Potrebbero piacerti anche
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsDa EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNessuna valutazione finora
- Schaum's Outline of Electronic Devices and Circuits, Second EditionDa EverandSchaum's Outline of Electronic Devices and Circuits, Second EditionValutazione: 5 su 5 stelle5/5 (6)
- Master of Science IN Embedded Systems: Resistance Measurement Using Avr Atmega8 MicrocontrollerDocumento19 pagineMaster of Science IN Embedded Systems: Resistance Measurement Using Avr Atmega8 MicrocontrollerDanutzBreazuNessuna valutazione finora
- 1 Feasibility StudyDocumento9 pagine1 Feasibility Studysd7175239Nessuna valutazione finora
- EEP-Arc Flash Hazard Calculation in 9 Steps Using IEEE 1584-AAADocumento6 pagineEEP-Arc Flash Hazard Calculation in 9 Steps Using IEEE 1584-AAAJOSE LUIS FALCON CHAVEZNessuna valutazione finora
- Lca Lab 1Documento22 pagineLca Lab 1The Youtube TrainNessuna valutazione finora
- Circuit Simulation File CompleteDocumento32 pagineCircuit Simulation File Completeshivamsinghunique1Nessuna valutazione finora
- Arc Flash Hazard Calculation in 9 Steps Using IEEE 1584Documento5 pagineArc Flash Hazard Calculation in 9 Steps Using IEEE 1584Harry RincónNessuna valutazione finora
- Printed Circuit Board Simulation A Look at Next Generation Simulation Tools and Their Correlation To Laboratory MeasurementsDocumento28 paginePrinted Circuit Board Simulation A Look at Next Generation Simulation Tools and Their Correlation To Laboratory MeasurementsCbl ChabulNessuna valutazione finora
- Time and Current Grading For Protection Relay Type MK1000 & MK2000 - Mohamad Naim Mohamad - TK2821.M63 2008Documento27 pagineTime and Current Grading For Protection Relay Type MK1000 & MK2000 - Mohamad Naim Mohamad - TK2821.M63 2008wcchang8100% (1)
- Linear Circuit Analysis Lab Manual BeeeDocumento60 pagineLinear Circuit Analysis Lab Manual BeeeAbdulQuddusNessuna valutazione finora
- Transistor Modeling Guide: Parameter Selection and Circuit SimulationDocumento116 pagineTransistor Modeling Guide: Parameter Selection and Circuit Simulationeko7291Nessuna valutazione finora
- VlsiDocumento13 pagineVlsiRajaganapathi RajappanNessuna valutazione finora
- Introduction To Behavioral ModelingDocumento5 pagineIntroduction To Behavioral ModelingRakotomalala Mamy TianaNessuna valutazione finora
- ABB REL670 V1.B A32 Template Manual ENU TU3.00 V1.000 PDFDocumento17 pagineABB REL670 V1.B A32 Template Manual ENU TU3.00 V1.000 PDFWafa Imene BouhaddaNessuna valutazione finora
- Arc Flash Calculation Example1 PDFDocumento25 pagineArc Flash Calculation Example1 PDFcpuerto33Nessuna valutazione finora
- SDT LabmanualDocumento15 pagineSDT LabmanualstenalyNessuna valutazione finora
- Battery Level IndicatorDocumento17 pagineBattery Level IndicatorMratunjay ChouhanNessuna valutazione finora
- Template Manual Abb Ret 670 v1.1 Enu Tu2.22 v1.000Documento18 pagineTemplate Manual Abb Ret 670 v1.1 Enu Tu2.22 v1.000m_dh87129100% (1)
- Siemens 7SA6x V4.6 Template Manual ENU TU2.22 V1.200Documento22 pagineSiemens 7SA6x V4.6 Template Manual ENU TU2.22 V1.200துரைராஜ் இலட்சுமணன்Nessuna valutazione finora
- Avr+lcd ReportDocumento95 pagineAvr+lcd ReportyrikkiNessuna valutazione finora
- Analog Design Assignment: Analog and Digital VLSI Design - EEE C443 February 1, 2012Documento9 pagineAnalog Design Assignment: Analog and Digital VLSI Design - EEE C443 February 1, 2012srishaharidasNessuna valutazione finora
- Low Power VLSI Unit 3Documento8 pagineLow Power VLSI Unit 3Vamsi Krishna KuppalaNessuna valutazione finora
- Electronic Circuit Simulation - Wikipedia, The Free EncyclopediaDocumento4 pagineElectronic Circuit Simulation - Wikipedia, The Free EncyclopediaetherhuntNessuna valutazione finora
- PLC Synchrocloser EPECDocumento8 paginePLC Synchrocloser EPECDaniel FloresNessuna valutazione finora
- PowerInverterJSL2009 SmallerDocumento13 paginePowerInverterJSL2009 SmallerNobin MathewNessuna valutazione finora
- PowerSupply DesignSoftwareDocumento2 paginePowerSupply DesignSoftwareRagnar RagnarsonNessuna valutazione finora
- Design and Implementation of Traffic Controller Using VHDL: Interim Project ReportDocumento21 pagineDesign and Implementation of Traffic Controller Using VHDL: Interim Project ReportAugusto Germano da SilvaNessuna valutazione finora
- 1-Lab#01 Introduction To Basic Power Electronics EquipmentDocumento8 pagine1-Lab#01 Introduction To Basic Power Electronics EquipmentRizwan Ahmad Muhammad AslamNessuna valutazione finora
- A Matlab / Simulink Based Tool For Power Electronic CircuitsDocumento6 pagineA Matlab / Simulink Based Tool For Power Electronic CircuitstatacpsNessuna valutazione finora
- Device Load Monitor With Programmable Meter For Energy AuditDocumento5 pagineDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapNessuna valutazione finora
- Stepper Motor ReportDocumento13 pagineStepper Motor ReportVolda0% (2)
- 1MRK505346-BEN B en Product Guide Line Differential Protection RED670 2.1Documento138 pagine1MRK505346-BEN B en Product Guide Line Differential Protection RED670 2.1Mạc DavidNessuna valutazione finora
- Spectre Transient Simulations: 2.1 ReadingDocumento5 pagineSpectre Transient Simulations: 2.1 ReadingAnonymous CNAdojNessuna valutazione finora
- Tabla de Informacion Sobre Motores ElectricosDocumento8 pagineTabla de Informacion Sobre Motores ElectricosAgustin BrianeseNessuna valutazione finora
- Password Based Circuit BreakerDocumento7 paginePassword Based Circuit BreakerAnuj TripathiNessuna valutazione finora
- Study of Relay Protection Modeling and SimulationDocumento5 pagineStudy of Relay Protection Modeling and SimulationИван ИвановNessuna valutazione finora
- Automotive Electrical DisturbancesDocumento40 pagineAutomotive Electrical DisturbancesNirmala Ranawat100% (1)
- Low Voltage Switchgear and Control Gear Application GuideDocumento152 pagineLow Voltage Switchgear and Control Gear Application GuideAntonio MejiaNessuna valutazione finora
- Behavioral Modeling of Switched-Capacitor Sigma-Delta ModulatorsDocumento13 pagineBehavioral Modeling of Switched-Capacitor Sigma-Delta ModulatorsRamakrishnaVakulabharanamNessuna valutazione finora
- Universidad Tecnólogica de Panamá: 1. Commissioning Practical Aspects of Relays With IECDocumento20 pagineUniversidad Tecnólogica de Panamá: 1. Commissioning Practical Aspects of Relays With IECIsaac JustinNessuna valutazione finora
- Digital Testing of HV Circuit BreakerDocumento21 pagineDigital Testing of HV Circuit Breakervamshi4all100% (10)
- Digital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkDocumento55 pagineDigital Distance Relay Modeling and Testing Using LabVIEW and MATLAB SimulinkK Vijay Bhaskar ReddyNessuna valutazione finora
- Lab Session 1Documento3 pagineLab Session 1MUHAMMAD ZUBAIRNessuna valutazione finora
- Implement SPWM with Arduino HILDocumento10 pagineImplement SPWM with Arduino HILAbdullah Al MamunNessuna valutazione finora
- Arc FlashDocumento14 pagineArc FlashpavlovicgNessuna valutazione finora
- Lab 1 (Introduction To Test and Measurement Equipment)Documento9 pagineLab 1 (Introduction To Test and Measurement Equipment)afaq ahmad khanNessuna valutazione finora
- Arc Flash Calculations and Detailed Arc Flash Warning LabelsDocumento25 pagineArc Flash Calculations and Detailed Arc Flash Warning LabelsMoon3pellNessuna valutazione finora
- Siemens 7SD610 V4.7 Template Manual ENU TU3.10 V1.121Documento20 pagineSiemens 7SD610 V4.7 Template Manual ENU TU3.10 V1.121RaúlEmirGutiérrezLópezNessuna valutazione finora
- An 7510Documento15 pagineAn 7510MANOEL SAMPAIONessuna valutazione finora
- Experiment 2: Power System Analysis Using Cape SoftwareDocumento3 pagineExperiment 2: Power System Analysis Using Cape SoftwareShaiful Ashwat ShukorNessuna valutazione finora
- Allen 1981Documento8 pagineAllen 1981aji.isramboNessuna valutazione finora
- SN74LVC125A Quadruple Bus Buffer Gate With 3-State Outputs: 1 Features 3 DescriptionDocumento28 pagineSN74LVC125A Quadruple Bus Buffer Gate With 3-State Outputs: 1 Features 3 DescriptionSvv KarthikNessuna valutazione finora
- Mid Term Project Report ProtectionDocumento25 pagineMid Term Project Report ProtectionNationalinstituteDsnrNessuna valutazione finora
- Ica Lab NewDocumento105 pagineIca Lab Newveeru57Nessuna valutazione finora
- Modeling and Testing of A Digital Distance Relay MDocumento8 pagineModeling and Testing of A Digital Distance Relay MMohamed Daw HamoudaNessuna valutazione finora
- Protection Coordination of Hub Power Plant On EtapDocumento24 pagineProtection Coordination of Hub Power Plant On Etapmuhammad zubair100% (1)
- ELECTRONIC CIRCUITS AND LOGIC DESIGN LAB INTRO TO SPICE AND CIRCUIT SIMULATION USING MULTISIMDocumento16 pagineELECTRONIC CIRCUITS AND LOGIC DESIGN LAB INTRO TO SPICE AND CIRCUIT SIMULATION USING MULTISIMYogesh GowdaNessuna valutazione finora
- Project Title: A Presentation OnDocumento23 pagineProject Title: A Presentation OnAnonymous qh5UUGTNessuna valutazione finora
- Analog Electronics: Circuits, Systems and Signal ProcessingDa EverandAnalog Electronics: Circuits, Systems and Signal ProcessingNessuna valutazione finora
- 2602 - Basics of Multiplexers 2 - SlidesDocumento10 pagine2602 - Basics of Multiplexers 2 - Slidesthangaraj_icNessuna valutazione finora
- IDDQ Failure Diagnosis Is Here: Ron PressDocumento2 pagineIDDQ Failure Diagnosis Is Here: Ron Pressthangaraj_icNessuna valutazione finora
- Layout Design GuideDocumento41 pagineLayout Design Guidethangaraj_icNessuna valutazione finora
- Day3 FLEXDocumento49 pagineDay3 FLEXthangaraj_ic100% (1)
- 75 How To Stop Worrying and Start Living PDFDocumento6 pagine75 How To Stop Worrying and Start Living PDFFelimon Megerssa100% (2)
- App 119Documento19 pagineApp 119thangaraj_icNessuna valutazione finora
- Atmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042Documento21 pagineAtmel 2521 AVR Hardware Design Considerations ApplicationNote AVR042thangaraj_icNessuna valutazione finora
- ) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsDocumento32 pagine) $$1 - ADE %ASY: #-/3) $$1 4EST - ETHODOLOGY &undamental #OnceptsSainadh YerrapragadaNessuna valutazione finora
- Thirumanthirambook 1Documento39 pagineThirumanthirambook 1jeyankarunanithiNessuna valutazione finora
- An 345Documento4 pagineAn 345thangaraj_icNessuna valutazione finora
- e2e.ti.comDocumento3 paginee2e.ti.comthangaraj_icNessuna valutazione finora
- Analog Layout and Grounding TechniquesDocumento7 pagineAnalog Layout and Grounding TechniquesSijo XaviarNessuna valutazione finora
- WWW Planetanalog Com DifferentialSignaling 1Documento5 pagineWWW Planetanalog Com DifferentialSignaling 1thangaraj_icNessuna valutazione finora
- App 114Documento17 pagineApp 114thangaraj_icNessuna valutazione finora
- Bhaja Govindam Tamil LyricsDocumento6 pagineBhaja Govindam Tamil Lyricsthangaraj_icNessuna valutazione finora
- WWW Planetanalog Com CurrentsenseDocumento6 pagineWWW Planetanalog Com Currentsensethangaraj_icNessuna valutazione finora
- Getting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2Documento7 pagineGetting The Best Out of Your Precision Design With Zero Drift Amplifiers Part 2thangaraj_icNessuna valutazione finora
- Adc DNL INLDocumento5 pagineAdc DNL INLNabil IshamNessuna valutazione finora
- P 1779Documento4 pagineP 1779thangaraj_icNessuna valutazione finora
- Embeddedgurus ComDocumento5 pagineEmbeddedgurus Comthangaraj_icNessuna valutazione finora
- 12b.iep Activity1 2013Documento28 pagine12b.iep Activity1 2013demos2011Nessuna valutazione finora
- EMC and NoiseDocumento47 pagineEMC and Noisethangaraj_icNessuna valutazione finora
- Hybrid PCB Stack Up GuideDocumento13 pagineHybrid PCB Stack Up Guidethangaraj_icNessuna valutazione finora
- AppendixDocumento23 pagineAppendixthangaraj_icNessuna valutazione finora
- Understanding DC Instrumentation AmplifiersDocumento4 pagineUnderstanding DC Instrumentation Amplifiersthangaraj_icNessuna valutazione finora
- Agarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005Documento136 pagineAgarwal A., Lang J. - Foundations of Analog and Digital Electronic Circuits - Supplemental Sections and Examples - 2005შაქრო ტრუბეცკოიNessuna valutazione finora
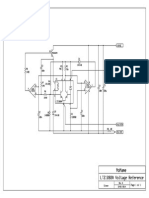
- LTZ Ref BoardDocumento1 paginaLTZ Ref Boardthangaraj_icNessuna valutazione finora
- PCBStackups (Ott)Documento18 paginePCBStackups (Ott)krishnamohankola321Nessuna valutazione finora
- Instrumentation AmplifierDocumento6 pagineInstrumentation Amplifierilg1Nessuna valutazione finora
- Subsection 4 4 1Documento6 pagineSubsection 4 4 1thangaraj_icNessuna valutazione finora
- Over View On 5 S TechnicDocumento14 pagineOver View On 5 S TechnicSachleen Singh BajwaNessuna valutazione finora
- Hublit Limphaire Leaflet India PDFDocumento2 pagineHublit Limphaire Leaflet India PDFAkshay RaiNessuna valutazione finora
- Prepositions-Of-place Worksheet Azucena SalasDocumento3 paginePrepositions-Of-place Worksheet Azucena SalasAndreia SimõesNessuna valutazione finora
- Abstract Classes and Methods in Object Oriented ProgrammingDocumento13 pagineAbstract Classes and Methods in Object Oriented Programmingkishore1201Nessuna valutazione finora
- Performance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurDocumento8 paginePerformance Estimation of Ofdm-Wimax Network: Vishal Sharma & Navneet KaurTJPRC PublicationsNessuna valutazione finora
- RCE Unpacking Ebook (Translated by LithiumLi) - UnprotectedDocumento2.342 pagineRCE Unpacking Ebook (Translated by LithiumLi) - Unprotecteddryten7507Nessuna valutazione finora
- 1 Project ManagementDocumento14 pagine1 Project Managementyaswanth119Nessuna valutazione finora
- SI Units in Geotechnical EngineeringDocumento7 pagineSI Units in Geotechnical EngineeringfaroeldrNessuna valutazione finora
- Load-Modulated Arrays Emerging MIMO TechnologyDocumento83 pagineLoad-Modulated Arrays Emerging MIMO TechnologysmkraliNessuna valutazione finora
- HTML Project RestaurantDocumento8 pagineHTML Project RestaurantSandeep Chowdary0% (1)
- YEZ-Conical Brake MotorDocumento3 pagineYEZ-Conical Brake MotorMech MallNessuna valutazione finora
- Sample Lab ReportDocumento4 pagineSample Lab ReportHolley WrightNessuna valutazione finora
- Masterseal 550Documento4 pagineMasterseal 550Arjun MulluNessuna valutazione finora
- Allcargo Corporate BrochureDocumento12 pagineAllcargo Corporate BrochureallinonecargologisticsNessuna valutazione finora
- GPT 1-15 LineBackerDocumento4 pagineGPT 1-15 LineBackerazadeazNessuna valutazione finora
- CISO Core Proficiency Prepared by Chintan GurjarDocumento1 paginaCISO Core Proficiency Prepared by Chintan GurjarDerpNessuna valutazione finora
- Kosice Schulze Bramey PDFDocumento13 pagineKosice Schulze Bramey PDFandrel_fariasNessuna valutazione finora
- Eaton Tb09500001e PDFDocumento62 pagineEaton Tb09500001e PDFJuan E Torres MNessuna valutazione finora
- E12817 GT AC5300 Manual EnglishDocumento152 pagineE12817 GT AC5300 Manual Englishlegato1984Nessuna valutazione finora
- Programmability in SPSS 16 & 17, Jon PeckDocumento36 pagineProgrammability in SPSS 16 & 17, Jon PeckJasmin MaricNessuna valutazione finora
- Auto Temp II Heat Pump: Programmable Thermostat For Single and Multistage Heat Pump SystemsDocumento22 pagineAuto Temp II Heat Pump: Programmable Thermostat For Single and Multistage Heat Pump Systemswideband76Nessuna valutazione finora
- Siemens 1LE1 PDFDocumento308 pagineSiemens 1LE1 PDFharold100% (1)
- Ficha Tecnica 750 GPMDocumento156 pagineFicha Tecnica 750 GPMByron Chele0% (2)
- Hughes Brothers PDFDocumento52 pagineHughes Brothers PDFJavier MaldonadoNessuna valutazione finora
- Inspection and Maintenance of Drillpipe Ebook PDFDocumento39 pagineInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraNessuna valutazione finora
- Trace MasterDocumento29 pagineTrace Masterapi-3858801Nessuna valutazione finora
- IG 55 CalculationDocumento11 pagineIG 55 CalculationNoridhamNessuna valutazione finora
- Value-Instruments Cat2012 enDocumento58 pagineValue-Instruments Cat2012 enAnonymous C6Vaod9Nessuna valutazione finora
- Pagination script tutorial for PHP MySQL programmersDocumento4 paginePagination script tutorial for PHP MySQL programmersThomas ChinyamaNessuna valutazione finora