Potrebbero piacerti anche
- Maximizing Plant Performance with Coordinated Boiler and Turbine ControlDocumento28 pagineMaximizing Plant Performance with Coordinated Boiler and Turbine ControlJhoNessuna valutazione finora
- 4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONDocumento14 pagine4 Starting-Characterstics-of-AC-and-DC-Motors (1) PRESENTATIONEloisa FabroaNessuna valutazione finora
- Boiler ParameterDocumento2 pagineBoiler ParameterFieNessuna valutazione finora
- Boiler OverviewDocumento35 pagineBoiler Overviewshashank dasNessuna valutazione finora
- CEA Plant Performance Report 2011-12Documento251 pagineCEA Plant Performance Report 2011-12lovelyshreeNessuna valutazione finora
- HT TransformerDocumento6 pagineHT TransformerMaintenance CircleNessuna valutazione finora
- PGPTPT SyllabusDocumento31 paginePGPTPT Syllabussatish20ntrNessuna valutazione finora
- Centrifugal Compressor Maintenance WorkshopDocumento5 pagineCentrifugal Compressor Maintenance WorkshopNAITIK100% (1)
- Boiler Instrumentation StandardsDocumento33 pagineBoiler Instrumentation StandardsMallinatha PNNessuna valutazione finora
- Boiler Instrumentation and ControlsDocumento23 pagineBoiler Instrumentation and Controlshayat umar bhat100% (4)
- Instrumentation For StudentsDocumento157 pagineInstrumentation For StudentsBalasubramanyaNessuna valutazione finora
- Supercritical Boiler: Higher Efficiency Through Advanced DesignDocumento26 pagineSupercritical Boiler: Higher Efficiency Through Advanced DesignShaheena Khan100% (2)
- FANS: Types, Features, Selection FactorsDocumento15 pagineFANS: Types, Features, Selection FactorsgvprambabuNessuna valutazione finora
- 9-Design of A Solar Updraft Tower Power PlantDocumento9 pagine9-Design of A Solar Updraft Tower Power PlantNadia SoussouNessuna valutazione finora
- Coal pulverizer operation and maintenance proceduresDocumento7 pagineCoal pulverizer operation and maintenance proceduresPoojit PopliNessuna valutazione finora
- C&IDocumento120 pagineC&IDeepak JayNessuna valutazione finora
- 06 Power Plant Frequency ResponseDocumento26 pagine06 Power Plant Frequency ResponseAdel KlkNessuna valutazione finora
- Testing of Turbo GeneratorsDocumento4 pagineTesting of Turbo Generatorsemmanuel akaNessuna valutazione finora
- Boiler Operations and ControlDocumento41 pagineBoiler Operations and Controldurgeshsharma2Nessuna valutazione finora
- Electric Motor Testing: Offline: Jan Michael B. Castaneda College of Engineering University of Rizal SystemDocumento8 pagineElectric Motor Testing: Offline: Jan Michael B. Castaneda College of Engineering University of Rizal SystemJMNessuna valutazione finora
- 2 Pneumatic ActuatorDocumento21 pagine2 Pneumatic ActuatorSamNessuna valutazione finora
- Condenser Graphical AnalysisDocumento24 pagineCondenser Graphical Analysissaisrikanths5168Nessuna valutazione finora
- CH 3 - Induction MotorsDocumento46 pagineCH 3 - Induction MotorsMiz AelyfhaNessuna valutazione finora
- Industrial Training ReportDocumento43 pagineIndustrial Training ReportAnirudh Khare50% (2)
- WRITE UP ON AUTOMATIC TURBINE TESTERDocumento14 pagineWRITE UP ON AUTOMATIC TURBINE TESTERlp mishraNessuna valutazione finora
- Boiler Instrumentation and ControlsDocumento18 pagineBoiler Instrumentation and Controlshayat umar bhat100% (1)
- Water Treatment Training Dakhni Expansion Project P J Sulfur Recovery UnitDocumento15 pagineWater Treatment Training Dakhni Expansion Project P J Sulfur Recovery Unitnasir_engrNessuna valutazione finora
- STG Instrument ListDocumento12 pagineSTG Instrument Listhari reddyNessuna valutazione finora
- Chapt 2 Power RegulationDocumento17 pagineChapt 2 Power RegulationManiraj ShresthaNessuna valutazione finora
- TARIFF DESIGN for GENERATING STATIONSDocumento16 pagineTARIFF DESIGN for GENERATING STATIONSNaveen Chodagiri100% (1)
- Bhel ReportDocumento25 pagineBhel Reportherokaboss1987Nessuna valutazione finora
- Superheated SteamDocumento19 pagineSuperheated SteamSAKDA MAPRADITKUL100% (1)
- Control System PresentationDocumento15 pagineControl System PresentationecegianNessuna valutazione finora
- Mcqs Preparation For Engineering Competitive ExamsDocumento27 pagineMcqs Preparation For Engineering Competitive ExamsNitin MauryaNessuna valutazione finora
- MS 06 21 - Boiler Startup Frim Cold (Rev A - 03.01.12)Documento12 pagineMS 06 21 - Boiler Startup Frim Cold (Rev A - 03.01.12)Prakash WarrierNessuna valutazione finora
- Boiler Mounting and AccessoriesDocumento20 pagineBoiler Mounting and AccessoriesAshok Joshi92% (12)
- HJDocumento4 pagineHJShajil VazhakkalilNessuna valutazione finora
- U6OHREPORT2008Documento89 pagineU6OHREPORT2008Anonymous pKsr5vNessuna valutazione finora
- Emerging Solar Cell TechDocumento16 pagineEmerging Solar Cell TechArchana Diwakar RanjishNessuna valutazione finora
- Basics of Thermal Power PlantDocumento119 pagineBasics of Thermal Power Plantsiva7448163Nessuna valutazione finora
- Maintenance of TrafoDocumento4 pagineMaintenance of TrafoNauval Bangbang Dwi PutraNessuna valutazione finora
- Automatic Generation ControlDocumento56 pagineAutomatic Generation Controlleocar_128100% (3)
- Fire Safety Measures For Schools 2Documento33 pagineFire Safety Measures For Schools 2kavitaNessuna valutazione finora
- Elecon Scoop Coupling Installation Maintenance ManualDocumento21 pagineElecon Scoop Coupling Installation Maintenance ManualVignesh VenkatasubramanianNessuna valutazione finora
- Water Pump STN StandardDocumento5 pagineWater Pump STN StandardTeguh SetionoNessuna valutazione finora
- Sagar Pandey AtpDocumento44 pagineSagar Pandey AtpIshankNessuna valutazione finora
- Presented by - Sandeep Agrawal (Am-Mech) Siddhartha Raizada (Am-Elec)Documento24 paginePresented by - Sandeep Agrawal (Am-Mech) Siddhartha Raizada (Am-Elec)sidraiz26Nessuna valutazione finora
- Generator CoolingDocumento7 pagineGenerator CoolingPrudhvi RajNessuna valutazione finora
- Gas Turbine Power Plant Operation - I&CDocumento14 pagineGas Turbine Power Plant Operation - I&CWidodo Hadi Prabowo100% (1)
- Control and Relay PanelDocumento4 pagineControl and Relay PanelShiv Kumar VermaNessuna valutazione finora
- OPMS Trip Report AnalysisDocumento4 pagineOPMS Trip Report AnalysisAnuragNessuna valutazione finora
- 2 X 115 TPH CFBC Boiler: Ultratech Cement Limited - Apcw TadipatriDocumento51 pagine2 X 115 TPH CFBC Boiler: Ultratech Cement Limited - Apcw TadipatriChanna BasavaNessuna valutazione finora
- Control SystemsDocumento263 pagineControl SystemsrejishkpkdNessuna valutazione finora
- Boiler Tuning BasicsDocumento14 pagineBoiler Tuning Basicsveeru290683_20976731Nessuna valutazione finora
- Table 1. Options For Plant Boiler Control. Source: Tim LeopoldDocumento11 pagineTable 1. Options For Plant Boiler Control. Source: Tim LeopoldRam KrishnaNessuna valutazione finora
- Turb Follow BLR BLR Follow Turb ModeDocumento2 pagineTurb Follow BLR BLR Follow Turb ModeĐặng Trung Anh100% (2)
- Steam Turbine Governing System Is A Method, Used ToDocumento19 pagineSteam Turbine Governing System Is A Method, Used ToDeevanshu Gupta100% (1)
- CMC NTPC UnchaharDocumento8 pagineCMC NTPC UnchaharDino100% (1)
- Steam Turbine Control Valve, Governing and Lube Oil System ExplainedDocumento15 pagineSteam Turbine Control Valve, Governing and Lube Oil System ExplainedPrabhu Lohakare100% (1)
- CMC - 01 08 2012 FinalDocumento44 pagineCMC - 01 08 2012 FinalJai Gupta67% (3)
- ModificationsDocumento2 pagineModificationsAnudeep ChittluriNessuna valutazione finora
- Boiler ExplosionDocumento6 pagineBoiler ExplosionAnudeep ChittluriNessuna valutazione finora
- 33 National Convention On Quality ConceptsDocumento10 pagine33 National Convention On Quality ConceptsAnudeep ChittluriNessuna valutazione finora
- Automatic Valveless Gravity FilterDocumento8 pagineAutomatic Valveless Gravity FilterAnudeep ChittluriNessuna valutazione finora
- TG Lube Oil Flushing ProcedureDocumento16 pagineTG Lube Oil Flushing ProcedureAnudeep ChittluriNessuna valutazione finora
- Demineralisation of WaterDocumento140 pagineDemineralisation of WaterAshwani Dogra67% (6)
- Art Culture Till SatavahanasDocumento64 pagineArt Culture Till SatavahanasAnudeep ChittluriNessuna valutazione finora
- Ammonia Hydroxide SafetyDocumento12 pagineAmmonia Hydroxide SafetyAnudeep ChittluriNessuna valutazione finora
- Art Culture KushanasDocumento38 pagineArt Culture KushanasAnudeep ChittluriNessuna valutazione finora
- Understand IMS Challenges and BenefitsDocumento27 pagineUnderstand IMS Challenges and BenefitsAnudeep ChittluriNessuna valutazione finora
- Instrument Air Dew PointDocumento7 pagineInstrument Air Dew PointAnudeep ChittluriNessuna valutazione finora
- Energy Management SystemDocumento33 pagineEnergy Management SystemAnudeep Chittluri100% (2)
- Andhrula Sanghika Charitra by SuravaramDocumento430 pagineAndhrula Sanghika Charitra by Suravarambalu100% (2)
- Instrument Air Dew PointDocumento7 pagineInstrument Air Dew PointAnudeep ChittluriNessuna valutazione finora
- NTPC Jhanor Cii 31082017Documento79 pagineNTPC Jhanor Cii 31082017Anudeep ChittluriNessuna valutazione finora
- NW On EO MB From 24 25 Jan 2018 at Chennai RD ChennaiDocumento1 paginaNW On EO MB From 24 25 Jan 2018 at Chennai RD ChennaiAnudeep ChittluriNessuna valutazione finora
- Boiler Q ADocumento26 pagineBoiler Q AGnanaSekar100% (1)
- 2x150mw Jindal Power PlantDocumento152 pagine2x150mw Jindal Power PlantAnudeep ChittluriNessuna valutazione finora
- Final Paper 1 Reg Set A20.04.2017 PDFDocumento15 pagineFinal Paper 1 Reg Set A20.04.2017 PDFAnudeep ChittluriNessuna valutazione finora
- Pre-NEET Obstetrics and Gynaecology (Sakshi Arora)Documento321 paginePre-NEET Obstetrics and Gynaecology (Sakshi Arora)sipra jagu100% (4)
- Turbine Efficiency and Heat Rate AnalysisDocumento64 pagineTurbine Efficiency and Heat Rate AnalysisAnudeep Chittluri100% (2)
- Key Performance Indicators CCSDocumento11 pagineKey Performance Indicators CCSAnudeep ChittluriNessuna valutazione finora
- Operations Research P Rama Murthy PDFDocumento716 pagineOperations Research P Rama Murthy PDFPaban Raj LohaniNessuna valutazione finora
- NotificationDocumento12 pagineNotificationAnudeep ChittluriNessuna valutazione finora
- EDTA CHEMICAL CLEANING (BLR) PDFDocumento16 pagineEDTA CHEMICAL CLEANING (BLR) PDFAnudeep Chittluri100% (2)
- FMEADocumento8 pagineFMEAAnudeep ChittluriNessuna valutazione finora
- Nsic Detailed Guidelines Including AnnexureDocumento11 pagineNsic Detailed Guidelines Including AnnexureAnudeep ChittluriNessuna valutazione finora
- Differences Between ISO 9001 - 2015 and ISO 9001 - 2008Documento16 pagineDifferences Between ISO 9001 - 2015 and ISO 9001 - 2008Anudeep ChittluriNessuna valutazione finora
- RCFLTDDocumento1 paginaRCFLTDAnudeep ChittluriNessuna valutazione finora
- Time ManagementDocumento23 pagineTime ManagementAnudeep ChittluriNessuna valutazione finora
- TD-ST-MAST-100-004-EN V2.00 MAST-A MAST-V MAST-H Installation Manual-EN PDFDocumento20 pagineTD-ST-MAST-100-004-EN V2.00 MAST-A MAST-V MAST-H Installation Manual-EN PDFBam BA100% (1)
- Power Plant and Calculations: Danfoss High Pressure PumpsDocumento6 paginePower Plant and Calculations: Danfoss High Pressure PumpsLakshmi NarayanNessuna valutazione finora
- Pressure Parts Furnace Do's and Dont's GuideDocumento4 paginePressure Parts Furnace Do's and Dont's GuideArun GuptaNessuna valutazione finora
- PHE Brochure LRDocumento12 paginePHE Brochure LRDhaivat ShahNessuna valutazione finora
- PRSDocumento6 paginePRSavikbandyopadhyayNessuna valutazione finora
- Cockhran Boiler in DetailedDocumento4 pagineCockhran Boiler in DetailedROHITNessuna valutazione finora
- ASME Sec VIII the most common code for oil & gas pressure vesselsDocumento14 pagineASME Sec VIII the most common code for oil & gas pressure vesselsShieeplNessuna valutazione finora
- Mcba 1482D-V3Documento28 pagineMcba 1482D-V3viorel danilaNessuna valutazione finora
- Service Manual 'B' SC Vac 16 L. AL2Documento71 pagineService Manual 'B' SC Vac 16 L. AL2Anwar Dheen67% (3)
- Valero Blinding Guideline Provides Safety ProceduresDocumento13 pagineValero Blinding Guideline Provides Safety ProcedureskishorsinghNessuna valutazione finora
- Boiler CombustionDocumento20 pagineBoiler CombustionAnand SwamiNessuna valutazione finora
- Boiler and Aux Maintenance ManualDocumento248 pagineBoiler and Aux Maintenance Manualkeerthi dayarathnaNessuna valutazione finora
- Boiler Water ConditioningDocumento59 pagineBoiler Water ConditioningShikderNessuna valutazione finora
- Asme BPVC III D 1 NF 2015Documento226 pagineAsme BPVC III D 1 NF 2015Tino OrtizNessuna valutazione finora
- 02 - Condensers & Cooling Towers PDFDocumento61 pagine02 - Condensers & Cooling Towers PDFVimleshKumarSharmaNessuna valutazione finora
- Main Steam Turbine Controls Retrofit ISA FinalDocumento13 pagineMain Steam Turbine Controls Retrofit ISA Finalvankayalasurya100% (1)
- Efisiensi Boiler Metode Tak LangsungDocumento64 pagineEfisiensi Boiler Metode Tak LangsungDicki PangestuNessuna valutazione finora
- Cep 202107 Optimize-ReboilerDocumento11 pagineCep 202107 Optimize-Reboilerammar fahmiNessuna valutazione finora
- Interview Questions InstrumentDocumento53 pagineInterview Questions InstrumentQamar Hassan IqbalNessuna valutazione finora
- Basic Terms For Mechanical EngineeringDocumento9 pagineBasic Terms For Mechanical EngineeringnaveenNessuna valutazione finora
- Spm1500 ManualDocumento20 pagineSpm1500 ManualJude ParasNessuna valutazione finora
- Plant Lifecycle ManagementDocumento16 paginePlant Lifecycle ManagementmhdsolehNessuna valutazione finora
- Report On EGBDocumento3 pagineReport On EGBshakilNessuna valutazione finora
- J500.05 Flat Glass Gages April 2014 PDFDocumento20 pagineJ500.05 Flat Glass Gages April 2014 PDFahmedhassankhanNessuna valutazione finora
- Import Policy Order 2013 PakistanDocumento132 pagineImport Policy Order 2013 PakistanSher Zaman BhuttoNessuna valutazione finora
- BPCL Interview QuestionsDocumento3 pagineBPCL Interview QuestionsUjjawal PratapNessuna valutazione finora
- Sugar Industry Technologists Meeting 2000 Paper Optimizes Water UsageDocumento12 pagineSugar Industry Technologists Meeting 2000 Paper Optimizes Water Usageroy@daesNessuna valutazione finora
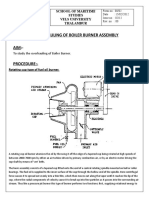
- Overhauling of Boiler Burner AssemblyDocumento4 pagineOverhauling of Boiler Burner AssemblyAayush AgrawalNessuna valutazione finora
- General Information 500MW BoilerDocumento4 pagineGeneral Information 500MW BoilerSaurabh BarangeNessuna valutazione finora
- Equipment Design - BOILERSDocumento24 pagineEquipment Design - BOILERSEmyu ClaridadNessuna valutazione finora