Potrebbero piacerti anche
- Kathrein PDFDocumento12 pagineKathrein PDFTDMA2009Nessuna valutazione finora
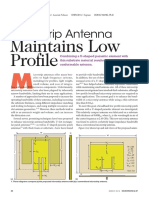
- Microstrip Antenna PDFDocumento4 pagineMicrostrip Antenna PDFTDMA2009Nessuna valutazione finora
- CST Application Note - Dual Band GSM Antenna PDFDocumento6 pagineCST Application Note - Dual Band GSM Antenna PDFTDMA2009Nessuna valutazione finora
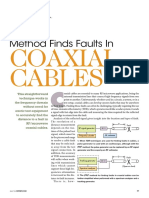
- Method Finds Faults In: Coaxial CablesDocumento4 pagineMethod Finds Faults In: Coaxial CablesTDMA2009Nessuna valutazione finora
- The Basic Configuration of 5928 and 2920: 1 PrepareDocumento7 pagineThe Basic Configuration of 5928 and 2920: 1 PrepareTDMA2009Nessuna valutazione finora
- A Novel Miniature Edge Fed Planar Inverted-F Antenna (PIFA) For Future 5G Wireless DevicesDocumento3 pagineA Novel Miniature Edge Fed Planar Inverted-F Antenna (PIFA) For Future 5G Wireless DevicesTDMA2009Nessuna valutazione finora
- Microstrip AntennaDocumento5 pagineMicrostrip AntennaTDMA2009Nessuna valutazione finora
- ZXSDR BS8800 Installation Criterion: Prepared By-Rajesh K GauravDocumento27 pagineZXSDR BS8800 Installation Criterion: Prepared By-Rajesh K GauravTDMA2009Nessuna valutazione finora
- Brendan Martin - Airspeed PDFDocumento19 pagineBrendan Martin - Airspeed PDFTDMA2009Nessuna valutazione finora
- 11410-00984A-PAM4 Demands Accurate S-parameters-WP PDFDocumento15 pagine11410-00984A-PAM4 Demands Accurate S-parameters-WP PDFTDMA2009Nessuna valutazione finora
- GSM Architecture FreeDocumento20 pagineGSM Architecture FreeTDMA2009Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Control System Question BankDocumento12 pagineControl System Question BankKarthik NagarajanNessuna valutazione finora
- BJT Frequency ResponseDocumento48 pagineBJT Frequency ResponseMirl JohvanNessuna valutazione finora
- SK08A Addressable Loop-Powered Siren Installation Sheet (Multilingual) R2.0Documento12 pagineSK08A Addressable Loop-Powered Siren Installation Sheet (Multilingual) R2.0123vb123Nessuna valutazione finora
- Matched FilterssDocumento8 pagineMatched FilterssPaidamoyo MuzvidziwaNessuna valutazione finora
- Introduction To Acoustics by B&K PDFDocumento44 pagineIntroduction To Acoustics by B&K PDFSuhas BharadwajNessuna valutazione finora
- D2 ManualDocumento4 pagineD2 ManualGabi SuciuNessuna valutazione finora
- Cross Box Manual R 10Documento16 pagineCross Box Manual R 10ZalNessuna valutazione finora
- Place Value Chart With DecimalDocumento3 paginePlace Value Chart With DecimalVictoria BostanNessuna valutazione finora
- Passive Crossover Design Calculator 2.03Documento43 paginePassive Crossover Design Calculator 2.03Florin Dira100% (1)
- IIR Vs FIRDocumento10 pagineIIR Vs FIRPattinson NguyenNessuna valutazione finora
- Butterfly Diagram - WikipediaDocumento3 pagineButterfly Diagram - WikipediaHashimIdreesNessuna valutazione finora
- WMB 9 Color Hong PDFDocumento40 pagineWMB 9 Color Hong PDFfabioboogNessuna valutazione finora
- Book Review - Blake PDFDocumento64 pagineBook Review - Blake PDFOdellien SajaNessuna valutazione finora
- A Novel Approach of Ceramic Tile Crack Detection Using Morphological OperationsDocumento9 pagineA Novel Approach of Ceramic Tile Crack Detection Using Morphological OperationsAayan ShahNessuna valutazione finora
- Alt CodesDocumento9 pagineAlt CodesKSchuNessuna valutazione finora
- An 04 TypicalSignalAmpDocumento5 pagineAn 04 TypicalSignalAmpIka DhivtyasariNessuna valutazione finora
- Maag EQ4 ManualDocumento2 pagineMaag EQ4 ManualClément GillauxNessuna valutazione finora
- Lab 1Documento39 pagineLab 1Nausheeda Bint ShahulNessuna valutazione finora
- Wide Band FM If DemodulatorDocumento28 pagineWide Band FM If DemodulatorA. Villa100% (1)
- Department of Electronics and Instrumentation Internal Assessment Test - IIIDocumento2 pagineDepartment of Electronics and Instrumentation Internal Assessment Test - IIIkrushnasamy subramaniyanNessuna valutazione finora
- Analog Vs DigitalDocumento2 pagineAnalog Vs DigitalParul NarulaNessuna valutazione finora
- MIMO FM-CW Radar Using Beat Signal Averaging MethodDocumento3 pagineMIMO FM-CW Radar Using Beat Signal Averaging MethodBernard AndrysNessuna valutazione finora
- Arduino Based Automated Test Equipment (Progress Report) : Group MembersDocumento13 pagineArduino Based Automated Test Equipment (Progress Report) : Group MembersMahnoor SalmanNessuna valutazione finora
- Amplitude Modulation ReceptionDocumento28 pagineAmplitude Modulation ReceptionRennel MallariNessuna valutazione finora
- Professional Power Amplifiers: SpecificationsDocumento4 pagineProfessional Power Amplifiers: SpecificationssimonNessuna valutazione finora
- AudioDocumento26 pagineAudiowirelesssoulNessuna valutazione finora
- Kashyap IpDocumento20 pagineKashyap IpPranjal PaulNessuna valutazione finora
- Service Manual: Model: MAXIDRIVE3.4Documento42 pagineService Manual: Model: MAXIDRIVE3.4wacawacaNessuna valutazione finora
- Feature Extraction Using MFCCDocumento8 pagineFeature Extraction Using MFCCsipijNessuna valutazione finora
- A Method For The Auto-Calibration of PID ControllersDocumento13 pagineA Method For The Auto-Calibration of PID ControllersLamNessuna valutazione finora