDetecting Gesture Force Peaks For Intuitive InteractionsrlresearchNessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Whack Gestures: Inexact and Inattentive Interaction With Mobile DevicesDocumento4 pagineWhack Gestures: Inexact and Inattentive Interaction With Mobile DevicessrlresearchNessuna valutazione finora
- Real-Time Robust Body Part Tracking For Augmented Reality InterfaceDocumento6 pagineReal-Time Robust Body Part Tracking For Augmented Reality InterfacesrlresearchNessuna valutazione finora
- Online, Interactive Learning of Gestures For Human/Robot InterfacesDocumento6 pagineOnline, Interactive Learning of Gestures For Human/Robot InterfacessrlresearchNessuna valutazione finora
- User-Defined Gestures For Surface ComputingDocumento10 pagineUser-Defined Gestures For Surface ComputingtinkrboxNessuna valutazione finora
- The Wiimote With Multiple Sensor Bars: Creating An Affordable, Virtual Reality ControllerDocumento4 pagineThe Wiimote With Multiple Sensor Bars: Creating An Affordable, Virtual Reality ControllersrlresearchNessuna valutazione finora
- A General Education Course in Tangible Interaction DesignDocumento8 pagineA General Education Course in Tangible Interaction DesignsrlresearchNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Toward Natural Gesture/Speech HCI: A Case Study of Weather NarrationDocumento6 pagineToward Natural Gesture/Speech HCI: A Case Study of Weather NarrationsrlresearchNessuna valutazione finora
- Coming To Grips With The Objects We Grasp: Detecting Interactions With Efficient Wrist-Worn SensorsDocumento8 pagineComing To Grips With The Objects We Grasp: Detecting Interactions With Efficient Wrist-Worn SensorssrlresearchNessuna valutazione finora
- Do We Need Eye Trackers To Tell Where People Look?Documento6 pagineDo We Need Eye Trackers To Tell Where People Look?srlresearchNessuna valutazione finora
- Webcam Mouse Using Face and Eye Tracking in Various Illumination EnvironmentsDocumento4 pagineWebcam Mouse Using Face and Eye Tracking in Various Illumination EnvironmentssrlresearchNessuna valutazione finora
- Recent Developments and Applications of Haptic DevicesDocumento16 pagineRecent Developments and Applications of Haptic DevicessrlresearchNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Liquids, Smoke, and Soap Bubbles - Reflections On Materials For Ephemeral User InterfacesDocumento2 pagineLiquids, Smoke, and Soap Bubbles - Reflections On Materials For Ephemeral User InterfacessrlresearchNessuna valutazione finora
- IEEE 525-2007 Design and Installation of Cable Systems in SubstationDocumento47 pagineIEEE 525-2007 Design and Installation of Cable Systems in SubstationSeahlkNessuna valutazione finora
- BLDC DriverDocumento8 pagineBLDC DriverRich ManNessuna valutazione finora
- Ariel Coronel CV PDFDocumento4 pagineAriel Coronel CV PDFariel coronelNessuna valutazione finora
- Physical Transmission MediaDocumento47 paginePhysical Transmission MediaabdulazizNessuna valutazione finora
- Hydraulic Presentation: June 2008Documento24 pagineHydraulic Presentation: June 2008Ramiro Joel Quiñonez Ramos100% (1)
- Top221 227Documento20 pagineTop221 227JEVG1Nessuna valutazione finora
- Manual Asus P5GPL-XDocumento94 pagineManual Asus P5GPL-XJuan PerezNessuna valutazione finora
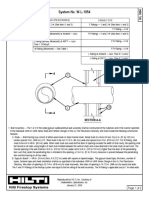
- W-L-1054 Pipe Through Gyp Board AssemblyDocumento2 pagineW-L-1054 Pipe Through Gyp Board AssemblyJason StelleNessuna valutazione finora
- Evidence Plan: Machining NCII Turn Work Piece (Intermediate)Documento12 pagineEvidence Plan: Machining NCII Turn Work Piece (Intermediate)alice jane lagsa100% (1)
- Highrise Review PrelimDocumento48 pagineHighrise Review PrelimZYJA DLANE MALITNessuna valutazione finora
- Valmet612DSJL 290HPDocumento67 pagineValmet612DSJL 290HPJoaopaulo Tavares0% (1)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- UC Inspection Sheet Samsung Dash 2 SeriesDocumento5 pagineUC Inspection Sheet Samsung Dash 2 SeriesLuis BertaoNessuna valutazione finora
- Digital Multimeter Selection GuideDocumento3 pagineDigital Multimeter Selection GuideThomas VargheseNessuna valutazione finora
- Script - InfusomatSpace - 3.0 PDFDocumento70 pagineScript - InfusomatSpace - 3.0 PDFLeandro Daniel Leon LabradaNessuna valutazione finora
- Basic Principles V2Documento20 pagineBasic Principles V2Gautam PkNessuna valutazione finora
- Injection Pump Calibration Data: Assy No.: 106671-0224Documento4 pagineInjection Pump Calibration Data: Assy No.: 106671-0224Elson DorigonNessuna valutazione finora
- MGTF BrochureDocumento36 pagineMGTF BrochureLeather JockNessuna valutazione finora
- Copy of OS Supply MTN ALLDocumento48 pagineCopy of OS Supply MTN ALLIhsanNessuna valutazione finora
- Service - Documentation Modulith SLX-F2Documento8 pagineService - Documentation Modulith SLX-F2Michael LafertteNessuna valutazione finora
- 6 BLP Spesifikasi Teknis NOC 14920Documento3 pagine6 BLP Spesifikasi Teknis NOC 14920Ka BudiKaNessuna valutazione finora
- M 325 D (1) ElectDocumento4 pagineM 325 D (1) ElectJesus CortesNessuna valutazione finora
- Service Manual: 19" LCD Monitor LM965Documento57 pagineService Manual: 19" LCD Monitor LM965danielradu27Nessuna valutazione finora
- Horizontal Multi-Stage Pumps: Component MaterialDocumento2 pagineHorizontal Multi-Stage Pumps: Component MaterialBrayan CJNessuna valutazione finora
- Firefly Royu Wiring Devices Price List March 2016Documento2 pagineFirefly Royu Wiring Devices Price List March 2016Alvin Lagasca100% (1)
- PRO1 10E Introduction Micromaster PDFDocumento20 paginePRO1 10E Introduction Micromaster PDFTinhNguyenNessuna valutazione finora
- ST10 Family: Advanced 16-Bit Microcontroller SolutionsDocumento2 pagineST10 Family: Advanced 16-Bit Microcontroller Solutionsleuchimed mouhNessuna valutazione finora
- API and ASME steel pipes specificationsDocumento2 pagineAPI and ASME steel pipes specificationsRiad.belNessuna valutazione finora
- Horizontal Pre-Piped Bladder Tanks With Proportioner: FeaturesDocumento6 pagineHorizontal Pre-Piped Bladder Tanks With Proportioner: FeaturesRafael RodríguezNessuna valutazione finora
- 1.01.20 Stay Current WOPDocumento12 pagine1.01.20 Stay Current WOPAndreyIvanovNessuna valutazione finora
- Certified Solidworks Professional Advanced Weldments Exam PreparationDa EverandCertified Solidworks Professional Advanced Weldments Exam PreparationValutazione: 5 su 5 stelle5/5 (1)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Da EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Nessuna valutazione finora