Potrebbero piacerti anche
- Digital Image ProcessingDocumento15 pagineDigital Image ProcessingDeepak GourNessuna valutazione finora
- Basics of Image ProcessingDocumento38 pagineBasics of Image ProcessingKarthick VijayanNessuna valutazione finora
- Digital Image Processing LAB MANUAL 6th Sem-FinalDocumento20 pagineDigital Image Processing LAB MANUAL 6th Sem-FinalKapil KumarNessuna valutazione finora
- BM2406 Digital Image Processing Lab ManualDocumento24 pagineBM2406 Digital Image Processing Lab ManualDeepak DennisonNessuna valutazione finora
- Computer Graphics Multimedia Notes 1Documento113 pagineComputer Graphics Multimedia Notes 1bhuvanaNessuna valutazione finora
- Basic Relationships Between PixelsDocumento15 pagineBasic Relationships Between PixelsAnonymous aEBzOzAcX7Nessuna valutazione finora
- Machine Learning AssignmentDocumento55 pagineMachine Learning AssignmentAkashNessuna valutazione finora
- Digital Image Representation StepsDocumento26 pagineDigital Image Representation StepsrenukaNessuna valutazione finora
- Unit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two ClassesDocumento16 pagineUnit-Ii Chapter-3 Beyond Binary Classification Handling More Than Two Classesproducts infoNessuna valutazione finora
- KTU MCA SyllabusDocumento222 pagineKTU MCA SyllabusNajiya NajiNessuna valutazione finora
- Ec 1009 - Digital Image ProcessingDocumento30 pagineEc 1009 - Digital Image Processingainugiri75% (4)
- Filled Area PrimitivesDocumento69 pagineFilled Area Primitivesshyam4joshi-1Nessuna valutazione finora
- Computer Graphics Solved Mcqs Set 25Documento6 pagineComputer Graphics Solved Mcqs Set 25MS WaseemNessuna valutazione finora
- 18CS61 - SS and C - Module 5Documento36 pagine18CS61 - SS and C - Module 5Juice KudityaNessuna valutazione finora
- Lab 5 Best First Search For SchedulingDocumento3 pagineLab 5 Best First Search For SchedulingchakravarthyashokNessuna valutazione finora
- Automatic ThresholdingDocumento18 pagineAutomatic ThresholdingMuhammad Usman KhanNessuna valutazione finora
- Introduction To Data Science With R Programming Language Lab RecordDocumento20 pagineIntroduction To Data Science With R Programming Language Lab RecordLakshmi sarvani videla Lecturer in Computer ScienceNessuna valutazione finora
- Opencv Interview QuestionsDocumento3 pagineOpencv Interview QuestionsYogesh YadavNessuna valutazione finora
- Digital Image Processing Assignment 2 Chapters 2-3Documento3 pagineDigital Image Processing Assignment 2 Chapters 2-3Uzair Ahmad0% (1)
- Chapter 7Documento54 pagineChapter 7gaurav paandeyNessuna valutazione finora
- Basic Program of GraphicsDocumento19 pagineBasic Program of GraphicsRavindra NawaleNessuna valutazione finora
- What Is Difference Between Backtracking and Branch and Bound MethodDocumento4 pagineWhat Is Difference Between Backtracking and Branch and Bound MethodMahi On D Rockzz67% (3)
- Ec 1034 - Digital Image ProcessingDocumento15 pagineEc 1034 - Digital Image ProcessingSudharsan PadmanabhanNessuna valutazione finora
- EC 8791 ERTS 2 MarksDocumento24 pagineEC 8791 ERTS 2 Marksdeenandhini b100% (2)
- Final PPTDocumento39 pagineFinal PPTNitesh KumarNessuna valutazione finora
- Lab Manual B.Sc. (CA) : Department of Computer Science Ccb-2P2: Laboratory Course - IiDocumento31 pagineLab Manual B.Sc. (CA) : Department of Computer Science Ccb-2P2: Laboratory Course - IiJennifer Ledesma-PidoNessuna valutazione finora
- Ec3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Documento41 pagineEc3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Music LoverNessuna valutazione finora
- Digital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier TransformDocumento4 pagineDigital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier Transformraw.junkNessuna valutazione finora
- Computer Graphics (CG CHAP 3)Documento15 pagineComputer Graphics (CG CHAP 3)Vuggam Venkatesh0% (1)
- Data Warehousing and Data Mining Course OverviewDocumento249 pagineData Warehousing and Data Mining Course OverviewSalmanNessuna valutazione finora
- Image Processing QBDocumento29 pagineImage Processing QBsubramanyam62100% (1)
- Predictive coding: Lossless and lossy approaches in 40 charactersDocumento5 paginePredictive coding: Lossless and lossy approaches in 40 charactersKrishanu ModakNessuna valutazione finora
- Chapter 10Documento51 pagineChapter 10Raji Prasad100% (1)
- Assignment On Digital Image ProcessingDocumento7 pagineAssignment On Digital Image ProcessingAshish Saikia0% (1)
- Amity University Haryana: Digital Image Processing Lab Practical FileDocumento20 pagineAmity University Haryana: Digital Image Processing Lab Practical FileRamakrishna MaligeyNessuna valutazione finora
- Final Exam - Design and Analysis of Algorithms - Fall 2010 Semester - SolDocumento7 pagineFinal Exam - Design and Analysis of Algorithms - Fall 2010 Semester - SolAbdul RaufNessuna valutazione finora
- GA LAB Manual-1Documento33 pagineGA LAB Manual-1Sundar Shahi ThakuriNessuna valutazione finora
- Java Exception HandlingDocumento41 pagineJava Exception HandlingAparna EVNessuna valutazione finora
- Back Face DetectionDocumento13 pagineBack Face Detectionpalanirec100% (1)
- DS4152 Statistical Signal ProcessingDocumento2 pagineDS4152 Statistical Signal Processingiiecea 2122Nessuna valutazione finora
- AL3391 AI UNIT 4 NOTES EduEnggDocumento42 pagineAL3391 AI UNIT 4 NOTES EduEnggKarthik king KNessuna valutazione finora
- AN1630 - High Performance Communication NetworksDocumento17 pagineAN1630 - High Performance Communication NetworksPavithra SunNessuna valutazione finora
- Alzheimer's Disease PHD PPT 2019Documento14 pagineAlzheimer's Disease PHD PPT 2019RammurtiRawat100% (1)
- Week 2 Coding Assignment Name: Priyanka Indra Roll No.: 84 Dept: CSE1 Sem:6Documento18 pagineWeek 2 Coding Assignment Name: Priyanka Indra Roll No.: 84 Dept: CSE1 Sem:6Priyanka IndraNessuna valutazione finora
- C Programming Array GuideDocumento27 pagineC Programming Array GuideRadhika AjadkaNessuna valutazione finora
- Data Compression Btech NotesDocumento32 pagineData Compression Btech NotesHarsh RaiNessuna valutazione finora
- Basics of Image Processing in Matlab Lab File PDFDocumento86 pagineBasics of Image Processing in Matlab Lab File PDFjagroop kaurNessuna valutazione finora
- Design and Analysis of Algorithms: Question BankDocumento7 pagineDesign and Analysis of Algorithms: Question BankDr-Pawan Singh KoriNessuna valutazione finora
- Question Bank: Srinivasa Institute of Engineering and TechnologyDocumento45 pagineQuestion Bank: Srinivasa Institute of Engineering and TechnologyVijay M100% (2)
- GE8151 Python Programming Unit 2 Question Bank With Example CodeDocumento37 pagineGE8151 Python Programming Unit 2 Question Bank With Example CodeN.VivekananthamoorthyNessuna valutazione finora
- Image Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. WoodsDocumento130 pagineImage Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. Woodskparisa05Nessuna valutazione finora
- Unit 2 FodDocumento27 pagineUnit 2 Fodit hodNessuna valutazione finora
- Fundamentals of Image Processing Lab Manual 2014 PDFDocumento68 pagineFundamentals of Image Processing Lab Manual 2014 PDFSagar PatelNessuna valutazione finora
- Lab Manual 15B17CI574 Artificial Intelligence Lab PDFDocumento45 pagineLab Manual 15B17CI574 Artificial Intelligence Lab PDFAviral TanwarNessuna valutazione finora
- 2D TransformationDocumento31 pagine2D Transformationmohanmech2006886Nessuna valutazione finora
- EL-315 Signals - Systems Lab ManualDocumento145 pagineEL-315 Signals - Systems Lab ManualAL Rizwan AsifNessuna valutazione finora
- Practical-1: Fundamentals of Image ProcessingDocumento8 paginePractical-1: Fundamentals of Image Processingnandkishor joshiNessuna valutazione finora
- Image Processing: ObjectiveDocumento6 pagineImage Processing: ObjectiveElsadig OsmanNessuna valutazione finora
- Multimedia System Design Lab 7 PDFDocumento10 pagineMultimedia System Design Lab 7 PDFCh Bilal MakenNessuna valutazione finora
- Study & Run All The Programs in Matlab & All Functions Also: List of ExperimentsDocumento10 pagineStudy & Run All The Programs in Matlab & All Functions Also: List of Experimentsmayank5sajheNessuna valutazione finora
- Pro Bono 2021-22 - Project Description FormDocumento4 paginePro Bono 2021-22 - Project Description FormDeepak DennisonNessuna valutazione finora
- Heart Lung MachineDocumento20 pagineHeart Lung MachineDeepak DennisonNessuna valutazione finora
- Calculation For Infusion PumpDocumento12 pagineCalculation For Infusion PumpDeepak DennisonNessuna valutazione finora
- Lecture 13Documento6 pagineLecture 13Qaisar HayatNessuna valutazione finora
- Pollution: Field StudyDocumento12 paginePollution: Field StudyDeepak DennisonNessuna valutazione finora
- Microprocessor 8085, 86, 51 Instruction SetDocumento15 pagineMicroprocessor 8085, 86, 51 Instruction SetDeepak DennisonNessuna valutazione finora
- Monitoring Tool in ScienceDocumento10 pagineMonitoring Tool in ScienceCatherine RenanteNessuna valutazione finora
- Networks Lab Assignment 1Documento2 pagineNetworks Lab Assignment 1006honey006Nessuna valutazione finora
- Edexcel A2 Biology 6BI06Documento7 pagineEdexcel A2 Biology 6BI06abhayNessuna valutazione finora
- SRS documentation of Virtual Classroom System , SRS documentation of Personal Identity Management ,SRS documentation of EMentoring for women system , SRS Documentation of Employee Performance Management SRS Documentation of Online TicketingDocumento79 pagineSRS documentation of Virtual Classroom System , SRS documentation of Personal Identity Management ,SRS documentation of EMentoring for women system , SRS Documentation of Employee Performance Management SRS Documentation of Online Ticketingsaravanakumar1896% (26)
- Module-1 STSDocumento35 pagineModule-1 STSMARYLIZA SAEZNessuna valutazione finora
- Course Handbook MSC Marketing Sept2022Documento58 pagineCourse Handbook MSC Marketing Sept2022Tauseef JamalNessuna valutazione finora
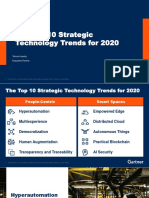
- The Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerDocumento31 pagineThe Top 10 Strategic Technology Trends For 2020: Tomas Huseby Executive PartnerCarlos Stuars Echeandia CastilloNessuna valutazione finora
- Excel Bill of Materials Bom TemplateDocumento8 pagineExcel Bill of Materials Bom TemplateRavi ChhawdiNessuna valutazione finora
- Skype Sex - Date of Birth - Nationality: Curriculum VitaeDocumento4 pagineSkype Sex - Date of Birth - Nationality: Curriculum VitaeSasa DjurasNessuna valutazione finora
- American Woodworker No 171 April-May 2014Documento76 pagineAmerican Woodworker No 171 April-May 2014Darius White75% (4)
- PLJ-8LED Manual Translation enDocumento13 paginePLJ-8LED Manual Translation enandrey100% (2)
- 2.5L ENGINE Chevy Tracker 1999Documento580 pagine2.5L ENGINE Chevy Tracker 1999andres german romeroNessuna valutazione finora
- SSNDocumento1.377 pagineSSNBrymo Suarez100% (9)
- Offshore Wind Turbine 6mw Robust Simple EfficientDocumento4 pagineOffshore Wind Turbine 6mw Robust Simple EfficientCristian Jhair PerezNessuna valutazione finora
- 8086 Microprocessor: J Srinivasa Rao Govt Polytechnic Kothagudem KhammamDocumento129 pagine8086 Microprocessor: J Srinivasa Rao Govt Polytechnic Kothagudem KhammamAnonymous J32rzNf6ONessuna valutazione finora
- Table of Contents and Executive SummaryDocumento38 pagineTable of Contents and Executive SummarySourav Ojha0% (1)
- Module 3 Paired and Two Sample T TestDocumento18 pagineModule 3 Paired and Two Sample T TestLastica, Geralyn Mae F.Nessuna valutazione finora
- Aveva Installation GuideDocumento48 pagineAveva Installation GuideNico Van HoofNessuna valutazione finora
- Divide Fractions by Fractions Lesson PlanDocumento12 pagineDivide Fractions by Fractions Lesson PlanEunice TrinidadNessuna valutazione finora
- Wargames Illustrated #115Documento64 pagineWargames Illustrated #115Анатолий Золотухин100% (1)
- Required Reading For Piano Technicians PDFDocumento28 pagineRequired Reading For Piano Technicians PDFNinaNessuna valutazione finora
- Purp Com Lesson 1.2Documento2 paginePurp Com Lesson 1.2bualjuldeeangelNessuna valutazione finora
- Lec 5Documento22 pagineLec 5Abcdefgh EfghabcdNessuna valutazione finora
- 4th Summative Test Science 6Documento5 pagine4th Summative Test Science 6ANNALIZA FIECASNessuna valutazione finora
- CAM TOOL Solidworks PDFDocumento6 pagineCAM TOOL Solidworks PDFHussein ZeinNessuna valutazione finora
- Batool2019 Article ANanocompositePreparedFromMagn PDFDocumento10 pagineBatool2019 Article ANanocompositePreparedFromMagn PDFmazharNessuna valutazione finora
- Matador - : Medical Advanced Training in An Artificial Distributed EnvironmentDocumento25 pagineMatador - : Medical Advanced Training in An Artificial Distributed EnvironmentNauman ChaudaryNessuna valutazione finora
- EE114-1 Homework 2: Building Electrical SystemsDocumento2 pagineEE114-1 Homework 2: Building Electrical SystemsGuiaSanchezNessuna valutazione finora
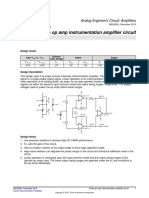
- Opamp TIDocumento5 pagineOpamp TIAmogh Gajaré100% (1)
- Lesson Plan 12 Climate ChangeDocumento5 pagineLesson Plan 12 Climate ChangeRey Bello MalicayNessuna valutazione finora
- Edward's Menagerie: Dogs: 50 canine crochet patternsDa EverandEdward's Menagerie: Dogs: 50 canine crochet patternsValutazione: 3 su 5 stelle3/5 (5)
- Jack Watson's Complete Guide to Creating Black and White Female Glamour Images - From Nudes to FashionDa EverandJack Watson's Complete Guide to Creating Black and White Female Glamour Images - From Nudes to FashionValutazione: 2.5 su 5 stelle2.5/5 (3)
- Be Useful: Seven Tools for Life by Arnold Schwarzenegger: Key Takeaways, Summary & AnalysisDa EverandBe Useful: Seven Tools for Life by Arnold Schwarzenegger: Key Takeaways, Summary & AnalysisNessuna valutazione finora
- What Becomes a Legend Most: A Biography of Richard AvedonDa EverandWhat Becomes a Legend Most: A Biography of Richard AvedonNessuna valutazione finora
- Street Photography: The Art of Capturing the Candid MomentDa EverandStreet Photography: The Art of Capturing the Candid MomentValutazione: 4 su 5 stelle4/5 (12)
- Betty Page Confidential: Featuring Never-Before Seen PhotographsDa EverandBetty Page Confidential: Featuring Never-Before Seen PhotographsValutazione: 3.5 su 5 stelle3.5/5 (39)
- The Boys: A Memoir of Hollywood and FamilyDa EverandThe Boys: A Memoir of Hollywood and FamilyValutazione: 4.5 su 5 stelle4.5/5 (18)
- Photographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyDa EverandPhotographing Women: Posing, Lighting, and Shooting Techniques for Portrait and Fashion PhotographyValutazione: 4.5 su 5 stelle4.5/5 (7)
- Stargazing: Beginner’s guide to astronomyDa EverandStargazing: Beginner’s guide to astronomyValutazione: 5 su 5 stelle5/5 (1)
- From the Basement: A History of Emo Music and How It Changed SocietyDa EverandFrom the Basement: A History of Emo Music and How It Changed SocietyValutazione: 4 su 5 stelle4/5 (14)
- One Flash!: Great Photography with Just One LightDa EverandOne Flash!: Great Photography with Just One LightValutazione: 4 su 5 stelle4/5 (6)
- The Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversDa EverandThe Food Stylist's Handbook: Hundreds of Media Styling Tips, Tricks, and Secrets for Chefs, Artists, Bloggers, and Food LoversValutazione: 4 su 5 stelle4/5 (1)
- Food Styling and Photography For DummiesDa EverandFood Styling and Photography For DummiesValutazione: 4 su 5 stelle4/5 (5)
- Vivian Maier: A Photographer’s Life and AfterlifeDa EverandVivian Maier: A Photographer’s Life and AfterlifeValutazione: 3.5 su 5 stelle3.5/5 (8)
- Fuck Yeah Menswear: Bespoke Knowledge for the Crispy GentlemanDa EverandFuck Yeah Menswear: Bespoke Knowledge for the Crispy GentlemanValutazione: 3 su 5 stelle3/5 (15)
- Filmmaking Essentials for Photographers: The Fundamental Principles of Transitioning from Stills to MotionDa EverandFilmmaking Essentials for Photographers: The Fundamental Principles of Transitioning from Stills to MotionValutazione: 5 su 5 stelle5/5 (1)