Potrebbero piacerti anche
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- FACTS Control Protection Automatic Voltage Control PFC SFC: S S S S SDocumento1 paginaFACTS Control Protection Automatic Voltage Control PFC SFC: S S S S SEvans EjegiNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Application of Games With Incomplete Information For Pricing Electricity in Deregulated Power R.W. Ferrero J. Rivera S.M. ShahidehpourDocumento6 pagineApplication of Games With Incomplete Information For Pricing Electricity in Deregulated Power R.W. Ferrero J. Rivera S.M. ShahidehpourEvans EjegiNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Blackouts in The US/Canada and Continental Europe in 2003: Is Liberalisation To Blame?Documento7 pagineBlackouts in The US/Canada and Continental Europe in 2003: Is Liberalisation To Blame?Evans EjegiNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- ConclusionDocumento1 paginaConclusionEvans EjegiNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Chapter 12Documento23 pagineChapter 12sachin235Nessuna valutazione finora
- MCH3008 Lab ProjectDocumento4 pagineMCH3008 Lab ProjectEJAZ AHMADNessuna valutazione finora
- Learn Cram: Maths Mcqs For Class 12 With Answers Chapter 11 Three Dimensional GeometryDocumento20 pagineLearn Cram: Maths Mcqs For Class 12 With Answers Chapter 11 Three Dimensional GeometrySanjayNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Maths - English Medium 2 To 5Documento8 pagineMaths - English Medium 2 To 5TNGTASELVASOLAINessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Permeability Prediction Using Projection Pursuit Regression in The Abadi FieldDocumento13 paginePermeability Prediction Using Projection Pursuit Regression in The Abadi FieldTeja MulyawanNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Mental Mathematics Marathon Semi-Final 2012 PowerpointDocumento42 pagineMental Mathematics Marathon Semi-Final 2012 Powerpointrishie1Nessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Cherry Rose T. Malgapo: Probability and StatisticsDocumento26 pagineCherry Rose T. Malgapo: Probability and StatisticscherryNessuna valutazione finora
- Ratio and Proportion Questions For IBPS Clerk PDFDocumento15 pagineRatio and Proportion Questions For IBPS Clerk PDFRoshan GuptaNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Formulae: Higher Tier: Section CrossDocumento15 pagineFormulae: Higher Tier: Section CrosshardsinghNessuna valutazione finora
- Lets22 Ultimate Math FinalDocumento30 pagineLets22 Ultimate Math FinalJudie Jane MuegaNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Lesson Study Lesson PlanDocumento8 pagineLesson Study Lesson Planapi-345200895Nessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Allan White PDFDocumento17 pagineAllan White PDFAnonymous RMXuPuNessuna valutazione finora
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Pre Mid Exam Practice of SAW and TOPSIS MethodsDocumento7 paginePre Mid Exam Practice of SAW and TOPSIS Methodsmk1853828Nessuna valutazione finora
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- 4 Measures of Central Tendency, Position, Variability PDFDocumento24 pagine4 Measures of Central Tendency, Position, Variability PDFJenny Estoconing Sardañas Jr.100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Y9 Solving PBLDocumento19 pagineY9 Solving PBLhoneyoopsyaaNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
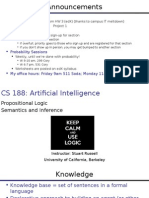
- FA15 CS188 Lecture 08 PL Semantics and Inference - pptx-2Documento25 pagineFA15 CS188 Lecture 08 PL Semantics and Inference - pptx-2ateiskaNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- 05 eLMS Activity 1 - Seatwork Prefinal Arnold C Planas DSPDocumento2 pagine05 eLMS Activity 1 - Seatwork Prefinal Arnold C Planas DSPDummmy AccountttNessuna valutazione finora
- Line & AnglesDocumento33 pagineLine & AnglesAarushNessuna valutazione finora
- The Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremDocumento33 pagineThe Lengths of Proofs: Kreisel's Conjecture and Godel's Speed-Up TheoremstefanodotNessuna valutazione finora
- NetworkDocumento91 pagineNetworkBenjamin LeeNessuna valutazione finora
- Module 4: Short QuestionsDocumento2 pagineModule 4: Short QuestionscaptainhassNessuna valutazione finora
- Math10Q3M2-Activity SheetsDocumento6 pagineMath10Q3M2-Activity SheetsLavinia RamosNessuna valutazione finora
- Autobiography of Sir George Biddell Airy by Airy, George Biddell, 1801-1892Documento275 pagineAutobiography of Sir George Biddell Airy by Airy, George Biddell, 1801-1892Gutenberg.orgNessuna valutazione finora
- IGNOU MCA MCS-21 Solved Assignments 2011Documento17 pagineIGNOU MCA MCS-21 Solved Assignments 2011Syedkareem_hkgNessuna valutazione finora
- Graph Theory (Euler+hamilton)Documento11 pagineGraph Theory (Euler+hamilton)samiul mugdhaNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- TOK ConnectionsDocumento15 pagineTOK ConnectionsLorraine SabbaghNessuna valutazione finora
- ACJC JC 2 H2 Maths 2012 Year End Exam Question Paper 1Documento5 pagineACJC JC 2 H2 Maths 2012 Year End Exam Question Paper 1ofji4oNessuna valutazione finora
- ChapterStat 2Documento77 pagineChapterStat 2Md Aziq Md RaziNessuna valutazione finora
- Department of Mathematics & Statistics St. Xavier'S College, RanchiDocumento6 pagineDepartment of Mathematics & Statistics St. Xavier'S College, RanchiAlok RanjanNessuna valutazione finora
- CSEC June 2009 Mathematics P1Documento12 pagineCSEC June 2009 Mathematics P1get thosebooksNessuna valutazione finora
- Practice For 2ND PTDocumento3 paginePractice For 2ND PTCherry CabatbatNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)