Potrebbero piacerti anche
- Project On Graph TheoryDocumento64 pagineProject On Graph Theoryशीत निहाल तोपनो78% (18)
- Tim Roughgarden - Algorithms Illuminated (Part 2) - Graph Algorithms and Data Structures (2018, Soundlikeyourself Publishing, LLC) PDFDocumento221 pagineTim Roughgarden - Algorithms Illuminated (Part 2) - Graph Algorithms and Data Structures (2018, Soundlikeyourself Publishing, LLC) PDFrizvan_ethan_hunt100% (2)
- Lab12 Data Struct ProgrammingDocumento13 pagineLab12 Data Struct Programmingepy90Nessuna valutazione finora
- Graphs AssignmentDocumento5 pagineGraphs AssignmentShravan thoutiNessuna valutazione finora
- Filter 7Documento480 pagineFilter 7Pranjal TripathiNessuna valutazione finora
- NPTEL Design and Analysis of AlgorithmDocumento24 pagineNPTEL Design and Analysis of Algorithmiraj shaikh50% (4)
- Source Code Example For "A Practical Introduction To Data Structures and // Algorithm Analysis" by Clifford A. Shaffer, Prentice Hall, 1998Documento14 pagineSource Code Example For "A Practical Introduction To Data Structures and // Algorithm Analysis" by Clifford A. Shaffer, Prentice Hall, 1998Riska ApriliyantiNessuna valutazione finora
- Graph Theory AlgorithmDocumento44 pagineGraph Theory AlgorithmnitishgalaxyNessuna valutazione finora
- Ds Class 2026 Unit-4 PPT InternalDocumento79 pagineDs Class 2026 Unit-4 PPT Internaljahseh oNessuna valutazione finora
- Vertex Cover ProblemDocumento4 pagineVertex Cover ProblemB.K.MishraNessuna valutazione finora
- Lecture12 GraphsDocumento51 pagineLecture12 GraphsBeth BauzonNessuna valutazione finora
- DSA Module 42Documento124 pagineDSA Module 42anagha annNessuna valutazione finora
- DSA Unit-5Documento230 pagineDSA Unit-5PAREEKSHITH PARUCHURI (RA2111028010039)Nessuna valutazione finora
- Module 5 DSDocumento75 pagineModule 5 DSiliyaz pashaNessuna valutazione finora
- 9.0 Graphs Full SetDocumento63 pagine9.0 Graphs Full SetFaiz RamliNessuna valutazione finora
- Full Added and SubtractorDocumento10 pagineFull Added and Subtractorrishav.cse122066Nessuna valutazione finora
- DSA Lab-9: - Arjav Kanadia IEC2020101Documento17 pagineDSA Lab-9: - Arjav Kanadia IEC2020101Arjav KanadiaNessuna valutazione finora
- Review:: Graphs and Some Graph AlgorithmsDocumento11 pagineReview:: Graphs and Some Graph AlgorithmsshraddhasinghaiNessuna valutazione finora
- DS Module-5 NotesDocumento30 pagineDS Module-5 Notesanikaitsarkar.20ecNessuna valutazione finora
- DSA Unit-5Documento227 pagineDSA Unit-5cht.aishikNessuna valutazione finora
- Terminology For Undirected Graphs:: The Handshaking TheoremDocumento7 pagineTerminology For Undirected Graphs:: The Handshaking TheoremSaba TanveerNessuna valutazione finora
- CSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissDocumento34 pagineCSCE 3110 Data Structures & Algorithm Analysis: Rada Mihalcea Graphs (I) Reading: Chap.9, WeissSreekesh RavindranNessuna valutazione finora
- 11 Graph Data Structure 23052023 090026amDocumento21 pagine11 Graph Data Structure 23052023 090026amBisma GhaffarNessuna valutazione finora
- Graph AlgorithmsDocumento20 pagineGraph Algorithmsapi-3844034100% (3)
- 10 GraphsDocumento69 pagine10 Graphssanskar khandelwalNessuna valutazione finora
- Ds 3Documento8 pagineDs 3GR RNessuna valutazione finora
- Raphs: - Definitions - The Graph ADT - Data Structures For GraphsDocumento27 pagineRaphs: - Definitions - The Graph ADT - Data Structures For GraphsGowtham KrishnaNessuna valutazione finora
- Week 11 - GraphsDocumento11 pagineWeek 11 - GraphsEmmanuel GuillermoNessuna valutazione finora
- 2 - Representation of GrpahsDocumento11 pagine2 - Representation of GrpahsAbhay KhandelwalNessuna valutazione finora
- ppt3 Network TheoryDocumento66 pagineppt3 Network TheorySindiya Therese SNessuna valutazione finora
- Mahedi Final ProjectDocumento15 pagineMahedi Final ProjectMahedi HassanNessuna valutazione finora
- Review 4: CSCI 2720: Data StructuresDocumento33 pagineReview 4: CSCI 2720: Data StructuresJohn WayneNessuna valutazione finora
- Data Struct Assgn19Documento25 pagineData Struct Assgn19Namish DevarajNessuna valutazione finora
- Sns Lab 4Documento12 pagineSns Lab 4Zarafsha AbbasNessuna valutazione finora
- C5 Network (Part 1)Documento10 pagineC5 Network (Part 1)USHA DEVI A/P LINGAPPAN MoeNessuna valutazione finora
- Math 4t: Network in Graph TheoryDocumento20 pagineMath 4t: Network in Graph TheoryyusmarizalNessuna valutazione finora
- Graph MappingDocumento7 pagineGraph MappingZohaib HassanNessuna valutazione finora
- 1987 - A Versatile Graph Structure For Edge-Oriented Graph Algorithms (Ebert1987AVD)Documento7 pagine1987 - A Versatile Graph Structure For Edge-Oriented Graph Algorithms (Ebert1987AVD)culyunNessuna valutazione finora
- Construction Algorithm For Zero Divisor Graphs of Comm RingDocumento9 pagineConstruction Algorithm For Zero Divisor Graphs of Comm RingBBBBBNessuna valutazione finora
- DSA Lab Report 12docxDocumento7 pagineDSA Lab Report 12docxayubNessuna valutazione finora
- Notes Graph Theory 050319Documento74 pagineNotes Graph Theory 050319NurFatihah Nadirah Noor AzlanNessuna valutazione finora
- Chapter 5 - GraphsDocumento14 pagineChapter 5 - Graphstrevorsum123Nessuna valutazione finora
- Construction Algorithm For Zero Divisor Graphs of Finite Commutative Rings and Their Vertex-Based Eccentric Topological IndicesDocumento9 pagineConstruction Algorithm For Zero Divisor Graphs of Finite Commutative Rings and Their Vertex-Based Eccentric Topological IndicesRaulNessuna valutazione finora
- Aoa LabDocumento7 pagineAoa LabAmanNessuna valutazione finora
- Lecture 1Documento50 pagineLecture 1Kashif KashifNessuna valutazione finora
- Unit 13 Directed Graphs: StructureDocumento19 pagineUnit 13 Directed Graphs: StructureJohn ArthurNessuna valutazione finora
- Write A Program To Implement Kruskal's AlgorithmDocumento7 pagineWrite A Program To Implement Kruskal's AlgorithmSayanMaitiNessuna valutazione finora
- Graphs: Chapter 6 Lec 1Documento31 pagineGraphs: Chapter 6 Lec 1Nuhamin BirhanuNessuna valutazione finora
- Graphs: Chapter 6 Lec 1Documento31 pagineGraphs: Chapter 6 Lec 1Nuhamin BirhanuNessuna valutazione finora
- UNIT 5 Graph TheoryDocumento19 pagineUNIT 5 Graph TheoryRutvik SakhavalaNessuna valutazione finora
- Kartelj Results 2019Documento15 pagineKartelj Results 2019bojan_ognjenNessuna valutazione finora
- Graphs: CS 308 - Data StructuresDocumento38 pagineGraphs: CS 308 - Data StructuresAmit RajNessuna valutazione finora
- Graphs in Data Structure Using C ProgrammingDocumento79 pagineGraphs in Data Structure Using C ProgrammingKaran RoyNessuna valutazione finora
- Design and Analysis of Algorithms Lab Manual: Computer Science & Engineering Department NMAMIT, NitteDocumento33 pagineDesign and Analysis of Algorithms Lab Manual: Computer Science & Engineering Department NMAMIT, NitteDivya Renita DsouzaNessuna valutazione finora
- Unit 12 Representations of Graphs: StructureDocumento15 pagineUnit 12 Representations of Graphs: StructureJohn ArthurNessuna valutazione finora
- Assignment 5Documento64 pagineAssignment 5Sheetal AnandNessuna valutazione finora
- Assignment 04Documento4 pagineAssignment 04Arsalan JahNessuna valutazione finora
- Lecture 14 - DMDocumento6 pagineLecture 14 - DMMerei MuratovNessuna valutazione finora
- Let Us Switch To A New Topic:: GraphsDocumento51 pagineLet Us Switch To A New Topic:: GraphsErikVillegasLlagasNessuna valutazione finora
- Unit 4 Graph Theory: Prepared By: Ramesh RimalDocumento129 pagineUnit 4 Graph Theory: Prepared By: Ramesh RimalramnathNessuna valutazione finora
- Design & Analysis of Algorithms: Lecture#10 Graph Introduction, BFT, DFT, MST, Shortest PathDocumento115 pagineDesign & Analysis of Algorithms: Lecture#10 Graph Introduction, BFT, DFT, MST, Shortest PathZAIN MUSHTAQNessuna valutazione finora
- Tables of Racah Coefficients: Mathematical Tables SeriesDa EverandTables of Racah Coefficients: Mathematical Tables SeriesNessuna valutazione finora
- Sorting: Put Data in Order Based On Many MethodsDocumento35 pagineSorting: Put Data in Order Based On Many MethodsalexistheNessuna valutazione finora
- III. Τεχνολογία κατασκευής VLSI: Matthias BucherDocumento16 pagineIII. Τεχνολογία κατασκευής VLSI: Matthias BucheralexistheNessuna valutazione finora
- Hashing On The Disk: Keys Are Stored in " " (" ") RetrievalDocumento45 pagineHashing On The Disk: Keys Are Stored in " " (" ") RetrievalalexistheNessuna valutazione finora
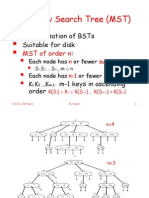
- Multiway Search Tree (MST) : Generalization of Bsts Suitable For DiskDocumento39 pagineMultiway Search Tree (MST) : Generalization of Bsts Suitable For DiskalexistheNessuna valutazione finora
- Balanced BST: Guarantee O (Logn) Performance at All TimesDocumento51 pagineBalanced BST: Guarantee O (Logn) Performance at All TimesalexistheNessuna valutazione finora
- COMP211slides 11Documento36 pagineCOMP211slides 11alexistheNessuna valutazione finora
- COMP211slides 6Documento64 pagineCOMP211slides 6alexistheNessuna valutazione finora
- Technical University of Crete: Data Structures File StructuresDocumento20 pagineTechnical University of Crete: Data Structures File StructuresalexistheNessuna valutazione finora
- COMP211slides 5Documento34 pagineCOMP211slides 5alexistheNessuna valutazione finora
- ACE201slides 8Documento75 pagineACE201slides 8alexistheNessuna valutazione finora
- Algorithm Analysis: Algorithms That Are Equally Correct Can Vary in Their Utilization of Computational ResourcesDocumento36 pagineAlgorithm Analysis: Algorithms That Are Equally Correct Can Vary in Their Utilization of Computational ResourcesalexistheNessuna valutazione finora
- Real Time Fractal Flame RenderingDocumento12 pagineReal Time Fractal Flame RenderingalexistheNessuna valutazione finora
- HMY101slides 9Documento61 pagineHMY101slides 9alexistheNessuna valutazione finora
- ΛΟΓΙΚΗ ΣΧΕΔΙΑΣΗDocumento60 pagineΛΟΓΙΚΗ ΣΧΕΔΙΑΣΗalexistheNessuna valutazione finora
- Gate MCQ Questions On Unit IV-GraphsDocumento16 pagineGate MCQ Questions On Unit IV-Graphsshubham gandhi100% (1)
- Mahedi Final ProjectDocumento15 pagineMahedi Final ProjectMahedi HassanNessuna valutazione finora
- GraphsDocumento29 pagineGraphsVanessaNessuna valutazione finora
- Graph Terminology and Special Types of GraphsDocumento29 pagineGraph Terminology and Special Types of Graphsmaligaya evelynNessuna valutazione finora
- DSQDocumento4 pagineDSQsampurnakumarNessuna valutazione finora
- Graph RepresentationDocumento34 pagineGraph RepresentationTech_MX100% (3)
- CH 02Documento46 pagineCH 02Tấn PhátNessuna valutazione finora
- BCSL 045 Study MaterialDocumento19 pagineBCSL 045 Study MaterialRajendra ShettyNessuna valutazione finora
- BCS304-DSA Notes M-4Documento25 pagineBCS304-DSA Notes M-4sagar2024kNessuna valutazione finora
- Covid 19 Contact Tracing Application Using Graph TheoryDocumento6 pagineCovid 19 Contact Tracing Application Using Graph TheoryShifa SalsabiilaNessuna valutazione finora
- DSC Unit-4Documento30 pagineDSC Unit-4Bandi SirishaNessuna valutazione finora
- Stata Graph Library For Network AnalysisDocumento41 pagineStata Graph Library For Network AnalysisAlexander SainesNessuna valutazione finora
- TechDataStructuresSamplePaper (50questions)Documento12 pagineTechDataStructuresSamplePaper (50questions)RIDDHINessuna valutazione finora
- Chapter 11-Graphs and Their ApplicationsDocumento50 pagineChapter 11-Graphs and Their ApplicationsTanveer Ahmed HakroNessuna valutazione finora
- Daa Week 6Documento3 pagineDaa Week 6Anushka RawatNessuna valutazione finora
- Daa CombinedDocumento407 pagineDaa CombinedmghNessuna valutazione finora
- Lab Activity 15 - GraphsDocumento1 paginaLab Activity 15 - GraphsAdeena SaifullahNessuna valutazione finora
- Lec-14 Graph AlgorithmsDocumento78 pagineLec-14 Graph AlgorithmsAlishba GondalNessuna valutazione finora
- DMS - Skill Jio, U-1 - 5, Google BitsDocumento100 pagineDMS - Skill Jio, U-1 - 5, Google BitsJaswitha VelamuriNessuna valutazione finora
- Week 7: Graph: Data Structures & Algorithm AnalysisDocumento58 pagineWeek 7: Graph: Data Structures & Algorithm Analysisबानि तमिन्Nessuna valutazione finora
- Programming MethodologyDocumento118 pagineProgramming Methodologysaniya khanNessuna valutazione finora
- Training Guide FinalDocumento34 pagineTraining Guide FinalHimanshu RanjanNessuna valutazione finora
- Graph TheoryDocumento81 pagineGraph TheoryKavita Rahane100% (1)
- Practical Journal Sna With WriteupsDocumento37 paginePractical Journal Sna With Writeupssakshi mishraNessuna valutazione finora
- Algorithms Illuminated: Part 2: Graph Algorithms and Data Structures Tim RoughgardenDocumento28 pagineAlgorithms Illuminated: Part 2: Graph Algorithms and Data Structures Tim RoughgardenHarshitShuklaNessuna valutazione finora
- (Pure and Applied Undergraduate Texts 43) Allan Bickle - Fundamentals of Graph Theory (2020, American Mathematical Society) - Libgen - LiDocumento354 pagine(Pure and Applied Undergraduate Texts 43) Allan Bickle - Fundamentals of Graph Theory (2020, American Mathematical Society) - Libgen - Likorombo100% (1)