Potrebbero piacerti anche
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideDa EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideValutazione: 4 su 5 stelle4/5 (8)
- ABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDFDocumento238 pagineABB 3HAC050988 AM Arc and Arc Sensor RW 6-En PDForefat1Nessuna valutazione finora
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Advanced Process Control: Beyond Single Loop ControlDa EverandAdvanced Process Control: Beyond Single Loop ControlNessuna valutazione finora
- Pressure Compensated Temperature Control in Distillation ColumnsDocumento4 paginePressure Compensated Temperature Control in Distillation ColumnsMigLoutNessuna valutazione finora
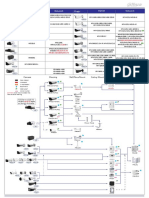
- r32 - Rb26dett Ecu PinoutDocumento1 paginar32 - Rb26dett Ecu PinouttospotNessuna valutazione finora
- PID Controller Techniques for Anti-windup and Bumpless TransfersDocumento10 paginePID Controller Techniques for Anti-windup and Bumpless TransfersErna UtamiNessuna valutazione finora
- PID Controller For Pneumatic Proportional ValveDocumento4 paginePID Controller For Pneumatic Proportional ValveMiko QuijanoNessuna valutazione finora
- Automatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFDocumento11 pagineAutomatic On-Line Estimation of Backlash in Control Loops Tore Hugland PDFGino PascualliNessuna valutazione finora
- Tuning A PID Controller: Guillermo J. CostaDocumento6 pagineTuning A PID Controller: Guillermo J. CostaDeepak RainaNessuna valutazione finora
- PIDTuningClassical - ControlsWikiDocumento14 paginePIDTuningClassical - ControlsWikiksameer_coepNessuna valutazione finora
- 21 THDocumento32 pagine21 THujjwal kumarNessuna valutazione finora
- The Process May Be A Complex Assembly of PhenomenaDocumento9 pagineThe Process May Be A Complex Assembly of PhenomenaNishat AnwarNessuna valutazione finora
- PID ControllerDocumento6 paginePID ControllerpavittarNessuna valutazione finora
- PID ControllersDocumento58 paginePID Controllerss12originalNessuna valutazione finora
- Process ControlDocumento24 pagineProcess ControlEr Shubham RaksheNessuna valutazione finora
- PIDControllerDocumento42 paginePIDControllerstephenNessuna valutazione finora
- 2 - Modelling and Control of Forward-Feed Evaporator For The Production of Glucose SyrupDocumento7 pagine2 - Modelling and Control of Forward-Feed Evaporator For The Production of Glucose SyrupKate MayerNessuna valutazione finora
- W7ADocumento15 pagineW7AShujah RashidNessuna valutazione finora
- L-11 (SS) (Ia&c) ( (Ee) Nptel) PDFDocumento12 pagineL-11 (SS) (Ia&c) ( (Ee) Nptel) PDFMohammad Zakir Hossan ShujonNessuna valutazione finora
- EVMS Full Notes PDFDocumento78 pagineEVMS Full Notes PDFNaveen DhanurajNessuna valutazione finora
- System DynamicsDocumento137 pagineSystem DynamicsFevzi Çakmak BolatNessuna valutazione finora
- Lab Report CompleteDocumento30 pagineLab Report Completefahadfiaz0% (1)
- 1815 13 PDFDocumento24 pagine1815 13 PDFsiamak001Nessuna valutazione finora
- PID ControlDocumento11 paginePID Controlhd03Nessuna valutazione finora
- Control EngineeringDocumento137 pagineControl EngineeringDuc-Duy Pham NguyenNessuna valutazione finora
- Dead-Time Compensation and Model-Based Control: Wade04.book Page 291 Thursday, April 15, 2004 12:20 PMDocumento20 pagineDead-Time Compensation and Model-Based Control: Wade04.book Page 291 Thursday, April 15, 2004 12:20 PMsiamak001Nessuna valutazione finora
- 1451 Part4Documento5 pagine1451 Part4kaicyemNessuna valutazione finora
- Adcontrol ReviewerDocumento28 pagineAdcontrol Reviewerjezreel gamboaNessuna valutazione finora
- Tuning PID Controllers using IMCDocumento4 pagineTuning PID Controllers using IMCvijay_jvNessuna valutazione finora
- PID ControllerDocumento24 paginePID ControllerAliceAlormenuNessuna valutazione finora
- Pid ControllerDocumento8 paginePid Controllernilanjana89Nessuna valutazione finora
- Paper Saturation SMCDocumento34 paginePaper Saturation SMCDaniel AmbrizNessuna valutazione finora
- Feedforward ControlDocumento6 pagineFeedforward ControlÉrick AlexandreNessuna valutazione finora
- Designing PID AlgorithmDocumento7 pagineDesigning PID AlgorithmVu Duc TruongNessuna valutazione finora
- Control SystemDocumento183 pagineControl Systemsantoshgowda8Nessuna valutazione finora
- اخررررر تعديلDocumento10 pagineاخررررر تعديلAhmed nawfalNessuna valutazione finora
- NI Tutorial 3782 enDocumento4 pagineNI Tutorial 3782 enpetergoodingNessuna valutazione finora
- Report ControlDocumento33 pagineReport Controlajwadalfatani100% (5)
- Building Controls IV TranscriptDocumento8 pagineBuilding Controls IV TranscriptirwanNessuna valutazione finora
- Control System NotesDocumento179 pagineControl System NotesChandrashekarNessuna valutazione finora
- Approximately Time-Optimal Fuzzy Control of Two-Tank System: Thomas Heckenthaler and Sebastian EngellDocumento7 pagineApproximately Time-Optimal Fuzzy Control of Two-Tank System: Thomas Heckenthaler and Sebastian EngellVaghela ChintanNessuna valutazione finora
- 1815 08 PDFDocumento4 pagine1815 08 PDFsiamak001Nessuna valutazione finora
- L-14 (SS) (Iac) ( (Ee) Nptel)Documento10 pagineL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNessuna valutazione finora
- Flow Control Lab ReportDocumento15 pagineFlow Control Lab ReportKammy LaiNessuna valutazione finora
- GAS MEASUREMENT FUNDAMENTALSDocumento59 pagineGAS MEASUREMENT FUNDAMENTALSJorge Luis RamosNessuna valutazione finora
- PID tuning methodsDocumento14 paginePID tuning methodsAbolhasanNessuna valutazione finora
- Probably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadDocumento28 pagineProbably The Best Simple PID Tuning Rules in The World: Sigurd SkogestadMohamed RezkNessuna valutazione finora
- Report On Pid ControllerDocumento14 pagineReport On Pid Controllersura samirNessuna valutazione finora
- White Paper PID Control in Vacuum Systems - Final 2020Documento4 pagineWhite Paper PID Control in Vacuum Systems - Final 2020giselleNessuna valutazione finora
- Embedded Systems and Control Systems': An Open-Loop ControllerDocumento5 pagineEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalNessuna valutazione finora
- U Tune (Micro Lite)Documento8 pagineU Tune (Micro Lite)Laurence MalanumNessuna valutazione finora
- 1 System DynamicsDocumento60 pagine1 System DynamicsAous HNessuna valutazione finora
- AIS AnswersDocumento37 pagineAIS AnswersSanatan DharmaNessuna valutazione finora
- PID controller basics for process controlDocumento16 paginePID controller basics for process controlmarraurdersNessuna valutazione finora
- Controller (Notes)Documento22 pagineController (Notes)Alex OsesNessuna valutazione finora
- Laboratory Essay With Online Back-Calculation Anti-Windup Scheme For A MTG SystemDocumento6 pagineLaboratory Essay With Online Back-Calculation Anti-Windup Scheme For A MTG SystemMalek MahmoudNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- Distillation End Point EstimationDocumento8 pagineDistillation End Point EstimationMigLoutNessuna valutazione finora
- Easy Control Valve SelectionDocumento5 pagineEasy Control Valve SelectionhrtoroNessuna valutazione finora
- EthylbenzeneDocumento9 pagineEthylbenzeneDany LopezNessuna valutazione finora
- Beginner's Guide To Differential Pressure LevelDocumento9 pagineBeginner's Guide To Differential Pressure LevelMigLoutNessuna valutazione finora
- Post Weld Heat TreatmentDocumento2 paginePost Weld Heat TreatmentgullenariNessuna valutazione finora
- Post Weld Heat TreatmentDocumento2 paginePost Weld Heat TreatmentgullenariNessuna valutazione finora
- Termites and Microbial Biological Control StrategiesDocumento30 pagineTermites and Microbial Biological Control StrategiesMuhammad QasimNessuna valutazione finora
- JSW Energy Plant Maintenance BBPDocumento46 pagineJSW Energy Plant Maintenance BBPSandeep Kumar PraharajNessuna valutazione finora
- Mahle KFWA MAIN Data SheetDocumento4 pagineMahle KFWA MAIN Data SheetRudnikNessuna valutazione finora
- Director's Report Highlights Record Wheat Production in IndiaDocumento80 pagineDirector's Report Highlights Record Wheat Production in Indiakamlesh tiwariNessuna valutazione finora
- IMRAD - G1 PepperDocumento13 pagineIMRAD - G1 PepperRomero, Ken Angelo B.Nessuna valutazione finora
- 366 Community Service IdeasDocumento5 pagine366 Community Service IdeasAhmetYılmazVuralNessuna valutazione finora
- Cars Ger Eu PCDocumento157 pagineCars Ger Eu PCsergeyNessuna valutazione finora
- Daftar Harga Airway PT. Surgika 2017Documento16 pagineDaftar Harga Airway PT. Surgika 2017Syaofi SofiNessuna valutazione finora
- Ericsson Microwave Outlook 2021Documento16 pagineEricsson Microwave Outlook 2021Ahmed HussainNessuna valutazione finora
- Bajaj Auto Company NewDocumento94 pagineBajaj Auto Company Newbhas_786Nessuna valutazione finora
- Dimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutDocumento11 pagineDimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutRizqi RamadhanNessuna valutazione finora
- Stavanger Tourist SpotDocumento96 pagineStavanger Tourist Spotregupathi6413Nessuna valutazione finora
- BiologyDocumento21 pagineBiologyHrituraj banikNessuna valutazione finora
- 2021 - Tet Purchase Behavior Report - INFOCUSDocumento15 pagine2021 - Tet Purchase Behavior Report - INFOCUSGame AccountNessuna valutazione finora
- Ethics Module 2 - NotesDocumento1 paginaEthics Module 2 - Notesanon_137579236Nessuna valutazione finora
- Dahua Pfa130 e Korisnicko Uputstvo EngleskiDocumento5 pagineDahua Pfa130 e Korisnicko Uputstvo EngleskiSaša CucakNessuna valutazione finora
- Downstream Processing and Bioseparation - Recovery and Purification of Biological Products PDFDocumento313 pagineDownstream Processing and Bioseparation - Recovery and Purification of Biological Products PDFgonbio67% (3)
- MPC-006 DDocumento14 pagineMPC-006 DRIYA SINGHNessuna valutazione finora
- Advanced Composite Materials Design EngineeringDocumento19 pagineAdvanced Composite Materials Design EngineeringpanyamnrNessuna valutazione finora
- DerbyCityCouncil Wizquiz Presentation PDFDocumento123 pagineDerbyCityCouncil Wizquiz Presentation PDFShubham NamdevNessuna valutazione finora
- Mycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Documento10 pagineMycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Abdul MuqsitNessuna valutazione finora
- Electrical Units of MeasureDocumento36 pagineElectrical Units of MeasureHyung BaeNessuna valutazione finora
- CV1000 CV2000 CV3000 Ice Cube Machines SpecsDocumento12 pagineCV1000 CV2000 CV3000 Ice Cube Machines SpecsAriel Godoy100% (1)
- Products and Services For Consumers: True / False QuestionsDocumento65 pagineProducts and Services For Consumers: True / False QuestionsThúy HiềnNessuna valutazione finora
- Tipologie Break in OutDocumento17 pagineTipologie Break in OutGiorgio FantauzziNessuna valutazione finora
- NarendraVani KallubaluVKV 2010-11Documento144 pagineNarendraVani KallubaluVKV 2010-11Vivekananda Kendra100% (1)
- Sensor Controlled Animatronic Hand: Graduation Project PresentationDocumento24 pagineSensor Controlled Animatronic Hand: Graduation Project PresentationAnonymous D2FmKSxuuNessuna valutazione finora
- SSX Diaphragm: Truextent® Replacement Diaphragms For JBL and RADIANDocumento2 pagineSSX Diaphragm: Truextent® Replacement Diaphragms For JBL and RADIANIvica IndjinNessuna valutazione finora