Potrebbero piacerti anche
- Chromophobia - David Batchelor ESPAÑOLDocumento128 pagineChromophobia - David Batchelor ESPAÑOLfelipe Briceo100% (2)
- Direcciones y Planos CristalográficosDocumento21 pagineDirecciones y Planos CristalográficosYesid Cardona63% (8)
- Análisis de Anomalías en Variadores de FrecuenciaDocumento32 pagineAnálisis de Anomalías en Variadores de Frecuenciajg_941Nessuna valutazione finora
- Laboratorio 6 FluidosDocumento7 pagineLaboratorio 6 FluidosSnaider Yari SNessuna valutazione finora
- Metrología Del MotorDocumento4 pagineMetrología Del MotorJUAN JOSE PRADA PUENTESNessuna valutazione finora
- Células FotovoltáicasDocumento8 pagineCélulas FotovoltáicasrodrigovabNessuna valutazione finora
- Bomba CentrifugaDocumento12 pagineBomba CentrifugaVeronica MorenoNessuna valutazione finora
- GastonDocumento9 pagineGastonLópez SantiagoNessuna valutazione finora
- 3.1 - 3.3 ActuadoresDocumento40 pagine3.1 - 3.3 ActuadoresSG Manuel JuanNessuna valutazione finora
- Diagrama de Bloques Unidad Electronica de MandoDocumento2 pagineDiagrama de Bloques Unidad Electronica de MandoJhonnyTapia100% (2)
- INSTALACIONESDocumento19 pagineINSTALACIONESBrayan BraunNessuna valutazione finora
- Portafolio de Evidencias (Mantenimoento A Equipos Inustriales)Documento19 paginePortafolio de Evidencias (Mantenimoento A Equipos Inustriales)Jorge LuisNessuna valutazione finora
- Sensores y Actuadores Tema 1 PDFDocumento9 pagineSensores y Actuadores Tema 1 PDFGtoyotar ChoqueNessuna valutazione finora
- TransmisoresDocumento15 pagineTransmisoresAlan Estrada SalazarNessuna valutazione finora
- Medidores de NivelDocumento10 pagineMedidores de NivelJose Eduardo Guevara GonzalesNessuna valutazione finora
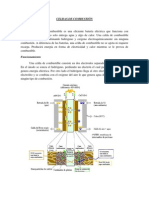
- Celdas de CombustiónDocumento6 pagineCeldas de CombustiónLis18Nessuna valutazione finora
- Introduccion A Compresores de AireDocumento19 pagineIntroduccion A Compresores de AireVidalNessuna valutazione finora
- Clasificación de Los ActuadoresDocumento2 pagineClasificación de Los ActuadoresLemuel TrujilloNessuna valutazione finora
- Capitulo 4 - Maquinas SincrónicasDocumento38 pagineCapitulo 4 - Maquinas Sincrónicassantiago arroyoNessuna valutazione finora
- Cargador de Bateria ConceptoDocumento25 pagineCargador de Bateria ConceptoLuis Enrique Halsey GutierrezNessuna valutazione finora
- CONVERTIDOR de AC AC PresentacionDocumento5 pagineCONVERTIDOR de AC AC PresentacionAlvaro RicaldiNessuna valutazione finora
- Diseño de Refrigerador SolarDocumento58 pagineDiseño de Refrigerador SolarWiller Wladimir PozoNessuna valutazione finora
- Tipos de Bombas de AguaDocumento15 pagineTipos de Bombas de Aguarodrigoxtrem100% (1)
- Condensadores Termicos PresentacionDocumento22 pagineCondensadores Termicos Presentacioncine12Nessuna valutazione finora
- 3.1, 3.2, 3.3 Selección de LubricantesDocumento27 pagine3.1, 3.2, 3.3 Selección de LubricantesbrandonNessuna valutazione finora
- Sensores OpticosDocumento7 pagineSensores OpticosJesús Q. CastañedaNessuna valutazione finora
- Variador de FrecuenciaDocumento232 pagineVariador de FrecuenciaTomás Barrientos Saihua100% (1)
- Bancos de CondensadoresDocumento3 pagineBancos de CondensadoresNiltonGonzalesNessuna valutazione finora
- Mapa MentalDocumento16 pagineMapa MentalAlejandro hernadez de la rosa100% (1)
- Horno IndustrialDocumento7 pagineHorno IndustrialAbel FernandezNessuna valutazione finora
- User Guide ETS-1000L (Spanish) 1058624Documento45 pagineUser Guide ETS-1000L (Spanish) 1058624Gilberto Rivera50% (2)
- Actuadores Hidraulicos EditadoDocumento3 pagineActuadores Hidraulicos EditadoNoéNessuna valutazione finora
- Emprendedorismo Plan de Negocio Cosechadora de PapasDocumento74 pagineEmprendedorismo Plan de Negocio Cosechadora de PapasAlejandro MennucciNessuna valutazione finora
- Maquinas y MecanismosDocumento21 pagineMaquinas y MecanismosAbel Jayo AnccoNessuna valutazione finora
- Caldera 2016 InformeDocumento13 pagineCaldera 2016 InformechristianNessuna valutazione finora
- Sensores InductivosDocumento53 pagineSensores InductivosHamilton AnguetaNessuna valutazione finora
- Investigación Sobre Los Diferentes Tipos de VálvulasDocumento29 pagineInvestigación Sobre Los Diferentes Tipos de VálvulasZurisadai Gallegos100% (1)
- Sistema de Agua de Alimenatción de Caldera PDFDocumento49 pagineSistema de Agua de Alimenatción de Caldera PDFMiguel HSNessuna valutazione finora
- Torres de Enfriamiento PDFDocumento16 pagineTorres de Enfriamiento PDFAlan Mathews67% (6)
- Arranque de Motores Estrella TrianguloDocumento3 pagineArranque de Motores Estrella TrianguloshenseyNessuna valutazione finora
- Control On OFFDocumento3 pagineControl On OFFClau RoblesNessuna valutazione finora
- PWM (Pulse Width Modulation)Documento9 paginePWM (Pulse Width Modulation)Yosef GalavizNessuna valutazione finora
- Conceptos Basicos de Instrumentacion y ControlDocumento5 pagineConceptos Basicos de Instrumentacion y ControlCarlos Javier Franco MendozaNessuna valutazione finora
- Sistemas de Generacion de EnergiaDocumento42 pagineSistemas de Generacion de EnergiaChristian Jaime Sanchez100% (4)
- Controlar La Velocidad de Desplazamiento de Un Servo Motor Con Arduino y Un Potenciómetro - CreatinuevaDocumento4 pagineControlar La Velocidad de Desplazamiento de Un Servo Motor Con Arduino y Un Potenciómetro - CreatinuevaGonzalo BazoaltoNessuna valutazione finora
- Inventario de Ciclo de VidaDocumento68 pagineInventario de Ciclo de VidaFernanda RodriguezNessuna valutazione finora
- Manual de Motores Trifasicos de CADocumento32 pagineManual de Motores Trifasicos de CAcalamandro saezNessuna valutazione finora
- Tipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaDocumento5 pagineTipos de Inyeccion - Inyeccion Diesel e Iyeccion GasolinaFernando ToscanoNessuna valutazione finora
- Instrumentación VirtualDocumento3 pagineInstrumentación VirtualGustavo DíazNessuna valutazione finora
- Por Qué Un Motor CA Necesita Un Capacitor para ArrancarDocumento3 paginePor Qué Un Motor CA Necesita Un Capacitor para ArrancarSandrita L JaramilloNessuna valutazione finora
- PWM 555Documento5 paginePWM 555HuGo R. MejoraDoNessuna valutazione finora
- Bomba CentrífugaDocumento25 pagineBomba Centrífugarosario huamánNessuna valutazione finora
- Control de PWMDocumento6 pagineControl de PWMGeova GomezNessuna valutazione finora
- ACTUADORESDocumento4 pagineACTUADORESANDRES BARREIRONessuna valutazione finora
- Aplicación de Los Actuadores en La Instrumentación de ProcesosDocumento12 pagineAplicación de Los Actuadores en La Instrumentación de ProcesosLeo LázaroNessuna valutazione finora
- U-2-Actuadores'Alan - Ivan - Morales'Documento13 pagineU-2-Actuadores'Alan - Ivan - Morales'Trabajos EscolaresNessuna valutazione finora
- ActuadoresDocumento30 pagineActuadoresmanuel_avalos_21Nessuna valutazione finora
- Que Son Los Accionamientos ElectricosDocumento10 pagineQue Son Los Accionamientos ElectricosjailenNessuna valutazione finora
- Sesion11 Actuadores ControladoresDocumento11 pagineSesion11 Actuadores ControladoresFabian AlejandroNessuna valutazione finora
- ACTUADORESDocumento29 pagineACTUADORESAntonio CastroNessuna valutazione finora
- Morfología de Los Robots IndustrialesDocumento21 pagineMorfología de Los Robots IndustrialesKevin CastilloNessuna valutazione finora
- Informe de Analisis Marvin JimenezDocumento5 pagineInforme de Analisis Marvin JimenezAilyn UlloaNessuna valutazione finora
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Da EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Nessuna valutazione finora
- Problema 01Documento3 pagineProblema 01Caito Vilca QuispeNessuna valutazione finora
- P1107-El-Esp-015 Esp Montaje Del Sistema ElectricoDocumento9 pagineP1107-El-Esp-015 Esp Montaje Del Sistema Electricosy4tNessuna valutazione finora
- Problemas Propuestos Voltajes Inducidos y DeducidosDocumento5 pagineProblemas Propuestos Voltajes Inducidos y Deducidosheberson reyes calderonNessuna valutazione finora
- Densidad de Sólidos y LíquidosDocumento5 pagineDensidad de Sólidos y LíquidosJuan Pablo Barahona CastroNessuna valutazione finora
- APznzabUqHqz7aW7RL7a4fCn5alzauAgamKquU_M19nesJXr4w_YruZXdBv_zELwPFHiISPb001WyURJhEJcaQf_RtyQgCbZm2ZY5r80Yl...vmM9Y9WAAniUmwJzmGdWI3XLgkDktKzKfr6zr6szdSW66WhaP_ii9dt8iCZ0RMA2cfNe4z6OOelA4zlgRVnM0Uw7U0lVjozfEd1d098XBejxNflpXkRlEk_A==Documento3 pagineAPznzabUqHqz7aW7RL7a4fCn5alzauAgamKquU_M19nesJXr4w_YruZXdBv_zELwPFHiISPb001WyURJhEJcaQf_RtyQgCbZm2ZY5r80Yl...vmM9Y9WAAniUmwJzmGdWI3XLgkDktKzKfr6zr6szdSW66WhaP_ii9dt8iCZ0RMA2cfNe4z6OOelA4zlgRVnM0Uw7U0lVjozfEd1d098XBejxNflpXkRlEk_A==Orlando LozanoNessuna valutazione finora
- Grupo 3 Informe Dureza BrinellDocumento6 pagineGrupo 3 Informe Dureza BrinellALEXIS OMAR GRIJALVA NACEVILLANessuna valutazione finora
- Características Del MagnetismoDocumento8 pagineCaracterísticas Del MagnetismoSorusama22Nessuna valutazione finora
- Perforacion Bajo Balance (Fluido Aireado), en El Campo PerchelesDocumento58 paginePerforacion Bajo Balance (Fluido Aireado), en El Campo PerchelesFabian Andres Cerezo Garamendi100% (2)
- Informe de Laboratorio PH VinagreDocumento15 pagineInforme de Laboratorio PH VinagreEdith HMNessuna valutazione finora
- Ficha Tecnica Bunker C PDFDocumento3 pagineFicha Tecnica Bunker C PDFel doctol0% (3)
- La Resonancia MecánicaDocumento12 pagineLa Resonancia MecánicaSamuelDavidToctoCabanillas100% (1)
- Ecuaciones ParamétricasDocumento6 pagineEcuaciones ParamétricasPiclonNessuna valutazione finora
- Maquinaria AfiladorasDocumento8 pagineMaquinaria AfiladorasAlvaro A. Gomez CastroNessuna valutazione finora
- Extraccion Zinc y CupritaDocumento5 pagineExtraccion Zinc y Cupritacoreano63Nessuna valutazione finora
- El Cuento de Hadas Termina Con Un Nudo Gordiano y Mas..... Lisa ReneeDocumento45 pagineEl Cuento de Hadas Termina Con Un Nudo Gordiano y Mas..... Lisa ReneemanuelNessuna valutazione finora
- Separatas 13 de MayoDocumento5 pagineSeparatas 13 de MayoANGEL CORDOVANessuna valutazione finora
- M12S3AI4Documento4 pagineM12S3AI4destiny2 isabellaNessuna valutazione finora
- Manual de Actividades Santa Fe y Las InundacionesDocumento44 pagineManual de Actividades Santa Fe y Las InundacionesSilvina Fabiana Sanchez100% (1)
- Observaciones Concluisiones Del Lab6 TransforDocumento2 pagineObservaciones Concluisiones Del Lab6 TransforjosegonzalovelasquezNessuna valutazione finora
- Nociones Básicas de ProbabilidadDocumento9 pagineNociones Básicas de ProbabilidadKarla Hernández100% (1)
- A1 MedelDocumento8 pagineA1 MedelagustinaNessuna valutazione finora
- Manual UnisucreDocumento66 pagineManual UnisucreJOHANDRA MENDEZNessuna valutazione finora
- Scan SpañolDocumento1.183 pagineScan SpañolManuel La Torre100% (4)
- Conceptos Básicos de Instrumentación IndustrialDocumento10 pagineConceptos Básicos de Instrumentación IndustrialRoberthGutierrezNessuna valutazione finora
- Pc4 2013-2 ZegarraDocumento10 paginePc4 2013-2 ZegarraEntretuymilmares AragonNessuna valutazione finora
- Extracción Con Solventes PolaresDocumento3 pagineExtracción Con Solventes PolaresMarcos Rivera CastroNessuna valutazione finora
- Probabilidad 1Documento48 pagineProbabilidad 1alejandra cruzNessuna valutazione finora