Potrebbero piacerti anche
- Standards: 1 Tolerances 1.1 Electrical DataDocumento9 pagineStandards: 1 Tolerances 1.1 Electrical DataRifaldy SwasetyasaktNessuna valutazione finora
- IEC Motor StandardsDocumento9 pagineIEC Motor Standardssubramanyanvenkat6185100% (1)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionValutazione: 5 su 5 stelle5/5 (1)
- Compact 32-Point Solid-State 24V DC Source Output Module: Installation InstructionsDocumento24 pagineCompact 32-Point Solid-State 24V DC Source Output Module: Installation InstructionsThanh BaronNessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- Enclosures TechnicalDocumento16 pagineEnclosures TechnicalAnonymous rYZyQQot55Nessuna valutazione finora
- Split-Air Low Noise Unit SpecsDocumento11 pagineSplit-Air Low Noise Unit SpecsRacu TudorNessuna valutazione finora
- Operating Instructions for Synchronous GeneratorDocumento56 pagineOperating Instructions for Synchronous Generatorkazishah100% (1)
- Industrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionDa EverandIndustrial Applications of Infrared Thermography: How Infrared Analysis Can be Used to Improve Equipment InspectionValutazione: 4.5 su 5 stelle4.5/5 (3)
- 1646 - Generator Operating ManualDocumento52 pagine1646 - Generator Operating ManualmaronnamNessuna valutazione finora
- Protection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsDa EverandProtection of Substation Critical Equipment Against Intentional Electromagnetic ThreatsNessuna valutazione finora
- Medium Voltage Swgr15Documento3 pagineMedium Voltage Swgr15kjfensNessuna valutazione finora
- Quadruple 3-State Buffers Oe LowDocumento10 pagineQuadruple 3-State Buffers Oe LowDistribuidorIBoolPedregalDeSantoDomingoNessuna valutazione finora
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideDa EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideValutazione: 4 su 5 stelle4/5 (8)
- Redundancy Module Quint-Diode/40: 1. Short DescriptionDocumento6 pagineRedundancy Module Quint-Diode/40: 1. Short Description54045114Nessuna valutazione finora
- Reflow Soldering: Apparatus and Heat Transfer ProcessesDa EverandReflow Soldering: Apparatus and Heat Transfer ProcessesNessuna valutazione finora
- 74HCT00Documento8 pagine74HCT00Sadikul FuadNessuna valutazione finora
- DM7406 FairchildDocumento4 pagineDM7406 FairchildWilliam Aguirre LozaNessuna valutazione finora
- Series: Swi24-E Description: Ac-Dc Power SupplyDocumento5 pagineSeries: Swi24-E Description: Ac-Dc Power SupplyTestronicpartsNessuna valutazione finora
- 7408Documento3 pagine7408Kunal KundanamNessuna valutazione finora
- Quadruple 3-State Buffers Oe HighDocumento10 pagineQuadruple 3-State Buffers Oe HighDistribuidorIBoolPedregalDeSantoDomingoNessuna valutazione finora
- 2SC5885Documento4 pagine2SC5885ch3o10836266Nessuna valutazione finora
- DatasheetDocumento3 pagineDatasheetJorge Alberto Castaño OrtegaNessuna valutazione finora
- Diagramas Electricos Espesador 21962ADocumento1.131 pagineDiagramas Electricos Espesador 21962AAndres RomeroNessuna valutazione finora
- ATS22C41Q: Product Data SheetDocumento9 pagineATS22C41Q: Product Data SheetDheeraj YadavNessuna valutazione finora
- DM7406 Hex Inverting Buffers With High Voltage Open-Collector OutputsDocumento4 pagineDM7406 Hex Inverting Buffers With High Voltage Open-Collector OutputsShyamsundar JenaNessuna valutazione finora
- DM7414 Hex Inverter With Schmitt Trigger Inputs: General DescriptionDocumento6 pagineDM7414 Hex Inverter With Schmitt Trigger Inputs: General DescriptionGeorge Rahul PaulNessuna valutazione finora
- AN15524A Data Sheet - Vertical Deflection ICDocumento17 pagineAN15524A Data Sheet - Vertical Deflection ICvasilesicoeNessuna valutazione finora
- Operating Instructions for Precision Air Conditioning UnitsDocumento81 pagineOperating Instructions for Precision Air Conditioning UnitsFA DGNessuna valutazione finora
- E10 User Manual V1.15Documento28 pagineE10 User Manual V1.15Roger FarjeNessuna valutazione finora
- Yudian AI Series Industrial Controller Operation InstructionDocumento30 pagineYudian AI Series Industrial Controller Operation InstructionMatt WrightNessuna valutazione finora
- Quad 2-Input NAND Gates with Open-Collector Outputs GuideDocumento4 pagineQuad 2-Input NAND Gates with Open-Collector Outputs GuideΓΙΩΡΓΟΣ ΚΑΚΑΦΛΙΚΑΣNessuna valutazione finora
- Explosion Protection Wall Chart BASEEFADocumento1 paginaExplosion Protection Wall Chart BASEEFAweby98Nessuna valutazione finora
- REX-C100/C400/C410/C700/C900: 1. Product CheckDocumento8 pagineREX-C100/C400/C410/C700/C900: 1. Product CheckHmilkNessuna valutazione finora
- DatasheetDocumento3 pagineDatasheetelita04Nessuna valutazione finora
- Uploads Files PVxx8M872NN Air Cooling en Rev01Documento6 pagineUploads Files PVxx8M872NN Air Cooling en Rev01Miguel LnNessuna valutazione finora
- ULN2068BDocumento6 pagineULN2068BDiego Asicona100% (1)
- Uid Common Tech-Spec 08-13Documento5 pagineUid Common Tech-Spec 08-13Nasir KhanNessuna valutazione finora
- Rotating Electrical Machines GuideDocumento35 pagineRotating Electrical Machines Guideagarwood0% (1)
- Kalorimetar Data Sheet UH50 - UH106 101kDocumento15 pagineKalorimetar Data Sheet UH50 - UH106 101kbobesponjakockaloneNessuna valutazione finora
- Instruction Manual: Model 7SL High/Low LimitrolDocumento48 pagineInstruction Manual: Model 7SL High/Low LimitrolkmpoulosNessuna valutazione finora
- 1769 Iq32tDocumento20 pagine1769 Iq32tHilder Ramirez PuellesNessuna valutazione finora
- E1000 User ManualDocumento119 pagineE1000 User ManualMárcio Fernandes78% (9)
- 74LS05Documento6 pagine74LS05Tammy WashingtonNessuna valutazione finora
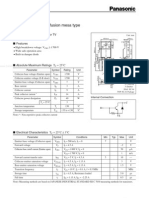
- Silicon NPN Triple Diffusion Mesa Type: Power TransistorsDocumento3 pagineSilicon NPN Triple Diffusion Mesa Type: Power TransistorsCatarroCatarroNessuna valutazione finora
- BP5048 24Documento3 pagineBP5048 24Engr Tabrick AshrafNessuna valutazione finora
- Octal Inverter Buffers/Drivers With Open Drain High Voltage OutputsDocumento8 pagineOctal Inverter Buffers/Drivers With Open Drain High Voltage OutputsВоваNessuna valutazione finora
- 74LS03Documento6 pagine74LS03tuzarahulNessuna valutazione finora
- IEC 60439-1 Switchboard TestsDocumento29 pagineIEC 60439-1 Switchboard TestsHaldirLeaoNessuna valutazione finora
- Manual Carel 1Documento16 pagineManual Carel 1bircsa10Nessuna valutazione finora
- Two-Phase Brushless Fan Motor Driver: 3098B-DIP10SDocumento5 pagineTwo-Phase Brushless Fan Motor Driver: 3098B-DIP10Smax_speed45Nessuna valutazione finora
- F02 Brochure 09-2010Documento22 pagineF02 Brochure 09-2010Giovanni DiniNessuna valutazione finora
- Abb VariadorDocumento52 pagineAbb VariadorPa TricioNessuna valutazione finora
- Bus Bar Selection 20338744 - 0606073419Documento40 pagineBus Bar Selection 20338744 - 0606073419yac128Nessuna valutazione finora
- Instructions and Advices To Use The Electronic Controller Logik 19Documento31 pagineInstructions and Advices To Use The Electronic Controller Logik 19Muhammad Zeeshan SaeedNessuna valutazione finora
- SLDDocumento1 paginaSLDsumitsharma2010Nessuna valutazione finora
- Tenancy Contract: Date: Landlord: Tenant: Subject of Tenancy: Period of Tenancy: To: From: Rent: Terms of PaymentDocumento2 pagineTenancy Contract: Date: Landlord: Tenant: Subject of Tenancy: Period of Tenancy: To: From: Rent: Terms of Paymentsumitsharma2010Nessuna valutazione finora
- SLDDocumento1 paginaSLDsumitsharma2010Nessuna valutazione finora
- HinjewadiDocumento1 paginaHinjewadisumitsharma2010Nessuna valutazione finora
- Relay Settings 31.01.2018Documento16 pagineRelay Settings 31.01.2018sumitsharma2010Nessuna valutazione finora
- Break UpDocumento1 paginaBreak Upsumitsharma2010Nessuna valutazione finora
- Chapter 142791 PDFDocumento57 pagineChapter 142791 PDFNuwan BandaraNessuna valutazione finora
- Medical expense report with itemized bills and totalsDocumento6 pagineMedical expense report with itemized bills and totalssumitsharma2010Nessuna valutazione finora
- Complete ReportDocumento29 pagineComplete Reportsumitsharma20100% (1)
- NocDocumento1 paginaNocsumitsharma2010Nessuna valutazione finora
- Technical Specification For Software 877Documento14 pagineTechnical Specification For Software 877sumitsharma2010Nessuna valutazione finora
- Electrical Safety AuditDocumento2 pagineElectrical Safety Auditsumitsharma2010Nessuna valutazione finora
- Hospital BillDocumento2 pagineHospital Billsumitsharma2010Nessuna valutazione finora
- Iec FaultDocumento16 pagineIec Faultsumitsharma2010Nessuna valutazione finora
- Center of Gravity 1Documento9 pagineCenter of Gravity 1sumitsharma2010Nessuna valutazione finora
- August Expenses ClaimDocumento2 pagineAugust Expenses Claimsumitsharma2010Nessuna valutazione finora
- High Impedance Protection Settings Tool Installation WalkthroughDocumento2 pagineHigh Impedance Protection Settings Tool Installation Walkthroughsumitsharma2010Nessuna valutazione finora
- Cable No. Specification Length Voltage Connection Point ADocumento20 pagineCable No. Specification Length Voltage Connection Point Asumitsharma2010Nessuna valutazione finora
- Detail EnggDocumento1 paginaDetail Enggsumitsharma2010Nessuna valutazione finora
- Base Case - 2017 MS ResultsDocumento2 pagineBase Case - 2017 MS Resultssumitsharma2010Nessuna valutazione finora
- PSS ToolsDocumento1 paginaPSS Toolssumitsharma2010Nessuna valutazione finora
- Electrical Safety AuditDocumento2 pagineElectrical Safety Auditsumitsharma2010Nessuna valutazione finora
- 7sr23 87 HI BBPDocumento8 pagine7sr23 87 HI BBPsumitsharma2010Nessuna valutazione finora
- CT VT SummaryDocumento1 paginaCT VT Summarysumitsharma2010Nessuna valutazione finora
- CT-VT SummaryDocumento1 paginaCT-VT Summarysumitsharma2010Nessuna valutazione finora
- Power System Study - PSSDocumento1 paginaPower System Study - PSSsumitsharma2010Nessuna valutazione finora
- Annexure 4.1 - HA DigSilent Report Without FilterDocumento4 pagineAnnexure 4.1 - HA DigSilent Report Without Filtersumitsharma2010Nessuna valutazione finora
- Annexure 4.1 - HA DigSilent Report Without FilterDocumento4 pagineAnnexure 4.1 - HA DigSilent Report Without Filtersumitsharma2010Nessuna valutazione finora
- Annexure 4.1 - HA DigSilent Report Without FilterDocumento4 pagineAnnexure 4.1 - HA DigSilent Report Without Filtersumitsharma2010Nessuna valutazione finora
- P 5101 GraphsDocumento1 paginaP 5101 Graphssumitsharma2010Nessuna valutazione finora
- 1.2 - Venn Diagram and Complement of A SetDocumento6 pagine1.2 - Venn Diagram and Complement of A SetKaden YeoNessuna valutazione finora
- Exercises 6 Workshops 9001 - WBP1Documento1 paginaExercises 6 Workshops 9001 - WBP1rameshqcNessuna valutazione finora
- Krok2 - Medicine - 2010Documento27 pagineKrok2 - Medicine - 2010Badriya YussufNessuna valutazione finora
- Report Emerging TechnologiesDocumento97 pagineReport Emerging Technologiesa10b11Nessuna valutazione finora
- 2010 - Impact of Open Spaces On Health & WellbeingDocumento24 pagine2010 - Impact of Open Spaces On Health & WellbeingmonsNessuna valutazione finora
- Iso 9001 CRMDocumento6 pagineIso 9001 CRMleovenceNessuna valutazione finora
- DELcraFT Works CleanEra ProjectDocumento31 pagineDELcraFT Works CleanEra Projectenrico_britaiNessuna valutazione finora
- GIS Multi-Criteria Analysis by Ordered Weighted Averaging (OWA) : Toward An Integrated Citrus Management StrategyDocumento17 pagineGIS Multi-Criteria Analysis by Ordered Weighted Averaging (OWA) : Toward An Integrated Citrus Management StrategyJames DeanNessuna valutazione finora
- TWP10Documento100 pagineTWP10ed9481Nessuna valutazione finora
- Circular Flow of Process 4 Stages Powerpoint Slides TemplatesDocumento9 pagineCircular Flow of Process 4 Stages Powerpoint Slides TemplatesAryan JainNessuna valutazione finora
- John Hay People's Alternative Coalition Vs Lim - 119775 - October 24, 2003 - JDocumento12 pagineJohn Hay People's Alternative Coalition Vs Lim - 119775 - October 24, 2003 - JFrances Ann TevesNessuna valutazione finora
- FX15Documento32 pagineFX15Jeferson MarceloNessuna valutazione finora
- Yellowstone Food WebDocumento4 pagineYellowstone Food WebAmsyidi AsmidaNessuna valutazione finora
- AsiaSat 7 at 105Documento14 pagineAsiaSat 7 at 105rahman200387Nessuna valutazione finora
- Artist Biography: Igor Stravinsky Was One of Music's Truly Epochal Innovators No Other Composer of TheDocumento2 pagineArtist Biography: Igor Stravinsky Was One of Music's Truly Epochal Innovators No Other Composer of TheUy YuiNessuna valutazione finora
- Chem 102 Week 5Documento65 pagineChem 102 Week 5CAILA CACHERONessuna valutazione finora
- ASMOPS 2016 - International Invitation PHILIPPINEDocumento4 pagineASMOPS 2016 - International Invitation PHILIPPINEMl Phil0% (3)
- Ujian Madrasah Kelas VIDocumento6 pagineUjian Madrasah Kelas VIrahniez faurizkaNessuna valutazione finora
- Leaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeDocumento6 pagineLeaked David Fry II Conversation Regarding Loopholes and Embezzlement at AFK Gamer LoungeAnonymous iTNFz0a0Nessuna valutazione finora
- Pradhan Mantri Gramin Digital Saksharta Abhiyan (PMGDISHA) Digital Literacy Programme For Rural CitizensDocumento2 paginePradhan Mantri Gramin Digital Saksharta Abhiyan (PMGDISHA) Digital Literacy Programme For Rural Citizenssairam namakkalNessuna valutazione finora
- Difference Between Mark Up and MarginDocumento2 pagineDifference Between Mark Up and MarginIan VinoyaNessuna valutazione finora
- Cold Rolled Steel Sections - Specification: Kenya StandardDocumento21 pagineCold Rolled Steel Sections - Specification: Kenya StandardPEng. Tech. Alvince KoreroNessuna valutazione finora
- Rounded Scoodie Bobwilson123 PDFDocumento3 pagineRounded Scoodie Bobwilson123 PDFStefania MoldoveanuNessuna valutazione finora
- Onan Service Manual MDJA MDJB MDJC MDJE MDJF Marine Diesel Genset Engines 974-0750Documento92 pagineOnan Service Manual MDJA MDJB MDJC MDJE MDJF Marine Diesel Genset Engines 974-0750GreenMountainGenerators80% (10)
- NewspaperDocumento11 pagineNewspaperКристина ОрёлNessuna valutazione finora
- Dole-Oshc Tower Crane Inspection ReportDocumento6 pagineDole-Oshc Tower Crane Inspection ReportDaryl HernandezNessuna valutazione finora
- Gas Dehydration (ENGINEERING DESIGN GUIDELINE)Documento23 pagineGas Dehydration (ENGINEERING DESIGN GUIDELINE)Tu Dang TrongNessuna valutazione finora
- GlastonburyDocumento4 pagineGlastonburyfatimazahrarahmani02Nessuna valutazione finora
- Java development user guide eclipse tutorialDocumento322 pagineJava development user guide eclipse tutorialVivek ParmarNessuna valutazione finora
- ISO 9001:2015 Explained, Fourth Edition GuideDocumento3 pagineISO 9001:2015 Explained, Fourth Edition GuideiresendizNessuna valutazione finora
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDa EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionValutazione: 4.5 su 5 stelle4.5/5 (3)
- Handbook of Mechanical and Materials EngineeringDa EverandHandbook of Mechanical and Materials EngineeringValutazione: 5 su 5 stelle5/5 (4)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDa EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseValutazione: 4.5 su 5 stelle4.5/5 (50)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsDa EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNessuna valutazione finora
- Quantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationDa EverandQuantum Mechanics 4: Spin, Lasers, Pauli Exclusion & Barrier PenetrationValutazione: 1 su 5 stelle1/5 (1)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedDa EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedValutazione: 5 su 5 stelle5/5 (1)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationDa EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationValutazione: 4 su 5 stelle4/5 (18)
- The Laws of Thermodynamics: A Very Short IntroductionDa EverandThe Laws of Thermodynamics: A Very Short IntroductionValutazione: 4.5 su 5 stelle4.5/5 (10)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Introduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionDa EverandIntroduction to Applied Thermodynamics: The Commonwealth and International Library: Mechanical Engineering DivisionValutazione: 2.5 su 5 stelle2.5/5 (3)
- Control of Power Electronic Converters and Systems: Volume 1Da EverandControl of Power Electronic Converters and Systems: Volume 1Valutazione: 5 su 5 stelle5/5 (1)
- Oil and Gas Pipelines: Integrity and Safety HandbookDa EverandOil and Gas Pipelines: Integrity and Safety HandbookNessuna valutazione finora
- Albert Einstein's Theory Of Relativity Explained SimplyDa EverandAlbert Einstein's Theory Of Relativity Explained SimplyNessuna valutazione finora
- Machinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeDa EverandMachinery Failure Analysis Handbook: Sustain Your Operations and Maximize UptimeValutazione: 3.5 su 5 stelle3.5/5 (4)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsDa EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNessuna valutazione finora
- Design of Foundations for Offshore Wind TurbinesDa EverandDesign of Foundations for Offshore Wind TurbinesValutazione: 5 su 5 stelle5/5 (3)
- 1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideDa Everand1,001 Questions & Answers for the CWI Exam: Welding Metallurgy and Visual Inspection Study GuideValutazione: 3.5 su 5 stelle3.5/5 (7)
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- Three Laws of Nature: A Little Book on ThermodynamicsDa EverandThree Laws of Nature: A Little Book on ThermodynamicsValutazione: 4.5 su 5 stelle4.5/5 (10)