Potrebbero piacerti anche
- Costos por órdenes de producción y por procesosDa EverandCostos por órdenes de producción y por procesosNessuna valutazione finora
- Practica de Controladores PD, PI, PDIDocumento7 paginePractica de Controladores PD, PI, PDIJce Svu100% (2)
- Informe de Controladores PIDDocumento20 pagineInforme de Controladores PIDfranco_3210_Nessuna valutazione finora
- Acción de Control de Dos Posiciones o de Encendido y ApagadoDocumento5 pagineAcción de Control de Dos Posiciones o de Encendido y ApagadoEvelyn ArredondoNessuna valutazione finora
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDa EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasValutazione: 2.5 su 5 stelle2.5/5 (3)
- Estudio de Impacto Ambiental Del Proyecto Zona Sur Del Corredor Segregado de Alta CapacidadDocumento3 pagineEstudio de Impacto Ambiental Del Proyecto Zona Sur Del Corredor Segregado de Alta Capacidadgloria nina montielNessuna valutazione finora
- Entrenamiento BasicoDocumento11 pagineEntrenamiento BasicoJhonatan OroNessuna valutazione finora
- Control PidDocumento10 pagineControl Pidpiwy017Nessuna valutazione finora
- El Controlador PID BasicoDocumento9 pagineEl Controlador PID BasicoAlex Rodríguez VelardeNessuna valutazione finora
- Efectos Del PidDocumento6 pagineEfectos Del PidRodrigo Zarate MartinezNessuna valutazione finora
- Introduccion PIDDocumento8 pagineIntroduccion PIDjesusdruizvNessuna valutazione finora
- Tutorial PID EspanolDocumento8 pagineTutorial PID EspanolRamiro Cruz SimbaNessuna valutazione finora
- Sugerencias Generales para El Diseño Del Controlador PIDDocumento35 pagineSugerencias Generales para El Diseño Del Controlador PIDgeoswaldNessuna valutazione finora
- PIDDocumento40 paginePIDAlexisVizueteNessuna valutazione finora
- Control PDDocumento12 pagineControl PDrodrigoNessuna valutazione finora
- Controladores PIDDocumento10 pagineControladores PIDAlvaroA.DavilaNessuna valutazione finora
- Lab 6Documento6 pagineLab 6Oliver Gálvez ZavaletaNessuna valutazione finora
- CTM - Tutorial PIDDocumento9 pagineCTM - Tutorial PIDJhon Jairo AnayaNessuna valutazione finora
- Análisis Dinámico de Un ControladorDocumento32 pagineAnálisis Dinámico de Un ControladorJuan Roldán Castillo100% (1)
- Análisis y Diseño de Controladores PID PDFDocumento3 pagineAnálisis y Diseño de Controladores PID PDFAldemir VargasNessuna valutazione finora
- Presentado ADocumento17 paginePresentado AjohnNessuna valutazione finora
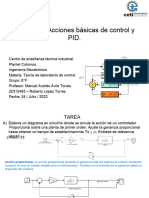
- TAREA 3.1 Acciones Básicas de Control y PIDDocumento20 pagineTAREA 3.1 Acciones Básicas de Control y PIDRoberto Lopez TorresNessuna valutazione finora
- Control DigitalDocumento23 pagineControl DigitalDeimy TorresNessuna valutazione finora
- MECA CA Act3 P3Documento9 pagineMECA CA Act3 P3JESUS RODRIGUEZ0% (1)
- Sistema de Control Proporcional Derivativo IntegralDocumento5 pagineSistema de Control Proporcional Derivativo Integraljuan dugarteNessuna valutazione finora
- Tutorial de Controladores PIDDocumento9 pagineTutorial de Controladores PIDmars1972Nessuna valutazione finora
- CTM - PID TutorialDocumento8 pagineCTM - PID TutorialRaul GarciaNessuna valutazione finora
- Ajuste PID PDFDocumento10 pagineAjuste PID PDFHarold Alexander Rosales VilcaNessuna valutazione finora
- Tarea 4.2 InstrumentacionDocumento10 pagineTarea 4.2 Instrumentacionjuan pabloNessuna valutazione finora
- Ajuste PIDDocumento10 pagineAjuste PIDEloy breña garciaNessuna valutazione finora
- Acción DerivativaDocumento9 pagineAcción Derivativaaaron linkinNessuna valutazione finora
- INFO - Control PIDDocumento19 pagineINFO - Control PIDMiguel Lara100% (1)
- Control Avanzado Lab2 InformeDocumento20 pagineControl Avanzado Lab2 InformeBranco Costa OrtegaNessuna valutazione finora
- Introduccion Al PIDDocumento7 pagineIntroduccion Al PIDGonzalo Roca VasquezNessuna valutazione finora
- Unid4 Sem13Documento40 pagineUnid4 Sem13Diego OmarNessuna valutazione finora
- Controladores PID - Final.derivativoDocumento21 pagineControladores PID - Final.derivativojhonnathanNessuna valutazione finora
- Practica 6 (Control)Documento16 paginePractica 6 (Control)May CepNessuna valutazione finora
- Experiencia 2Documento6 pagineExperiencia 2Ronal HbNessuna valutazione finora
- Metodo ZieglerDocumento13 pagineMetodo ZieglerGustavo HerreraNessuna valutazione finora
- 9.02 Control de P, I, D, PI, PD y PIDDocumento16 pagine9.02 Control de P, I, D, PI, PD y PIDEdgarPalaciosCNessuna valutazione finora
- Trabajo Final Sistema de ControlesDocumento31 pagineTrabajo Final Sistema de ControleslissandorNessuna valutazione finora
- Metodos de SintoniaDocumento4 pagineMetodos de SintoniaJenry UniversitarioNessuna valutazione finora
- Informe #1 de Control de Procesos (Terminado)Documento16 pagineInforme #1 de Control de Procesos (Terminado)Alex RuizNessuna valutazione finora
- Controlador PIDDocumento10 pagineControlador PIDFiliberto Tlalpa ValdezNessuna valutazione finora
- Proyecto de Controladores en El Dominio Del TiempoDocumento25 pagineProyecto de Controladores en El Dominio Del TiemponelsonNessuna valutazione finora
- Reporte - Practica4 Control PIDDocumento9 pagineReporte - Practica4 Control PIDLuis Angel Martinez RamirezNessuna valutazione finora
- Métodos de Sintonización en Un Lazo de ControlDocumento13 pagineMétodos de Sintonización en Un Lazo de ControlayskelNessuna valutazione finora
- Me 5 PDFDocumento26 pagineMe 5 PDFedocampillayNessuna valutazione finora
- 1 - Controlador Clasico de Tres Modos PIDDocumento40 pagine1 - Controlador Clasico de Tres Modos PIDfedegb2010Nessuna valutazione finora
- Laboratorio 5Documento4 pagineLaboratorio 5Carlos Carrillo ZapataNessuna valutazione finora
- Practica 5 Sintonía de Los ControladoresDocumento29 paginePractica 5 Sintonía de Los ControladoresJaneth ReyesNessuna valutazione finora
- Control - Sintonia de Controladores PID Por Ziegler NicholsDocumento12 pagineControl - Sintonia de Controladores PID Por Ziegler NicholsLuis Alberto SD100% (2)
- Control ProporcionalDocumento10 pagineControl ProporcionalKike DersúNessuna valutazione finora
- Laboratorio 5Documento7 pagineLaboratorio 5hederNessuna valutazione finora
- 12 - Maryi Méndez - Paso 4Documento28 pagine12 - Maryi Méndez - Paso 4Arturo CarlosNessuna valutazione finora
- Resumen de ControladoresDocumento7 pagineResumen de ControladoresLEONARDO ALBERTO DIAZ GONZALEZNessuna valutazione finora
- Selección de Controladores: AnónimoDocumento4 pagineSelección de Controladores: AnónimoAlejo MussiniNessuna valutazione finora
- Informe 6 - Lab Control 2Documento8 pagineInforme 6 - Lab Control 2Roger Valenzuela HuamanNessuna valutazione finora
- Analogica Control PIDDocumento33 pagineAnalogica Control PIDSandra ChachaNessuna valutazione finora
- Control y verificación de productos fabricados. FMEE0108Da EverandControl y verificación de productos fabricados. FMEE0108Nessuna valutazione finora
- Filtro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoDa EverandFiltro adaptativo: Mejora de la visión por computadora mediante filtrado adaptativoNessuna valutazione finora
- Turabian Final PDFDocumento147 pagineTurabian Final PDFSaul Agüero BorgesNessuna valutazione finora
- Motor de ArranqueDocumento27 pagineMotor de ArranqueMauricio SarangoNessuna valutazione finora
- Reg 89E GNCDocumento12 pagineReg 89E GNCfabiostefania100% (1)
- 3.2 Estudios TopograficosDocumento7 pagine3.2 Estudios TopograficosRossel Surco DelgadoNessuna valutazione finora
- Planeacion OperativaDocumento7 paginePlaneacion OperativaHugo TrejosNessuna valutazione finora
- 2012 - Magerit - v3 - Libro2 - Catálogo de Elementos - Es - NIPO - 630-12-171-8Documento75 pagine2012 - Magerit - v3 - Libro2 - Catálogo de Elementos - Es - NIPO - 630-12-171-8AngelRodriguezNessuna valutazione finora
- Puyana - Micolta & Palacio 2013 MigraciónFliasColombianas PDFDocumento463 paginePuyana - Micolta & Palacio 2013 MigraciónFliasColombianas PDFAmparo MicoltaNessuna valutazione finora
- Guía de Actividades y Rúbrica de Evaluación - Fase 1 - Aclarar Térninos y Conceptos Del CursoDocumento10 pagineGuía de Actividades y Rúbrica de Evaluación - Fase 1 - Aclarar Térninos y Conceptos Del Cursoluis eduardo charryNessuna valutazione finora
- HOJA DE CALCULO VIENTO NSR 10 v1 3 Procedimeinto SimplificadoDocumento8 pagineHOJA DE CALCULO VIENTO NSR 10 v1 3 Procedimeinto SimplificadoMario Rubiano Paula PaniaguaNessuna valutazione finora
- 2.-Cuanto Pesa El TabiqueDocumento3 pagine2.-Cuanto Pesa El TabiqueLuis Paolo Arancibia SemperteguiNessuna valutazione finora
- Seguridad Por Niveles v-001Documento709 pagineSeguridad Por Niveles v-001Jesus BelinchonNessuna valutazione finora
- Contenido Del Agua en El Gas Natural TERMODINAMICADocumento2 pagineContenido Del Agua en El Gas Natural TERMODINAMICAJoseMariaMonteroNessuna valutazione finora
- La Formacion Del Profesorado Como Factor Decisivo de La Excelencia EducativaDocumento20 pagineLa Formacion Del Profesorado Como Factor Decisivo de La Excelencia EducativajomoramaNessuna valutazione finora
- Estudio Lumínico EstadioDocumento14 pagineEstudio Lumínico EstadioJonathan Contreras GarciaNessuna valutazione finora
- Catalogo Peak Tour 2013 - Equipaje, Mochilas, Porta Laptops, CosmetiquerasDocumento40 pagineCatalogo Peak Tour 2013 - Equipaje, Mochilas, Porta Laptops, CosmetiquerasKristophe Al TziganiNessuna valutazione finora
- Memoria DescriptivaDocumento6 pagineMemoria DescriptivaAlexNessuna valutazione finora
- Redefiniendo La GlobalizacionDocumento6 pagineRedefiniendo La GlobalizacionMariNessuna valutazione finora
- Tema 02 - Admision CorrespondenciaDocumento106 pagineTema 02 - Admision CorrespondenciapatriciaNessuna valutazione finora
- La Lectura en MéxicoDocumento5 pagineLa Lectura en MéxicoCarla Airam GreyNessuna valutazione finora
- TESIS GreezzyMendozaDocumento454 pagineTESIS GreezzyMendozaAgripino QuispeNessuna valutazione finora
- Fundamentos de Motores Diesel-1Documento45 pagineFundamentos de Motores Diesel-1Frankie RuizNessuna valutazione finora
- VBa Excel 2010Documento14 pagineVBa Excel 2010Harry ThedirtyNessuna valutazione finora
- Diseño y Análisis Psicométrico de Un Instrumento para Detectar Presencia de Ciberbullying en Un Contexto EscolarDocumento14 pagineDiseño y Análisis Psicométrico de Un Instrumento para Detectar Presencia de Ciberbullying en Un Contexto EscolarRuth RosadoNessuna valutazione finora
- ParteDocumento164 paginePartesamar2008Nessuna valutazione finora
- CurpDocumento1 paginaCurpSebastian GarbalenaNessuna valutazione finora
- Guia para Plan de Protección AmbientalDocumento6 pagineGuia para Plan de Protección AmbientalMacarena Andrea FaundezNessuna valutazione finora
- Atención A La Diversidad Desde La Programación de AulaDocumento13 pagineAtención A La Diversidad Desde La Programación de AulaLeti AquinoNessuna valutazione finora
- Energia GeotermicaDocumento23 pagineEnergia GeotermicaJose GomezNessuna valutazione finora