Potrebbero piacerti anche
- Adc Lab Pic18Documento23 pagineAdc Lab Pic18Bolarinwa Joseph100% (1)
- Design and Implementation of Pulse Code Modulation Using Matlab SimulinkDocumento4 pagineDesign and Implementation of Pulse Code Modulation Using Matlab SimulinkAprialdy StreetfootballNessuna valutazione finora
- Interfacing Programs For 8085Documento37 pagineInterfacing Programs For 8085archankumarturagaNessuna valutazione finora
- PIC Timer 0 Calculation ExampleDocumento3 paginePIC Timer 0 Calculation Examplef.last100% (1)
- RP Jain Adc DacDocumento27 pagineRP Jain Adc DacAnand SinghNessuna valutazione finora
- Circuit TodayDocumento30 pagineCircuit TodayBrian GiriNessuna valutazione finora
- 0 - MPMC Lab Manual A.Y. 2020-21 R-18Documento53 pagine0 - MPMC Lab Manual A.Y. 2020-21 R-18Karthik BoggarapuNessuna valutazione finora
- Robotprojects Ver7.5.4Documento203 pagineRobotprojects Ver7.5.4Adel AshyapNessuna valutazione finora
- DAC InterfacingDocumento6 pagineDAC InterfacingSumeet SainiNessuna valutazione finora
- Important Instructions To Examiners:: (Autonomous)Documento29 pagineImportant Instructions To Examiners:: (Autonomous)Rohit Shinde RSNessuna valutazione finora
- CISE414 - Unit 04 AVR Atmega PortsDocumento30 pagineCISE414 - Unit 04 AVR Atmega Portsمحمد حمدNessuna valutazione finora
- Interfacing ADC With 8051Documento15 pagineInterfacing ADC With 8051Pavan Kumar N100% (1)
- Ilovepdf MergedDocumento430 pagineIlovepdf MergedYuvraj ChhabraNessuna valutazione finora
- 8279 Keyboard and Display ControllerDocumento33 pagine8279 Keyboard and Display Controllergutzz0079197100% (1)
- Part III 8051 General PgmsDocumento7 paginePart III 8051 General PgmsHEMANessuna valutazione finora
- MCB2300 CanDocumento14 pagineMCB2300 CanMichaelNessuna valutazione finora
- How To Interfacing Sensor With LPC2148 ARMDocumento8 pagineHow To Interfacing Sensor With LPC2148 ARMSubir MaityNessuna valutazione finora
- Microcontroller and Embedded SystemsDocumento2 pagineMicrocontroller and Embedded SystemsIndranilNessuna valutazione finora
- Micro Controller Lab Manual 1Documento38 pagineMicro Controller Lab Manual 1Suresh KumarNessuna valutazione finora
- To Make A DC Switching Circuit Using SCR'sDocumento2 pagineTo Make A DC Switching Circuit Using SCR'sH Aries OñaNessuna valutazione finora
- 25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentDocumento84 pagine25.ACCESSIBLE DISPLAY DESIGN TO CONTROL HOME AREA NETWORKSDocumentdileeppatraNessuna valutazione finora
- Microcontrollers and Embedded SystemsDocumento35 pagineMicrocontrollers and Embedded SystemsTarek BarhoumNessuna valutazione finora
- "Keypad and LCD Interfacing Using MicrocontrollerDocumento23 pagine"Keypad and LCD Interfacing Using MicrocontrollerKamal PatidarNessuna valutazione finora
- Intro To Embedded Systems - AMIT - NewDocumento73 pagineIntro To Embedded Systems - AMIT - NewOmar EzzNessuna valutazione finora
- LCD and Keyboard Interfacing: Unit VDocumento21 pagineLCD and Keyboard Interfacing: Unit VrushitaaNessuna valutazione finora
- On DTHDocumento23 pagineOn DTHAkash Tyagi100% (2)
- Accident Detection and Alert System Based On ARM7 MicrocontrollerDocumento4 pagineAccident Detection and Alert System Based On ARM7 MicrocontrollersophiyasharanNessuna valutazione finora
- Sat - Ak-1703-Acp - PDF (1.004kb)Documento6 pagineSat - Ak-1703-Acp - PDF (1.004kb)Kültigin KaracaNessuna valutazione finora
- Keyboard I 8051Documento3 pagineKeyboard I 8051sachinshymNessuna valutazione finora
- LPC2148 User ManualDocumento62 pagineLPC2148 User ManualAri Krishnan0% (2)
- Railway Track Security SystmDocumento28 pagineRailway Track Security SystmNikhil Hosur0% (1)
- 8051 Interfacing With Display SevicesDocumento5 pagine8051 Interfacing With Display Sevicesramjee26100% (1)
- DHT11 Arduino InterfacingDocumento13 pagineDHT11 Arduino InterfacingfeteneNessuna valutazione finora
- 8051 PPT For MSCDocumento138 pagine8051 PPT For MSCvikash sharmaNessuna valutazione finora
- Verify Four Voltage and Current Parameters For TTL and Cmos (Ic 74Lsxx, 74Hcxx)Documento8 pagineVerify Four Voltage and Current Parameters For TTL and Cmos (Ic 74Lsxx, 74Hcxx)sonalibhagwatkar100% (1)
- Ec - 501 - Microprocessor and Its ApplicationDocumento41 pagineEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareNessuna valutazione finora
- Ntroduction To ARM7 LPC2148 MicrocontrollerDocumento5 pagineNtroduction To ARM7 LPC2148 MicrocontrollercaseguysNessuna valutazione finora
- Timer Counter in ARM7 (LPC2148) : Aarav SoniDocumento26 pagineTimer Counter in ARM7 (LPC2148) : Aarav SoniMatthew BattleNessuna valutazione finora
- MPMC Unit4Documento61 pagineMPMC Unit4Nandhini ShreeNessuna valutazione finora
- New Generation Polling Method Using RFDocumento10 pagineNew Generation Polling Method Using RFEnoch IsraelNessuna valutazione finora
- Temperature Sensing/Monitoring Using Lm35 & Atmega8Documento6 pagineTemperature Sensing/Monitoring Using Lm35 & Atmega8Suket75% (4)
- Project Report - VHDL MUXDocumento4 pagineProject Report - VHDL MUXMsdmsd Msd100% (1)
- Source Port: 16 Bits: TCP Header FormatDocumento6 pagineSource Port: 16 Bits: TCP Header Format254186Nessuna valutazione finora
- What Is Speaker ?Documento3 pagineWhat Is Speaker ?Siva ViratNessuna valutazione finora
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDocumento33 pagineUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNessuna valutazione finora
- SST89e51 Programming ManualDocumento9 pagineSST89e51 Programming Manualrudra_150% (2)
- Chua (2005) - Blood Pressure Meter (Freescale An 1571)Documento8 pagineChua (2005) - Blood Pressure Meter (Freescale An 1571)hrgsstfn8Nessuna valutazione finora
- Processor Architecture and Interfacing: Part 13: The 8255 PPIDocumento24 pagineProcessor Architecture and Interfacing: Part 13: The 8255 PPIPalash ParmarNessuna valutazione finora
- DSP - Mod 6 PPT 1Documento37 pagineDSP - Mod 6 PPT 1oxygen oxygenNessuna valutazione finora
- 8086 Trainer Kit User and Technical Reference Manual PDFDocumento71 pagine8086 Trainer Kit User and Technical Reference Manual PDFJohn Johnston0% (1)
- Universal Asynchronous Receiver Transmitter (UART)Documento38 pagineUniversal Asynchronous Receiver Transmitter (UART)Chandresh Trivedi100% (1)
- 8251A USART - Programmable Communication InterfaceDocumento15 pagine8251A USART - Programmable Communication InterfaceselvaNessuna valutazione finora
- Jyothi Engineering College: Lab ManualDocumento11 pagineJyothi Engineering College: Lab Manualtmsbharadwaj100% (1)
- 8,16,32 Floating Point Processing in ARMDocumento25 pagine8,16,32 Floating Point Processing in ARMOMKAR BHILARE100% (1)
- Adc0808 and 8253Documento35 pagineAdc0808 and 8253Avanish NiranjanNessuna valutazione finora
- Interfacing Analog To Digital Data ConvertersDocumento16 pagineInterfacing Analog To Digital Data ConvertersPrabin123Nessuna valutazione finora
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDa EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNessuna valutazione finora
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationDa EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationNessuna valutazione finora
- High Speed Edge Detection Inside A Sequential Block in VerilogDocumento2 pagineHigh Speed Edge Detection Inside A Sequential Block in VeriloghypernuclideNessuna valutazione finora
- Arcade Snake Game Using VerilogDocumento11 pagineArcade Snake Game Using Veriloghypernuclide100% (3)
- Xilinx Device Drivers ApiDocumento1.213 pagineXilinx Device Drivers ApihypernuclideNessuna valutazione finora
- Analysis of Case StatementsDocumento9 pagineAnalysis of Case StatementshypernuclideNessuna valutazione finora
- Vxworks Network Programming GuideDocumento239 pagineVxworks Network Programming Guidehypernuclide100% (2)
- Lpc213xx and Nokia7110Documento17 pagineLpc213xx and Nokia7110hypernuclideNessuna valutazione finora
- QET Using EM FieldDocumento29 pagineQET Using EM FieldhypernuclideNessuna valutazione finora
- User Manual lpc2141 lpc2142 lpc2144 lpc2146 lpc2148Documento354 pagineUser Manual lpc2141 lpc2142 lpc2144 lpc2146 lpc2148banik.chandanNessuna valutazione finora
- Installing Mini XML With Sample ProgramDocumento4 pagineInstalling Mini XML With Sample ProgramhypernuclideNessuna valutazione finora
- Interfacing LCD in 4bit Mode With lpc2138Documento6 pagineInterfacing LCD in 4bit Mode With lpc2138hypernuclide100% (2)
- Rubric For Case StudyDocumento1 paginaRubric For Case StudyCj NavarroNessuna valutazione finora
- A Research Submitted To: Student ResearchersDocumento4 pagineA Research Submitted To: Student ResearchersDorothy Ann AllurinNessuna valutazione finora
- HARTING Industrial Connectors Han: Short Form CatalogueDocumento40 pagineHARTING Industrial Connectors Han: Short Form CatalogueFabrizio AugustoNessuna valutazione finora
- Selected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Documento9 pagineSelected Books For Electronic Hobby Center (EHC) : A. Books (Available in The Resource Centre)Rajalakshmi BashyamNessuna valutazione finora
- 1.yes Bank: Human Capital Initiatives of A Startup in The Indian Banking IndustryDocumento10 pagine1.yes Bank: Human Capital Initiatives of A Startup in The Indian Banking IndustryManvi JainNessuna valutazione finora
- G 342 Engine Part 1 PDFDocumento26 pagineG 342 Engine Part 1 PDFharley florezNessuna valutazione finora
- ALV List and ALV GridDocumento6 pagineALV List and ALV Gridlavi2Nessuna valutazione finora
- Abstract Superstructure Conc - Frame WestgateDocumento2 pagineAbstract Superstructure Conc - Frame WestgateTashamiswa MajachaniNessuna valutazione finora
- KBC Nano in English PDFDocumento57 pagineKBC Nano in English PDFBHUKKAD BOX100% (1)
- Chapter 8 - 1935 Rife Ray #4 Rife MachineDocumento2 pagineChapter 8 - 1935 Rife Ray #4 Rife MachineKhalid IbrahimNessuna valutazione finora
- Radio Training SlidesDocumento62 pagineRadio Training Slidesmymuberra807100% (1)
- HSC Chemistry SkillsDocumento9 pagineHSC Chemistry SkillsMartin KarlowNessuna valutazione finora
- Business Value of Bim in Middle EastDocumento52 pagineBusiness Value of Bim in Middle EastshahbazdgNessuna valutazione finora
- Dbms Lab Manual-2013Documento27 pagineDbms Lab Manual-2013Arham JainNessuna valutazione finora
- MSDS - LPGDocumento9 pagineMSDS - LPGPrathamesh ShevaleNessuna valutazione finora
- Geothermal Project TimelinesDocumento10 pagineGeothermal Project TimelinesAldwin EncarnacionNessuna valutazione finora
- How Cell Phones WorkDocumento12 pagineHow Cell Phones Workavinash_knitNessuna valutazione finora
- Kota StationDocumento5 pagineKota StationshashankjeeNessuna valutazione finora
- PTX PRM PGL T5 750929eDocumento382 paginePTX PRM PGL T5 750929eListiyo Imam SantosoNessuna valutazione finora
- Unit - 1: (B) Difference Between Thermodynamcis and Heat TransferDocumento66 pagineUnit - 1: (B) Difference Between Thermodynamcis and Heat TransferSayyadh Rahamath Baba100% (1)
- (DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414Documento13 pagine(DOC) Makalah Sistem Endokrin - YENNA PUTRI - Academia - Edu183414dominggus kakaNessuna valutazione finora
- JFo 2 1 PDFDocumento45 pagineJFo 2 1 PDFAkbar WisnuNessuna valutazione finora
- Chapter 4 (Digital Modulation) - Review: Pulses - PAM, PWM, PPM Binary - Ask, FSK, PSK, BPSK, DBPSK, PCM, QamDocumento7 pagineChapter 4 (Digital Modulation) - Review: Pulses - PAM, PWM, PPM Binary - Ask, FSK, PSK, BPSK, DBPSK, PCM, QamMuhamad FuadNessuna valutazione finora
- 2.0 Intro To Small Basic GraphicsDocumento18 pagine2.0 Intro To Small Basic GraphicspatoturboNessuna valutazione finora
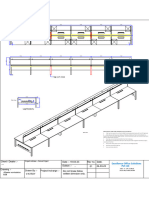
- 6seater Workstation B2BDocumento1 pagina6seater Workstation B2BDid ProjectsNessuna valutazione finora
- Improvements in Offshore Pipeline Cathodic ProtectionDocumento6 pagineImprovements in Offshore Pipeline Cathodic ProtectionEddy Norman Benites DelgadoNessuna valutazione finora
- SAP MM Module OverviewDocumento15 pagineSAP MM Module OverviewAmit Kumar100% (1)
- VW Piezometer Input Calculation Sheet V1.1Documento5 pagineVW Piezometer Input Calculation Sheet V1.1Gauri 'tika' Kartika100% (1)
- Guidelines For Layout and Format of The Proposal: 1. Page Margins (For All Pages) - Use A4 Size PaperDocumento3 pagineGuidelines For Layout and Format of The Proposal: 1. Page Margins (For All Pages) - Use A4 Size PaperAummy CreationNessuna valutazione finora
- ASME B16.47 Series A FlangeDocumento5 pagineASME B16.47 Series A FlangePhạm Trung HiếuNessuna valutazione finora