Potrebbero piacerti anche
- Circuit Topologies For Single-PhaseDocumento9 pagineCircuit Topologies For Single-PhaseMd QutubuddinNessuna valutazione finora
- DC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierDocumento11 pagineDC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierRajni YadavNessuna valutazione finora
- PWM 2 Level and 3 LevelDocumento7 paginePWM 2 Level and 3 LevelnewrajasinghNessuna valutazione finora
- 01413552Documento8 pagine01413552Nalin Lochan GuptaNessuna valutazione finora
- PWM Rectifier Design Lab ReportDocumento12 paginePWM Rectifier Design Lab ReportSarika ChauhanNessuna valutazione finora
- A Novel Control Scheme of A ParallelDocumento8 pagineA Novel Control Scheme of A ParallelTetiHidayatiNessuna valutazione finora
- Ieee Current ModeDocumento7 pagineIeee Current ModepqqpNessuna valutazione finora
- A New Passive 28-Step Current Shaper For Three-Phase RectificationDocumento8 pagineA New Passive 28-Step Current Shaper For Three-Phase Rectificationkishor reddyNessuna valutazione finora
- Bi-Dirctional Acdc Converter Based On Neutral Point ClampedDocumento6 pagineBi-Dirctional Acdc Converter Based On Neutral Point ClampedphieuxuatkhoNessuna valutazione finora
- Active Front End PWM Rectifier ProblemsDocumento5 pagineActive Front End PWM Rectifier Problemsmv1970Nessuna valutazione finora
- 20 The Essence of ThreePhase INTELEC2011Documento28 pagine20 The Essence of ThreePhase INTELEC2011noreuNessuna valutazione finora
- 3 Phase Full Wave Bridge ConverterDocumento4 pagine3 Phase Full Wave Bridge Convertersubhasishpodder100% (1)
- Analysis of 12 Pulse Phase Control AC DC ConverterDocumento10 pagineAnalysis of 12 Pulse Phase Control AC DC ConverterRizky Patra JayaNessuna valutazione finora
- 125 130 PDFDocumento6 pagine125 130 PDFJubin JainNessuna valutazione finora
- Design of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterDocumento5 pagineDesign of Single Phase Cyclo-Converter Using Cascaded Multilevel InverterInternational Organization of Scientific Research (IOSR)Nessuna valutazione finora
- Cascaded Theory - FullDocumento14 pagineCascaded Theory - FullTJPRC PublicationsNessuna valutazione finora
- Single-Phase Five-Level Inverter With Less Number of Power Elements For Grid ConnectionDocumento7 pagineSingle-Phase Five-Level Inverter With Less Number of Power Elements For Grid Connectionvinay kumarNessuna valutazione finora
- A Unity Power Factor Converter Using HalfDocumento14 pagineA Unity Power Factor Converter Using HalfLivia Faria PeresNessuna valutazione finora
- A New PWM DimmerDocumento5 pagineA New PWM DimmerNeeraj MuralidharanNessuna valutazione finora
- A Space Vector-Based Rectifier Regulator For AC DC AC ConvertersDocumento7 pagineA Space Vector-Based Rectifier Regulator For AC DC AC ConvertersSofia FrlNessuna valutazione finora
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocumento6 pagineImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNessuna valutazione finora
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocumento6 pagineMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadNessuna valutazione finora
- High Power Factor RectifiersDocumento6 pagineHigh Power Factor RectifiersmujahidfadelNessuna valutazione finora
- ECE 301 Electronics 1: A. Half-Wave RectificationDocumento24 pagineECE 301 Electronics 1: A. Half-Wave RectificationVince Hugo GutibNessuna valutazione finora
- DC-DC Converter: Four Switches V V 2, Capacitive Turn-Off Snubbing, ZV Turn-OnDocumento10 pagineDC-DC Converter: Four Switches V V 2, Capacitive Turn-Off Snubbing, ZV Turn-OnRomitan AlexandraNessuna valutazione finora
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocumento7 pagineControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelNessuna valutazione finora
- Expt 4-Dc Power SupplyDocumento3 pagineExpt 4-Dc Power SupplyAnurag SinhaNessuna valutazione finora
- MATLAB Based Analysis and Simulation of Multilevel InvertersDocumento3 pagineMATLAB Based Analysis and Simulation of Multilevel InvertersArunkumar ValusaNessuna valutazione finora
- Controlled RectifiersDocumento19 pagineControlled Rectifiersbalaji1986Nessuna valutazione finora
- A Bidirectional, Sinusoidal, High-Frequency Inverter Design: AbstractDocumento7 pagineA Bidirectional, Sinusoidal, High-Frequency Inverter Design: AbstractJoe CkhoNessuna valutazione finora
- Ridley 1991Documento10 pagineRidley 1991mounicapaluru_351524Nessuna valutazione finora
- Control Strategy For Three-Phase PWM Boost Rectifier Operating Under Different Supplyvoltage ConditionsDocumento18 pagineControl Strategy For Three-Phase PWM Boost Rectifier Operating Under Different Supplyvoltage ConditionsHoàngMạnhTuấnNessuna valutazione finora
- 6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDocumento16 pagine6 Michal KNAPCZYK Krzysztof PIENKOWSKI 2 PDFDevendra HoleyNessuna valutazione finora
- Three-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveDocumento6 pagineThree-Phase PWM Rectifier With Constant Switching Frequency: Abstract - in This Paper, A Novel AdaptiveKuntal SatpathiNessuna valutazione finora
- Active Power Factor Correction Technique For Single Phase Full Bridge RectifierDocumento6 pagineActive Power Factor Correction Technique For Single Phase Full Bridge RectifierAnand KumarNessuna valutazione finora
- 2011 Important PDFDocumento6 pagine2011 Important PDFShaheer DurraniNessuna valutazione finora
- Sixty Pulse AC-DC Controlled Multipulse Converter For Total Harmonic ReductionDocumento4 pagineSixty Pulse AC-DC Controlled Multipulse Converter For Total Harmonic ReductionerpublicationNessuna valutazione finora
- Single-Inductor Multiple-Output DC-DC ConvertersDocumento22 pagineSingle-Inductor Multiple-Output DC-DC Convertersvietanh_askNessuna valutazione finora
- PES Lab Report 1Documento22 paginePES Lab Report 1UJJAL CHATTERJEENessuna valutazione finora
- 04285962, DJSDocumento9 pagine04285962, DJSDeepu ChinnaNessuna valutazione finora
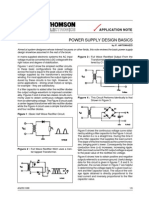
- 1707 An253 Power Supply Design Basics ImpDocumento6 pagine1707 An253 Power Supply Design Basics ImpbmmostefaNessuna valutazione finora
- ReportDocumento83 pagineReportNikita SaxenaNessuna valutazione finora
- 12-Pulse Series-Type Diode RectifierDocumento8 pagine12-Pulse Series-Type Diode RectifierSheetal VermaNessuna valutazione finora
- Simulation and Experimental Results of 7-Level Inverter SystemDocumento8 pagineSimulation and Experimental Results of 7-Level Inverter Systembacuoc.nguyen356Nessuna valutazione finora
- Modeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorDocumento6 pagineModeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorLelosPinelos123Nessuna valutazione finora
- Maswood 01035144Documento9 pagineMaswood 01035144rahulanlNessuna valutazione finora
- Three Phase DC To Ac InverterDocumento44 pagineThree Phase DC To Ac Inverternoor deen100% (1)
- 9.mohamed Ezzat - Final PaperDocumento12 pagine9.mohamed Ezzat - Final PaperiisteNessuna valutazione finora
- Diode Rectifier Then Provides A Full-WaveDocumento4 pagineDiode Rectifier Then Provides A Full-Waveprem035Nessuna valutazione finora
- Power Supply Design Basics: Figure 3: Full Wave Rectified Output From TheDocumento6 paginePower Supply Design Basics: Figure 3: Full Wave Rectified Output From Theprotesto06Nessuna valutazione finora
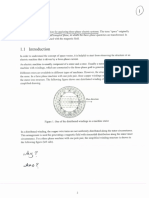
- Introduction To Power SuppliesDocumento6 pagineIntroduction To Power SuppliesbhairavahNessuna valutazione finora
- Design Considerations For Asymmetric Half Bridge ConvertersDocumento16 pagineDesign Considerations For Asymmetric Half Bridge ConvertersGuilhermeFerreiraNessuna valutazione finora
- New Type Single-Stage DC Ac InverterDocumento5 pagineNew Type Single-Stage DC Ac InverterqiwatingNessuna valutazione finora
- Asymmetrical Full-Bridge ConverterDocumento9 pagineAsymmetrical Full-Bridge ConverterAthiesh KumarNessuna valutazione finora
- An Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeDocumento3 pagineAn Active Input Current Waveshaping With Zero Switching Losses For Three-Phase Circuit Using Power DiodeIDESNessuna valutazione finora
- New PWM Inverter For Photovoltaic: A Power Generation SystemDocumento5 pagineNew PWM Inverter For Photovoltaic: A Power Generation Systemollata kalanoNessuna valutazione finora
- دايود ريكتفايرDocumento7 pagineدايود ريكتفايرalamryzhra62Nessuna valutazione finora
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- 1 N 4148Documento4 pagine1 N 4148swapnilharalNessuna valutazione finora
- 03 F Space - Vector PDFDocumento10 pagine03 F Space - Vector PDFcelo81Nessuna valutazione finora
- 0Documento12 pagine0celo81Nessuna valutazione finora
- A New Interpretation of The Akagi-Nabae PowerDocumento5 pagineA New Interpretation of The Akagi-Nabae Powercelo81Nessuna valutazione finora
- 1 N 4148Documento4 pagine1 N 4148swapnilharalNessuna valutazione finora
- A New Method For Determining Reference CompensatingDocumento3 pagineA New Method For Determining Reference Compensatingcelo81Nessuna valutazione finora
- Sensor de Corriente Acs712Documento12 pagineSensor de Corriente Acs712masterpiano36Nessuna valutazione finora
- Tidu 404Documento45 pagineTidu 404celo81Nessuna valutazione finora
- Aside From Being Portable, A Solar-Powered Phone Charger Is As Efficient As The Wall Phone ChargerDocumento36 pagineAside From Being Portable, A Solar-Powered Phone Charger Is As Efficient As The Wall Phone Chargercelo81Nessuna valutazione finora
- Solar MPPTDocumento16 pagineSolar MPPTKiran ZoroNessuna valutazione finora
- RefDocumento1 paginaRefcelo81Nessuna valutazione finora
- Top 07219429Documento8 pagineTop 07219429celo81Nessuna valutazione finora
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseDocumento6 pagineDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81Nessuna valutazione finora
- DB3 DB4 SMDB3 - Diac PDFDocumento6 pagineDB3 DB4 SMDB3 - Diac PDFmsicoie1851Nessuna valutazione finora
- SG5841Documento15 pagineSG5841celo81Nessuna valutazione finora
- An 8014Documento18 pagineAn 8014celo81Nessuna valutazione finora
- Improve Two-Phase Buck Converter Performance With A Coupled-Choke Topology - Application Note - Maxim PDFDocumento11 pagineImprove Two-Phase Buck Converter Performance With A Coupled-Choke Topology - Application Note - Maxim PDFcelo81Nessuna valutazione finora
- The Zener DiodeDocumento7 pagineThe Zener Diodecelo81Nessuna valutazione finora
- A Fresh Perspective On Matrix ConvertersDocumento3 pagineA Fresh Perspective On Matrix Converterscelo81Nessuna valutazione finora
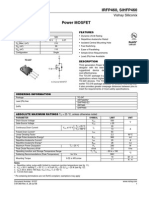
- Irfp460, Sihfp460: Vishay SiliconixDocumento9 pagineIrfp460, Sihfp460: Vishay Siliconixcelo81Nessuna valutazione finora
- New Text Old Text New Textold Text: A Note With A Large Font Size. A Note With A Large Font SizeDocumento2 pagineNew Text Old Text New Textold Text: A Note With A Large Font Size. A Note With A Large Font Sizecelo81Nessuna valutazione finora
- Index: Web Space - Website Hosting - Business Hosting - Free Website Submission - Shopping Cart - PHP HostingDocumento12 pagineIndex: Web Space - Website Hosting - Business Hosting - Free Website Submission - Shopping Cart - PHP Hostingcelo81Nessuna valutazione finora
- Y1 AppnoteDocumento8 pagineY1 Appnotecelo81Nessuna valutazione finora
- RefDocumento1 paginaRefcelo81Nessuna valutazione finora
- RefDocumento1 paginaRefcelo81Nessuna valutazione finora
- RefDocumento1 paginaRefcelo81Nessuna valutazione finora
- InglêsDocumento1 paginaInglêscelo81Nessuna valutazione finora
- 00707032Documento6 pagine00707032celo81Nessuna valutazione finora
- Priorities For Access To HealthDocumento25 paginePriorities For Access To HealthsvpadillaNessuna valutazione finora
- Atlas Bradford (Ver03-Apr05)Documento8 pagineAtlas Bradford (Ver03-Apr05)Gabriel IbarraNessuna valutazione finora
- BOQ Gas PipingDocumento2 pagineBOQ Gas PipingAbu ZakaNessuna valutazione finora
- 90 61 085 Transportation ValvesDocumento18 pagine90 61 085 Transportation ValvesarrikanNessuna valutazione finora
- Hydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BDocumento24 pagineHydraulic Vehicle Lift ST List of Parts and Appendices Stertil B.V BOvidiu PopaNessuna valutazione finora
- Epicor ERP Embedded Courses A4 FS ENSDocumento2 pagineEpicor ERP Embedded Courses A4 FS ENSHuong NguyenNessuna valutazione finora
- Ra CocnatsDocumento13 pagineRa CocnatsloyioNessuna valutazione finora
- Installation Operation Maintenance 7200CB en USDocumento140 pagineInstallation Operation Maintenance 7200CB en USEleno RibeiroNessuna valutazione finora
- Felkoder Jeep Grand Cherokee 1993Documento41 pagineFelkoder Jeep Grand Cherokee 19931LEFFENessuna valutazione finora
- Patrick Bernard Resume 2018 ExecutiveDocumento3 paginePatrick Bernard Resume 2018 ExecutivePatrick BernardNessuna valutazione finora
- Strategic Management: Internal AssessmentDocumento33 pagineStrategic Management: Internal AssessmentSAEID RAHMAN100% (1)
- VLSI Design FlowDocumento20 pagineVLSI Design FlowPranav DarganNessuna valutazione finora
- Supervisory Setpoint Control (SSC) : I/A Series SystemDocumento46 pagineSupervisory Setpoint Control (SSC) : I/A Series SystemMiguel Angel GiménezNessuna valutazione finora
- Grant Guidelines: Background InformationDocumento10 pagineGrant Guidelines: Background Informationmth29Nessuna valutazione finora
- ABB REL5xx RIOConverterDocumento10 pagineABB REL5xx RIOConverterzinab90100% (1)
- Fuel & Ignition System Engine VolvoDocumento1 paginaFuel & Ignition System Engine VolvoImran MehboobNessuna valutazione finora
- SIWES Report by Bonjoru FelixDocumento48 pagineSIWES Report by Bonjoru FelixPheelix Bonjoru100% (2)
- Manual New AswanDocumento18 pagineManual New AswanmohamedmosallamNessuna valutazione finora
- Ti 59 - A Note On Battery CorrosionDocumento3 pagineTi 59 - A Note On Battery CorrosionLeon ZieglerNessuna valutazione finora
- 19A Time Collection Device Integration Activity Guide PDFDocumento78 pagine19A Time Collection Device Integration Activity Guide PDFAliya AmarNessuna valutazione finora
- 1-Introduction To Process ControlDocumento30 pagine1-Introduction To Process ControlRazif Metta100% (4)
- Harden's Spices Model For Biochemistry in Medical CurriculumDocumento10 pagineHarden's Spices Model For Biochemistry in Medical CurriculumGlobal Research and Development Services100% (1)
- Design and Analysis of Different Orders of Active-Rc Butterworth FilterDocumento124 pagineDesign and Analysis of Different Orders of Active-Rc Butterworth FilterPradeep Kumar Goud NadikudaNessuna valutazione finora
- Operation Manual: Smart-UPS Uninterruptible Power SupplyDocumento18 pagineOperation Manual: Smart-UPS Uninterruptible Power SupplyHafeez AhmadNessuna valutazione finora
- C ElanchezhianDocumento8 pagineC ElanchezhiankeshavuvceNessuna valutazione finora
- Lec 2 - Tall Building Criteria and Loading-2003Documento30 pagineLec 2 - Tall Building Criteria and Loading-2003JibonGhoshPritomNessuna valutazione finora
- Server and Workstation AdministrationDocumento454 pagineServer and Workstation AdministrationScott CarneyNessuna valutazione finora
- Colorado Brand GuidelinesDocumento63 pagineColorado Brand GuidelineszpweeksNessuna valutazione finora
- Serie: Guía RápidaDocumento12 pagineSerie: Guía RápidalumapueNessuna valutazione finora
- Blender 04Documento38 pagineBlender 04Ana Maria100% (1)