Potrebbero piacerti anche
- Procedure For AnalysisDocumento22 pagineProcedure For AnalysisOmodibo Oghenekevwe KevinNessuna valutazione finora
- Calculation of TmsDocumento6 pagineCalculation of TmsMihir PatelNessuna valutazione finora
- Practical Controller Design For DummiesDocumento91 paginePractical Controller Design For DummiesManraj Tatla100% (1)
- Electroculture 101 (1st Edition)Documento48 pagineElectroculture 101 (1st Edition)Taiwo Phillips85% (13)
- Protective Relay SettingsDocumento2 pagineProtective Relay SettingsShashiraj ShettigarNessuna valutazione finora
- 160HDocumento27 pagine160Hmtocbv100% (3)
- Load Flow Basic Principles DigsilentDocumento17 pagineLoad Flow Basic Principles Digsilentjcrodriguez83100% (2)
- 06 236730 001 - AbDocumento1 pagina06 236730 001 - Abalejosebm50% (2)
- Chapter 24 - DC Short-Circuit AnalysisDocumento24 pagineChapter 24 - DC Short-Circuit AnalysisRicardo LopezNessuna valutazione finora
- 1.0 Power System StudiesDocumento7 pagine1.0 Power System StudiesL Rahman AliffiantoNessuna valutazione finora
- 140h 5hm Pruebas y Ajustes de Transmision ElectronicaDocumento28 pagine140h 5hm Pruebas y Ajustes de Transmision ElectronicaSebastian Bonello100% (1)
- Distance Protection ApplicationDocumento12 pagineDistance Protection Applicationluiscamposch50% (2)
- 19 - Distance Device ParameterizationDocumento28 pagine19 - Distance Device ParameterizationJose Alberto RodriguezNessuna valutazione finora
- NI Tutorial 4604Documento12 pagineNI Tutorial 4604bamanjunathaNessuna valutazione finora
- Owner Owner Manual Manual: Operator/Installation/Service/Parts Transfer Switch 800-3000 AmpsDocumento172 pagineOwner Owner Manual Manual: Operator/Installation/Service/Parts Transfer Switch 800-3000 AmpshalexNessuna valutazione finora
- The Book of (PLC & SCADA) Dosing System by HMIDocumento102 pagineThe Book of (PLC & SCADA) Dosing System by HMIAwidhi KresnawanNessuna valutazione finora
- IB DP Physics Past Papers Waves QnsDocumento21 pagineIB DP Physics Past Papers Waves QnsJessica GuyNessuna valutazione finora
- Ircuit Reakers: (Theory, Classification, & Applications)Documento28 pagineIrcuit Reakers: (Theory, Classification, & Applications)Syed Muhammad Munavvar Hussain100% (5)
- Service Failure Analysis of D C Motor Co PDFDocumento6 pagineService Failure Analysis of D C Motor Co PDFOmar QatawnehNessuna valutazione finora
- Arc Fault SimulationDocumento7 pagineArc Fault SimulationtunghtdNessuna valutazione finora
- Coordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchDocumento8 pagineCoordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchluhusapaNessuna valutazione finora
- Coordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchDocumento8 pagineCoordination of Relays, Reclosers, and Sectionalizing Fuses For Overhead Lines in The Oil PatchluhusapaNessuna valutazione finora
- Fault Location Estimation with AI TuningDocumento162 pagineFault Location Estimation with AI TuningJose Alberto RodriguezNessuna valutazione finora
- Distance Protection TutorialDocumento20 pagineDistance Protection TutorialAlex F. Palma Soto100% (3)
- CHAP26 Stability and EMT SimulationsDocumento79 pagineCHAP26 Stability and EMT SimulationsROBERT100% (1)
- Astm D 1816-04Documento5 pagineAstm D 1816-04Jonathan LayedraNessuna valutazione finora
- DPP-1 To 8 - Modern Physics - JEEDocumento54 pagineDPP-1 To 8 - Modern Physics - JEEKeerthana Reddy DomaNessuna valutazione finora
- Supervisory SystemsDocumento23 pagineSupervisory Systemspotugaadu1Nessuna valutazione finora
- Distance and Earth Fault Protection PDFDocumento63 pagineDistance and Earth Fault Protection PDFJose Alberto RodriguezNessuna valutazione finora
- SINAMICS DriveDocumento61 pagineSINAMICS Driveطه محمدNessuna valutazione finora
- Transient Stability Analysis Using MiPowerDocumento5 pagineTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- ICEOT Springer Paper ContingencyDocumento11 pagineICEOT Springer Paper ContingencyBipro HabisyasiNessuna valutazione finora
- Transient Stability StudiesDocumento12 pagineTransient Stability StudiesAbhijeet Kumar SinghNessuna valutazione finora
- Engrmece3350u Lab Handbook f2014Documento52 pagineEngrmece3350u Lab Handbook f2014Bob LeeNessuna valutazione finora
- Chapter 33 ETAP User Guide 7 5 2 PDFDocumento32 pagineChapter 33 ETAP User Guide 7 5 2 PDFArturo RamirezNessuna valutazione finora
- Position Control of Brushed DC Motor Using Pid Controller in MatlabDocumento5 paginePosition Control of Brushed DC Motor Using Pid Controller in MatlabJournal 4 Research100% (1)
- Lab 5 ReportDocumento12 pagineLab 5 ReportMelaku DinkuNessuna valutazione finora
- Computer Aided Transient Stability AnalysisDocumento5 pagineComputer Aided Transient Stability AnalysisViresh PatelNessuna valutazione finora
- Dyna DCMC Curriculam ManualDocumento203 pagineDyna DCMC Curriculam ManualDevSinghNessuna valutazione finora
- Small Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurDocumento5 pagineSmall Signal Stability of A Large Power System As Affected by New Generation Additions by Prabha KundurAuspiciousNessuna valutazione finora
- Result PPRDocumento5 pagineResult PPRMayuri Chauray-shindeNessuna valutazione finora
- Transient Stability Analysis of 6 Bus System Using E-TAP SoftwareDocumento10 pagineTransient Stability Analysis of 6 Bus System Using E-TAP SoftwareSaran KuttyNessuna valutazione finora
- OCPS Unit 5Documento15 pagineOCPS Unit 520EPS0701Nessuna valutazione finora
- Applying Control Theory to a Real DC Motor in LabVIEWDocumento5 pagineApplying Control Theory to a Real DC Motor in LabVIEWnorickespinosNessuna valutazione finora
- Architecture of A Fault Diagnosis Expert System For Power Plants ProtectionDocumento5 pagineArchitecture of A Fault Diagnosis Expert System For Power Plants Protectionserg6007Nessuna valutazione finora
- Analisi de Flujo InglesDocumento41 pagineAnalisi de Flujo InglesYunior angel Bautista mallquiNessuna valutazione finora
- Power System Stability Enhancement With Genetically Optimized SVC ControllerDocumento6 paginePower System Stability Enhancement With Genetically Optimized SVC ControllertinazdrilicNessuna valutazione finora
- Transient Stability Margin Prediction Using Equal-Area CriterionDocumento9 pagineTransient Stability Margin Prediction Using Equal-Area CriterionVerruumm AmineNessuna valutazione finora
- Load Flow Analysis Improves Voltage ProfileDocumento24 pagineLoad Flow Analysis Improves Voltage ProfileNjitnumNessuna valutazione finora
- Voltage Control in Power System Using Expert System Based On SCADA SystemDocumento5 pagineVoltage Control in Power System Using Expert System Based On SCADA SystemFABIANCHO2210100% (1)
- Edsa PaladinDocumento35 pagineEdsa PaladinIulian PârjoleanuNessuna valutazione finora
- Chasis DinamométricoDocumento6 pagineChasis Dinamométricojose romeroNessuna valutazione finora
- Midterm Project For: EE392m - Control Engineering in Industry, Spring 2005Documento5 pagineMidterm Project For: EE392m - Control Engineering in Industry, Spring 2005karen dejoNessuna valutazione finora
- Computer Integrated Design and ManufacturingDocumento16 pagineComputer Integrated Design and ManufacturingPrajwal JaiswalNessuna valutazione finora
- Prediction of Critical Clearing Time Using Artificial Neural NetworkDocumento5 paginePrediction of Critical Clearing Time Using Artificial Neural NetworkSaddam HussainNessuna valutazione finora
- Computer Applications in Power SystemsDocumento34 pagineComputer Applications in Power SystemsAlebel AyalnehNessuna valutazione finora
- 1584244366project GiidelineDocumento12 pagine1584244366project Giidelinedavut alkanNessuna valutazione finora
- Siemens Power Engineering Guide 7E 431Documento1 paginaSiemens Power Engineering Guide 7E 431mydearteacherNessuna valutazione finora
- Automatic Phase Selector Fro, Avilable Three Phase With Use of RelaysDocumento37 pagineAutomatic Phase Selector Fro, Avilable Three Phase With Use of RelaysDinesh KumarNessuna valutazione finora
- New9000English Mannual PDFDocumento344 pagineNew9000English Mannual PDFLe Chi Pham100% (1)
- Transient Stability and Enhancement in Power System Research Paper PDFDocumento5 pagineTransient Stability and Enhancement in Power System Research Paper PDFWaleed AbdullahNessuna valutazione finora
- Automatic switch controlDocumento14 pagineAutomatic switch controlbernabasNessuna valutazione finora
- Analog and Digital Motor ControlDocumento28 pagineAnalog and Digital Motor ControlvinNessuna valutazione finora
- Aircraft Block Diagram Reduction and Control SystemsDocumento14 pagineAircraft Block Diagram Reduction and Control SystemsCraig JonesNessuna valutazione finora
- HTTP Etap - Com Dynamics-Transients Transient-StabilityDocumento2 pagineHTTP Etap - Com Dynamics-Transients Transient-Stabilitykolombo1776Nessuna valutazione finora
- QNET Exp1 Speed StudentDocumento18 pagineQNET Exp1 Speed StudentMatheus MaterazziNessuna valutazione finora
- hệ thống kích từ trong nhà máy thủy điệnDocumento344 paginehệ thống kích từ trong nhà máy thủy điệnTung NguyenNessuna valutazione finora
- Contingency Alysis BaselineDocumento44 pagineContingency Alysis BaselinevaseemalikhanNessuna valutazione finora
- Building a Low Power Motor Test BenchDocumento5 pagineBuilding a Low Power Motor Test BenchAgustin BrianeseNessuna valutazione finora
- ArcFlash Example8Documento7 pagineArcFlash Example8Fabian Andres Calderon HernandezNessuna valutazione finora
- Contoh ETAP 2Documento6 pagineContoh ETAP 2Ken Rama AdityoNessuna valutazione finora
- Emcw 2001 Artesis PaperDocumento5 pagineEmcw 2001 Artesis Paperವಿಶ್ವನಾಥ ಸಿNessuna valutazione finora
- CNC MID 2 KEYDocumento6 pagineCNC MID 2 KEYpala srinivas reddyNessuna valutazione finora
- 9bus System, Power FlowDocumento17 pagine9bus System, Power FlowZeeshan AhmedNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Distance Coordination PDFDocumento16 pagineDistance Coordination PDFJose Alberto RodriguezNessuna valutazione finora
- 062 FluorescentDocumento17 pagine062 Fluorescent이지언Nessuna valutazione finora
- GCC Cigre05 Paper Iec61850finDocumento8 pagineGCC Cigre05 Paper Iec61850finJose Alberto RodriguezNessuna valutazione finora
- Light Emitting Diodes (Leds) : Ele 432 Assignment # 3 Vijay Kumar PeddintiDocumento14 pagineLight Emitting Diodes (Leds) : Ele 432 Assignment # 3 Vijay Kumar Peddintimhf394Nessuna valutazione finora
- Light Emitting Diodes (Leds) : Ele 432 Assignment # 3 Vijay Kumar PeddintiDocumento14 pagineLight Emitting Diodes (Leds) : Ele 432 Assignment # 3 Vijay Kumar Peddintimhf394Nessuna valutazione finora
- High Resistance Ground Application GuideDocumento56 pagineHigh Resistance Ground Application GuideRoger Arturo Paternina Sanchez100% (1)
- ManTD Lineprot-1-3pol EnUSDistancia Siemens 7SA8XDocumento98 pagineManTD Lineprot-1-3pol EnUSDistancia Siemens 7SA8XJose Alberto RodriguezNessuna valutazione finora
- Transformers Differential Relay TroubleshootingDocumento22 pagineTransformers Differential Relay TroubleshootingAdrian ZeetwoNessuna valutazione finora
- Conceitos Curvas Seletividade 02 - 05 - 12Documento18 pagineConceitos Curvas Seletividade 02 - 05 - 12Jose Alberto RodriguezNessuna valutazione finora
- Fórmulas de ReactoresDocumento0 pagineFórmulas de ReactoresJose Alberto RodriguezNessuna valutazione finora
- How To Use V141Documento65 pagineHow To Use V141Jose Alberto RodriguezNessuna valutazione finora
- EarthingDocumento40 pagineEarthingSaurabh SethNessuna valutazione finora
- Fórmulas de ReactoresDocumento0 pagineFórmulas de ReactoresJose Alberto RodriguezNessuna valutazione finora
- Advanced Fault AnalysisDocumento7 pagineAdvanced Fault AnalysisJose Alberto RodriguezNessuna valutazione finora
- ReadmeDocumento1 paginaReadmeJose Alberto RodriguezNessuna valutazione finora
- Transformers Differential Relay TroubleshootingDocumento22 pagineTransformers Differential Relay TroubleshootingAdrian ZeetwoNessuna valutazione finora
- DSC Powerseries Control Panels: Powering ChangeDocumento4 pagineDSC Powerseries Control Panels: Powering ChangeCristea RaulNessuna valutazione finora
- Eat OnDocumento62 pagineEat Ondinakaran2020Nessuna valutazione finora
- Subtransmission ProtectionDocumento9 pagineSubtransmission ProtectionJose Alberto RodriguezNessuna valutazione finora
- Digital Fiber Sensor Amplifier FX-301 (P) : WarningDocumento4 pagineDigital Fiber Sensor Amplifier FX-301 (P) : WarningGaurav KNessuna valutazione finora
- Digital Multimeters 34460A, 34461A, 34465A (6 Digit), 34470A (7 Digit)Documento28 pagineDigital Multimeters 34460A, 34461A, 34465A (6 Digit), 34470A (7 Digit)Ana MariaNessuna valutazione finora
- Calculate Total Apparent, Average and Reactive Power in 3-Phase - Electrical Engineering Stack ExchangeDocumento3 pagineCalculate Total Apparent, Average and Reactive Power in 3-Phase - Electrical Engineering Stack ExchangeNikšaNessuna valutazione finora
- MS25205GDocumento5 pagineMS25205GGülinNessuna valutazione finora
- Digital Water Bath Operating ManualDocumento8 pagineDigital Water Bath Operating Manualرشا خليل موسىNessuna valutazione finora
- Requirements For Electrical Installations - IET Wiring - The Institution of Engineering and Technology - 18.2, 2022 - Electrical RegulationsDocumento613 pagineRequirements For Electrical Installations - IET Wiring - The Institution of Engineering and Technology - 18.2, 2022 - Electrical Regulationsprotayto04Nessuna valutazione finora
- pm402 NardaDocumento4 paginepm402 NardaflegiasNessuna valutazione finora
- Source Degeneration TheoryDocumento9 pagineSource Degeneration TheoryAbhishek KumarNessuna valutazione finora
- TdaDocumento7 pagineTdaΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNessuna valutazione finora
- SR208C PDFDocumento35 pagineSR208C PDFAngel Pérez SantiagoNessuna valutazione finora
- Albany 03 05 08 - RefDocumento2 pagineAlbany 03 05 08 - RefJulio VergaraNessuna valutazione finora
- Units in Electricity and MagnetismDocumento8 pagineUnits in Electricity and MagnetismnandhakumarmeNessuna valutazione finora
- Contactors (18AF) : DescriptionDocumento32 pagineContactors (18AF) : DescriptionRobiNessuna valutazione finora
- DatasheetDocumento3 pagineDatasheetHamza AbbasNessuna valutazione finora
- Instrument Transformer Test Set V-A MintiDocumento5 pagineInstrument Transformer Test Set V-A MintiEdgar JimenezNessuna valutazione finora
- Andrew FXL-780Documento4 pagineAndrew FXL-780AbeSalNessuna valutazione finora
- Mechanical Test Report (51252731-Ea)Documento14 pagineMechanical Test Report (51252731-Ea)Nguyen ngoc thongNessuna valutazione finora
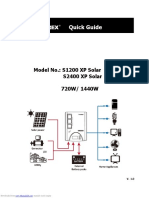
- Quick Guide to Solar Inverter InstallationDocumento15 pagineQuick Guide to Solar Inverter InstallationSalman ArainNessuna valutazione finora
- Standard Definitions of Terms Relating To Overhead-Power-Line Corona and Radio NoiseDocumento14 pagineStandard Definitions of Terms Relating To Overhead-Power-Line Corona and Radio NoiselichirNessuna valutazione finora
- Op - Amp.741 and 555 ICDocumento6 pagineOp - Amp.741 and 555 ICManojkumarNessuna valutazione finora
- Logic GatesDocumento8 pagineLogic GatesNikunj ThakkarNessuna valutazione finora
- Modular Ot Room-JinyiDocumento7 pagineModular Ot Room-JinyiMasfia AgtNessuna valutazione finora
- Practical Electronics 1969 07Documento76 paginePractical Electronics 1969 07Carlos SoaresNessuna valutazione finora
- Polymer Suspension Insulator: Catalog # 502-SC1450-EEDocumento1 paginaPolymer Suspension Insulator: Catalog # 502-SC1450-EEConstantNessuna valutazione finora