Potrebbero piacerti anche
- Exercising Your Way To Lower Blood Pressure PDFDocumento2 pagineExercising Your Way To Lower Blood Pressure PDFlazarosNessuna valutazione finora
- Application Note: Microwave Heating Applications Part 3: Switch-Mode Resonant Power Supplies For Microwave GeneratorsDocumento4 pagineApplication Note: Microwave Heating Applications Part 3: Switch-Mode Resonant Power Supplies For Microwave GeneratorslazarosNessuna valutazione finora
- Active Magnetic AntennasDocumento53 pagineActive Magnetic AntennaslazarosNessuna valutazione finora
- Active Magnetic Antennas PDFDocumento6 pagineActive Magnetic Antennas PDFlazarosNessuna valutazione finora
- Tehillimsample PDFDocumento50 pagineTehillimsample PDFlazarosNessuna valutazione finora
- Buddhist ParablesDocumento495 pagineBuddhist ParablesRocío JM100% (1)
- 4005DDS DatasheetDocumento1 pagina4005DDS DatasheetlazarosNessuna valutazione finora
- Master RegardoDocumento2 pagineMaster RegardoRituraj KaushikNessuna valutazione finora
- RF 5thunit PDFDocumento61 pagineRF 5thunit PDFMani SriNessuna valutazione finora
- 2016 Shishido CatalogDocumento24 pagine2016 Shishido CataloglazarosNessuna valutazione finora
- Ajtr 1308004Documento8 pagineAjtr 1308004lazarosNessuna valutazione finora
- Ξεπέρασε Την Ταχύτητα Του Φωτός Στις ΕπικοινωνίεςDocumento5 pagineΞεπέρασε Την Ταχύτητα Του Φωτός Στις ΕπικοινωνίεςlazarosNessuna valutazione finora
- Chap 7Documento87 pagineChap 7lazarosNessuna valutazione finora
- Pyramid PowerDocumento4 paginePyramid PowerUmeshNessuna valutazione finora
- AV02-4387EN DG Opto 2014-01-031Documento67 pagineAV02-4387EN DG Opto 2014-01-031lazarosNessuna valutazione finora
- Application Note: Microwave Heating Applications Part 3: Switch-Mode Resonant Power Supplies For Microwave GeneratorsDocumento4 pagineApplication Note: Microwave Heating Applications Part 3: Switch-Mode Resonant Power Supplies For Microwave GeneratorslazarosNessuna valutazione finora
- Electromagnetismextrastudyquestions PDFDocumento80 pagineElectromagnetismextrastudyquestions PDFlazarosNessuna valutazione finora
- Some Alot of Circuits With DiscriptionDocumento47 pagineSome Alot of Circuits With DiscriptionlazarosNessuna valutazione finora
- Spherical Resonant Mass DetectorsDocumento88 pagineSpherical Resonant Mass DetectorslazarosNessuna valutazione finora
- Vuk Stefanovic Karadzic: Srpski Rjecnik (1898)Documento935 pagineVuk Stefanovic Karadzic: Srpski Rjecnik (1898)krca100% (2)
- Water GuideDocumento17 pagineWater Guidelazaros100% (1)
- ARTECHE - NT - IVT For Line and Cap Bank Discharge - ENDocumento2 pagineARTECHE - NT - IVT For Line and Cap Bank Discharge - ENlazarosNessuna valutazione finora
- Electricity From The SkyDocumento12 pagineElectricity From The Skyjester77200196% (27)
- 4915 Final Document PDFDocumento81 pagine4915 Final Document PDFlazarosNessuna valutazione finora
- GeneralizedClassicalElectrodynamics PDFDocumento21 pagineGeneralizedClassicalElectrodynamics PDFlazarosNessuna valutazione finora
- What Are Scalar Waves - Horst Eckardt - Jan 2012 PDFDocumento9 pagineWhat Are Scalar Waves - Horst Eckardt - Jan 2012 PDFlazarosNessuna valutazione finora
- Scalar Resonator Manual PDFDocumento4 pagineScalar Resonator Manual PDFlazarosNessuna valutazione finora
- Nepenthes and Cannabis in Ancient Greece: Luigi ArataDocumento16 pagineNepenthes and Cannabis in Ancient Greece: Luigi AratalazarosNessuna valutazione finora
- Insect and Pest Repellent CalendarDocumento40 pagineInsect and Pest Repellent CalendarlazarosNessuna valutazione finora
- BatEcholocationResearch PDFDocumento174 pagineBatEcholocationResearch PDFlazarosNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Safety and reliability of hydraulics check valvesDocumento6 pagineSafety and reliability of hydraulics check valvesJessica Tatiana Muñoz OrtizNessuna valutazione finora
- A2A Piper J3 Pilots ManualDocumento126 pagineA2A Piper J3 Pilots Manualskeleton1Nessuna valutazione finora
- K.V Physics InvestigatoryDocumento18 pagineK.V Physics InvestigatoryDEVANSHNessuna valutazione finora
- Guide to Structural Analysis Beam ExampleDocumento6 pagineGuide to Structural Analysis Beam ExamplegertjaniNessuna valutazione finora
- LTTP Company PresentationDocumento14 pagineLTTP Company PresentationkarwalpkNessuna valutazione finora
- Exact Solutions To The Navier-Stokes EquationsDocumento7 pagineExact Solutions To The Navier-Stokes EquationsMohamad KhairNessuna valutazione finora
- Hungarian Aeronautical Industry 2014Documento44 pagineHungarian Aeronautical Industry 2014Anonymous KaoLHAktNessuna valutazione finora
- Aerodynamic Investigations of Ventilated Brake Disks: D. Parish and D. G. MacmanusDocumento31 pagineAerodynamic Investigations of Ventilated Brake Disks: D. Parish and D. G. MacmanusRITWIK KULKARNI (B15ME033)Nessuna valutazione finora
- Ice Protection EnableDocumento7 pagineIce Protection EnableMonindika WarshakoonNessuna valutazione finora
- 41xx SteelDocumento2 pagine41xx Steelkumar rajaNessuna valutazione finora
- Minimum Cost and Weight Design of Fuselage Frames Part A: Design Constraints and Manufacturing Process CharacteristicsDocumento8 pagineMinimum Cost and Weight Design of Fuselage Frames Part A: Design Constraints and Manufacturing Process CharacteristicsArmando VasquezNessuna valutazione finora
- Vortex Induced VibrationsDocumento7 pagineVortex Induced VibrationsKevin Paredes GutierrezNessuna valutazione finora
- The ARMADA+June 2012Documento76 pagineThe ARMADA+June 2012sithusoemoeNessuna valutazione finora
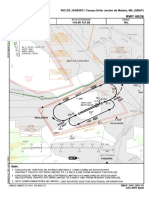
- Sbaf Rwy-08-26 Vac 20211104Documento2 pagineSbaf Rwy-08-26 Vac 20211104Fábio KastelamaryNessuna valutazione finora
- 3.abutment - WingsDocumento12 pagine3.abutment - WingsBilal A BarbhuiyaNessuna valutazione finora
- Salem Municipal Airport - Phase II AppendiciesDocumento164 pagineSalem Municipal Airport - Phase II AppendiciesStatesman JournalNessuna valutazione finora
- Design Engineer with experience in structural design and flight control systems for light aircraftDocumento12 pagineDesign Engineer with experience in structural design and flight control systems for light aircraftkrpraveenkumar2003Nessuna valutazione finora
- Field Visit: Pokhara Regional International Airport: Presented byDocumento26 pagineField Visit: Pokhara Regional International Airport: Presented bySamjhana TiwariNessuna valutazione finora
- PAOB F50 Manual v1.1Documento80 paginePAOB F50 Manual v1.1Jose Antonio Montiel QuirosNessuna valutazione finora
- Durham Fluent Tutorial GuideDocumento6 pagineDurham Fluent Tutorial GuidenavidelecNessuna valutazione finora
- Ship Type and Cargo DescriptionDocumento12 pagineShip Type and Cargo DescriptionLiviu VladNessuna valutazione finora
- The Epic Story of The Fastest Ride in History Though The Heart of The Grand Canyon: THE EMERALD MILE by Kevin FedarkoDocumento33 pagineThe Epic Story of The Fastest Ride in History Though The Heart of The Grand Canyon: THE EMERALD MILE by Kevin FedarkoSimon and SchusterNessuna valutazione finora
- Review A Research Trends in Air Foil Thrust Bearings Used in Micro Turbines and Aircraft MachinesDocumento13 pagineReview A Research Trends in Air Foil Thrust Bearings Used in Micro Turbines and Aircraft MachinespratikNessuna valutazione finora
- A Comparison On The Design Codes of Wind Loadings On BuildingsDocumento13 pagineA Comparison On The Design Codes of Wind Loadings On BuildingsChing-wen ChienNessuna valutazione finora
- HAL's Summer Training Report on Accessories DivisionDocumento35 pagineHAL's Summer Training Report on Accessories DivisionRIKKIYADAV50% (2)
- Fundamentals of Propulsion BabuDocumento164 pagineFundamentals of Propulsion BabuSara50% (2)
- Flight EnvelopeDocumento6 pagineFlight Envelopevishnu_sreekumar91Nessuna valutazione finora
- Virac Airport ProfileDocumento19 pagineVirac Airport ProfileTim FloresNessuna valutazione finora
- LGKR - Corfu Approach PlatesDocumento45 pagineLGKR - Corfu Approach PlatesJonas50% (2)
- F-15E Radar Modernization Program (RMP)Documento2 pagineF-15E Radar Modernization Program (RMP)joma11Nessuna valutazione finora