Potrebbero piacerti anche
- 98 e Aci 136Documento7 pagine98 e Aci 136Mohamad AlimadadiNessuna valutazione finora
- Use of Gps To Synchronize T H E At&T National Telecommunications NetworkDocumento12 pagineUse of Gps To Synchronize T H E At&T National Telecommunications Networkrdd_rddNessuna valutazione finora
- Remote Sensing Satellite Data Demodulation and Bit Synchronization-2Documento12 pagineRemote Sensing Satellite Data Demodulation and Bit Synchronization-2IAEME PublicationNessuna valutazione finora
- Satrack Full Report New2Documento17 pagineSatrack Full Report New2ammayi9845_930467904Nessuna valutazione finora
- Fruits Satrack DocumentationDocumento22 pagineFruits Satrack Documentationmar 931996Nessuna valutazione finora
- An Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IIDocumento11 pagineAn Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IILucas MarinhoNessuna valutazione finora
- La Transmisión de Múltiples Estándares Inalámbricos en Una Red de Radio-Sobre-La FibraDocumento4 pagineLa Transmisión de Múltiples Estándares Inalámbricos en Una Red de Radio-Sobre-La FibraJohnJairoArangoQuinteroNessuna valutazione finora
- Wireless Local Positioning Concepts, Solutions, ApplicationsDocumento6 pagineWireless Local Positioning Concepts, Solutions, ApplicationsCathy XueNessuna valutazione finora
- Coherent Detection Method Using DSP For Demodulation of Signal and Subsequent Equalization of Propagation ImpairmentsDocumento3 pagineCoherent Detection Method Using DSP For Demodulation of Signal and Subsequent Equalization of Propagation ImpairmentsMd Ibrahim Khalil SalmanNessuna valutazione finora
- Protection of Transmission Lines Using GPS: by G.S.Ramya Krishna B080614EEDocumento36 pagineProtection of Transmission Lines Using GPS: by G.S.Ramya Krishna B080614EERamya Gajjarapu100% (2)
- Protectoin of Transmission Lines Using GPS: Submitted By: Monalisha Dash Branch: Electrical Regd No: 0701208143Documento21 pagineProtectoin of Transmission Lines Using GPS: Submitted By: Monalisha Dash Branch: Electrical Regd No: 0701208143Monalisha Dash100% (1)
- A Brief Review: Compressed Sensing of ECG Signal For Wireless SystemDocumento6 pagineA Brief Review: Compressed Sensing of ECG Signal For Wireless SystemAzmiNessuna valutazione finora
- Protection of Transmission Lines Using GpsDocumento22 pagineProtection of Transmission Lines Using Gpsabhinandan puhanNessuna valutazione finora
- Data Fusion TechniqueDocumento8 pagineData Fusion TechniquepuppyrNessuna valutazione finora
- Detection and Location of Gps Interference Sources Using Digital Receiver ElectronicsDocumento6 pagineDetection and Location of Gps Interference Sources Using Digital Receiver ElectronicsArjun AslekarNessuna valutazione finora
- APPLICATION OF GPS IN Power SystemDocumento35 pagineAPPLICATION OF GPS IN Power SystemRavinder KumarNessuna valutazione finora
- Cogeu D4.2 (Ict 248560)Documento73 pagineCogeu D4.2 (Ict 248560)Trivedi UrviNessuna valutazione finora
- NMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyDocumento8 pagineNMEA-0183 Sentences Analysis Tool From The GPS System To Increase The Positional AccuracyJournal of TelecommunicationsNessuna valutazione finora
- PILA: Sub-Meter Localization Using CSI From Commodity Wi-Fi DevicesDocumento20 paginePILA: Sub-Meter Localization Using CSI From Commodity Wi-Fi DevicesDiegoNessuna valutazione finora
- Making EIRP Measurements On 5G Base StationsDocumento13 pagineMaking EIRP Measurements On 5G Base Stationsjohn BronsonNessuna valutazione finora
- Snake Specs 2005 Rev3Documento11 pagineSnake Specs 2005 Rev3Thaibinh NguyenNessuna valutazione finora
- Design and Realization of Automatic Packet Reporting System (APRS) For Sending Telemetry Data in Nano Satellite Communication SystemDocumento7 pagineDesign and Realization of Automatic Packet Reporting System (APRS) For Sending Telemetry Data in Nano Satellite Communication Systemaisyah social mediaNessuna valutazione finora
- Lab JamDocumento10 pagineLab JamIthel LtheiNessuna valutazione finora
- A Real-Time Conductor Sag Measurement System Using A Differential GPSDocumento6 pagineA Real-Time Conductor Sag Measurement System Using A Differential GPSBalaji Narayanan NNessuna valutazione finora
- TMPDDFB TMPDocumento8 pagineTMPDDFB TMPFrontiersNessuna valutazione finora
- SodaPDF-converted-Protection of Transmission 1Documento21 pagineSodaPDF-converted-Protection of Transmission 1Narayana NarayanaNessuna valutazione finora
- Conducting GPS Field Surveys PDFDocumento10 pagineConducting GPS Field Surveys PDFupsarki7547Nessuna valutazione finora
- POSMV - 2005 - 09 - Motion Sensor ComparisonDocumento18 paginePOSMV - 2005 - 09 - Motion Sensor Comparisonchakib tabNessuna valutazione finora
- Chapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1Documento18 pagineChapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1ravifireblade8402Nessuna valutazione finora
- SATRACKDocumento22 pagineSATRACKapi-19937584100% (6)
- PER and EVM Measurements of A Radio-Over-Fiber Network For Cellular and WLAN System ApplicationsDocumento7 paginePER and EVM Measurements of A Radio-Over-Fiber Network For Cellular and WLAN System ApplicationsSourav DebNessuna valutazione finora
- SatrackDocumento16 pagineSatrackKarteek SaiNessuna valutazione finora
- Binary Pulse Position Modulation Simulation System in Free Space Optical Communication SystemsDocumento4 pagineBinary Pulse Position Modulation Simulation System in Free Space Optical Communication SystemsLương Xuân DẫnNessuna valutazione finora
- VTC2015 ZanDocumento6 pagineVTC2015 ZanGregory LevantNessuna valutazione finora
- 04 - Yellojosula, Wide Area Protection and ControlDocumento33 pagine04 - Yellojosula, Wide Area Protection and ControlHectorNessuna valutazione finora
- Protectionoftransmissionlinesusing GPSDocumento19 pagineProtectionoftransmissionlinesusing GPSChaithra BRNessuna valutazione finora
- 2007jan - GPS Receiver CalibrationDocumento8 pagine2007jan - GPS Receiver Calibrationnileshdesai857Nessuna valutazione finora
- Sensors 11 03466 v2Documento17 pagineSensors 11 03466 v2David BennettNessuna valutazione finora
- Protection of TransmissionDocumento18 pagineProtection of TransmissionAbhisekh AnandNessuna valutazione finora
- Calibration Techniques For Improved MIMO and Beamsteering CharacterizationDocumento12 pagineCalibration Techniques For Improved MIMO and Beamsteering CharacterizationAntonio GeorgeNessuna valutazione finora
- Research of Weak GPS Signal Acquisition Algorithm: Shijun Tian Yiming PiDocumento4 pagineResearch of Weak GPS Signal Acquisition Algorithm: Shijun Tian Yiming Pitahir.saleemNessuna valutazione finora
- GPS Data and Correction ServicesDocumento3 pagineGPS Data and Correction ServicesEvelyn Angarita GarciaNessuna valutazione finora
- Railways Communication System: A Report OnDocumento16 pagineRailways Communication System: A Report Onpurvakhanna915851Nessuna valutazione finora
- A Wireless Sensor Network For Precision Agriculture and Its PerformanceDocumento17 pagineA Wireless Sensor Network For Precision Agriculture and Its PerformanceAxl Umbra EGNessuna valutazione finora
- S02-1 Alves de Albuquerque Time-Effective GPS Time Domain Signal Acquisition AlgorithmDocumento6 pagineS02-1 Alves de Albuquerque Time-Effective GPS Time Domain Signal Acquisition AlgorithmdfaxaNessuna valutazione finora
- Using Handheld GPS Receivers For Precise Positioning: Volker SCHWIEGER, GermanyDocumento16 pagineUsing Handheld GPS Receivers For Precise Positioning: Volker SCHWIEGER, GermanyandysupaNessuna valutazione finora
- Research and Development of 40Gbps Optical Free Space Communication From Satellite/AirplaneDocumento6 pagineResearch and Development of 40Gbps Optical Free Space Communication From Satellite/AirplaneRini KamilNessuna valutazione finora
- An Experimental Study On Digital Predistortion For Radio-over-Fiber LinksDocumento6 pagineAn Experimental Study On Digital Predistortion For Radio-over-Fiber LinksshahabniaziNessuna valutazione finora
- Clock Recovery TechniquesDocumento26 pagineClock Recovery Techniques40 XII-B Satyam SinhaNessuna valutazione finora
- Using Spectrum AnalyzerDocumento24 pagineUsing Spectrum AnalyzerSurinder SinghNessuna valutazione finora
- Detection of Fault On Transmission Line Using GPS: BY: S.Nagendra Kumar. S.Krishnarjuna RaoDocumento17 pagineDetection of Fault On Transmission Line Using GPS: BY: S.Nagendra Kumar. S.Krishnarjuna RaoNagendra KumarNessuna valutazione finora
- Crosby 7B3Documento7 pagineCrosby 7B3Евгений ПереверзевNessuna valutazione finora
- Report On PmuDocumento15 pagineReport On PmuMohan Sainath AvvaruNessuna valutazione finora
- WP Ieee 1588 v2 Telecom Profile v1Documento9 pagineWP Ieee 1588 v2 Telecom Profile v1Gregory LevantNessuna valutazione finora
- SatrackDocumento34 pagineSatrackshallinidivya100% (1)
- Signal Integrity: From High-Speed to Radiofrequency ApplicationsDa EverandSignal Integrity: From High-Speed to Radiofrequency ApplicationsNessuna valutazione finora
- Implementing IP and Ethernet on the 4G Mobile NetworkDa EverandImplementing IP and Ethernet on the 4G Mobile NetworkValutazione: 5 su 5 stelle5/5 (1)
- Mobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationDa EverandMobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationValutazione: 3.5 su 5 stelle3.5/5 (3)
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationDa EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNessuna valutazione finora
- Busbar ProtectionDocumento90 pagineBusbar Protectionkedsoi2100% (1)
- Distribution Reliability PredictiveDocumento25 pagineDistribution Reliability PredictivemohsinamanNessuna valutazione finora
- Potential Applications Expert Systems To Power System ProtectionDocumento9 paginePotential Applications Expert Systems To Power System ProtectionmohsinamanNessuna valutazione finora
- Ground Fault Protection For Bus-Connected Generators in An Interconnected 13.8-KV SystemDocumento9 pagineGround Fault Protection For Bus-Connected Generators in An Interconnected 13.8-KV SystemmohsinamanNessuna valutazione finora
- Quantifying The Potential Impacts of Disturbances On Power System ProtectionDocumento4 pagineQuantifying The Potential Impacts of Disturbances On Power System ProtectionmohsinamanNessuna valutazione finora
- Application of Voltage RegulatorsDocumento11 pagineApplication of Voltage RegulatorsmohsinamanNessuna valutazione finora
- Rated Currents of Three Phase MotorsDocumento1 paginaRated Currents of Three Phase MotorsmohsinamanNessuna valutazione finora
- Solar EnergyDocumento2 pagineSolar EnergymohsinamanNessuna valutazione finora
- Distribution System Static VAr Compensators Field ExperienceDocumento13 pagineDistribution System Static VAr Compensators Field ExperiencemohsinamanNessuna valutazione finora
- Power Systems Electromagnetic Transients Simulation (Malestrom) PDFDocumento449 paginePower Systems Electromagnetic Transients Simulation (Malestrom) PDFmohsinaman100% (1)
- Vlpgo Electrical Power System RestorationDocumento54 pagineVlpgo Electrical Power System Restorationmohsinaman100% (1)
- Cooper Power Systems - Recloser Guide PDFDocumento16 pagineCooper Power Systems - Recloser Guide PDFAerwin BautistaNessuna valutazione finora
- 4407 ADocumento5 pagine4407 AMarincus AdrianNessuna valutazione finora
- ReportDocumento55 pagineReportArpitSemwalNessuna valutazione finora
- Sleep DetectorDocumento28 pagineSleep DetectorVishwas NgNessuna valutazione finora
- Service Manual (Common) Service Manual (Common) : History Information For The Following ManualDocumento246 pagineService Manual (Common) Service Manual (Common) : History Information For The Following ManualEgosumlux001Nessuna valutazione finora
- DPI 530 User ManualDocumento45 pagineDPI 530 User ManualtrpsivaNessuna valutazione finora
- RF Microwave and Millimeter Wave IC Selection Guide 2017Documento56 pagineRF Microwave and Millimeter Wave IC Selection Guide 2017nboninaNessuna valutazione finora
- 08 Ta BWGF 000a B6eDocumento3 pagine08 Ta BWGF 000a B6eAmador AguilaNessuna valutazione finora
- WojaduxexasodDocumento2 pagineWojaduxexasodNovri AndiNessuna valutazione finora
- General Information: Standards IEC 60529, EN 60529Documento1 paginaGeneral Information: Standards IEC 60529, EN 60529hirenk1979Nessuna valutazione finora
- Alums - GSM RF - Student GuideDocumento262 pagineAlums - GSM RF - Student Guidecpatel49Nessuna valutazione finora
- Unit 4: 1. Write Short Notes On Travelling Wave Antenna? AnsDocumento14 pagineUnit 4: 1. Write Short Notes On Travelling Wave Antenna? AnsPoornima ChinthalaNessuna valutazione finora
- Chapter 1-Semiconductor Basics-2-3Documento40 pagineChapter 1-Semiconductor Basics-2-3Syed Zubair ZahidNessuna valutazione finora
- PMMCDocumento66 paginePMMCEvoque YTNessuna valutazione finora
- 01 Vacon AC Drives Basic CourseDocumento43 pagine01 Vacon AC Drives Basic CourseKarthik Sriramakavacham100% (2)
- Frequency Response of Thin Film Chip ResistorsDocumento4 pagineFrequency Response of Thin Film Chip Resistorsaarumugam_rajendranNessuna valutazione finora
- GE Solar Modeling-V1-1 PDFDocumento36 pagineGE Solar Modeling-V1-1 PDFRosyNessuna valutazione finora
- Sircover Series - Manual CHANGEOVER Switches: General CharacteristicsDocumento2 pagineSircover Series - Manual CHANGEOVER Switches: General CharacteristicsThilinaNessuna valutazione finora
- Transformer Voltage RegulationDocumento21 pagineTransformer Voltage RegulationAbdelilahaliNessuna valutazione finora
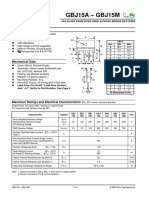
- GBJ15M Diode Cau Chinh Luu PDFDocumento4 pagineGBJ15M Diode Cau Chinh Luu PDFHưng HQNessuna valutazione finora
- AppendixB2 AtoC PDFDocumento110 pagineAppendixB2 AtoC PDFsatyendra kumarNessuna valutazione finora
- Subject: AEE Code: AU410705: UNIT-1 Automobile Electrical Systems and Electronics SystemDocumento2 pagineSubject: AEE Code: AU410705: UNIT-1 Automobile Electrical Systems and Electronics SystemAniket PatilNessuna valutazione finora
- PHMSA 2017 0158 0001 - Attachment - 37Documento300 paginePHMSA 2017 0158 0001 - Attachment - 37Pammy JainNessuna valutazione finora
- GSM Site Survey RulesDocumento41 pagineGSM Site Survey Rulestanujsatle60% (5)
- Principles Of: Electr IcityDocumento19 paginePrinciples Of: Electr IcityMarion Lacre MacalaladNessuna valutazione finora
- Theoretical Modeling of Tm-Doped Silica Fiber LasersDocumento9 pagineTheoretical Modeling of Tm-Doped Silica Fiber Lasersteektak1Nessuna valutazione finora
- Project - Paeansonic CF210SP CD9088+CD7642 AM - FM Radio Kit - Gough's Tech ZoneDocumento17 pagineProject - Paeansonic CF210SP CD9088+CD7642 AM - FM Radio Kit - Gough's Tech Zonehidrologia05Nessuna valutazione finora
- Datasheet PDFDocumento6 pagineDatasheet PDFMarialeMedinaNessuna valutazione finora
- EMC-Mon GB 04.04.2005Documento62 pagineEMC-Mon GB 04.04.2005mbarete293% (30)
- A-Isometer® Irdh275: Ground Fault Monitor / Ground Fault Relay For Ungrounded AC, DC, and AC/DC SystemsDocumento80 pagineA-Isometer® Irdh275: Ground Fault Monitor / Ground Fault Relay For Ungrounded AC, DC, and AC/DC SystemsMauricio AguilarNessuna valutazione finora