Potrebbero piacerti anche
- SimulacionDocumento11 pagineSimulacionGerardo MonteroNessuna valutazione finora
- Sistemas SubactuadosDocumento7 pagineSistemas SubactuadosSandoval DanielNessuna valutazione finora
- Controldigital-Libro de TextoDocumento21 pagineControldigital-Libro de TextoNate River0% (1)
- Ejercicios ResueltosDocumento14 pagineEjercicios Resueltosvlady120489Nessuna valutazione finora
- El Esquema Del Control P Es El SiguienteDocumento3 pagineEl Esquema Del Control P Es El SiguienteYudi NatumiNessuna valutazione finora
- Reporte Practica 1Documento11 pagineReporte Practica 1gabrielNessuna valutazione finora
- Robot XYDocumento6 pagineRobot XYFrediSotoNessuna valutazione finora
- Matriz JacobianaDocumento5 pagineMatriz JacobianaCesar Araujo VelizNessuna valutazione finora
- Anteproyecto ScaraDocumento28 pagineAnteproyecto Scaracarlos lagoNessuna valutazione finora
- Reporte de Práctica 1 - Robotica - Componentes de Un RobotDocumento21 pagineReporte de Práctica 1 - Robotica - Componentes de Un RobotAlex VargasNessuna valutazione finora
- Modelo Dinamico de Un Robot de 3gdlDocumento36 pagineModelo Dinamico de Un Robot de 3gdlRamón TovarNessuna valutazione finora
- Proyecto Final ModeladoDocumento4 pagineProyecto Final ModeladoedwcaranNessuna valutazione finora
- Encoder de Velocidad Practica 2Documento8 pagineEncoder de Velocidad Practica 2Daniel Alejandro SandovalNessuna valutazione finora
- Matriz JacobianaDocumento30 pagineMatriz JacobianaChristy NelsonNessuna valutazione finora
- Control Cinemática de VelocidadDocumento20 pagineControl Cinemática de VelocidadJose Maximo Alvarado OyolaNessuna valutazione finora
- Modelado de Un Motor de DC.Documento3 pagineModelado de Un Motor de DC.Carlos Andrés Pérez Ramírez100% (1)
- Sistemas y Transformada ZDocumento14 pagineSistemas y Transformada ZJose CabusNessuna valutazione finora
- MATLAB - SIMULINK Manual - Motor - CCDocumento7 pagineMATLAB - SIMULINK Manual - Motor - CCJuan AndresNessuna valutazione finora
- Matrices de Transformación HomogéneaDocumento17 pagineMatrices de Transformación HomogéneaJhonatan Kevin OrozaNessuna valutazione finora
- Reporte de SimulaciónDocumento11 pagineReporte de SimulaciónIngGuillermoVenturaNessuna valutazione finora
- Modeladoy SimulacionDocumento36 pagineModeladoy Simulacionanblor71Nessuna valutazione finora
- PWM Control de MotorDocumento4 paginePWM Control de MotorBrandon Rodriguez AcuñaNessuna valutazione finora
- Sintonización PIDDocumento6 pagineSintonización PIDAdrian Vera RozoNessuna valutazione finora
- 06 - Error en Estado Estable o Estacionario ELT PDFDocumento11 pagine06 - Error en Estado Estable o Estacionario ELT PDFeveiroNessuna valutazione finora
- Prepráctica Control Bola VigaDocumento10 paginePrepráctica Control Bola VigaDaniel GuillernaNessuna valutazione finora
- Función de TransferenciaDocumento5 pagineFunción de TransferenciaJose EkNessuna valutazione finora
- 14 y 15 Analisis Del Controlador PID y Repaso LGR BODEDocumento85 pagine14 y 15 Analisis Del Controlador PID y Repaso LGR BODEMIJAELNessuna valutazione finora
- Estabilidad Jury PDFDocumento1 paginaEstabilidad Jury PDFJYEINER MANUEL LAMUS RAMIREZNessuna valutazione finora
- Modelo Dinamico ActuadoresDocumento8 pagineModelo Dinamico ActuadoresJosue QuinteroNessuna valutazione finora
- Error en Estado EstacionarioDocumento18 pagineError en Estado EstacionarioDaniela CruzNessuna valutazione finora
- Practica 1Documento6 paginePractica 1Adrian Manuel Lopez AlmejoNessuna valutazione finora
- Informe Control Robusto II - NewDocumento21 pagineInforme Control Robusto II - NewCarmen Rosa Amau Quispe0% (1)
- Historia, Tipos y Grados de Libertad de Un RobotDocumento4 pagineHistoria, Tipos y Grados de Libertad de Un RobotMike MoralesNessuna valutazione finora
- Meneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaDocumento100 pagineMeneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaAdrianaBenavides100% (1)
- 07 Dinamica Espacio de La TareaDocumento10 pagine07 Dinamica Espacio de La TareaRYANessuna valutazione finora
- Sistemas Continuos PDFDocumento25 pagineSistemas Continuos PDFGuyumusNessuna valutazione finora
- Control de Un Motor DC Mediante Realimentación de EstadosDocumento2 pagineControl de Un Motor DC Mediante Realimentación de EstadosAndres AndradeNessuna valutazione finora
- Modelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilDocumento6 pagineModelado, Control y Simulación de Un Sistema Péndulo Invertido Sobre Base MóvilMiguel Sanchez BravoNessuna valutazione finora
- Practica#7Documento10 paginePractica#7Alexiz CuNessuna valutazione finora
- Toolbox de RobóticaDocumento8 pagineToolbox de RobóticaSergio SorucoNessuna valutazione finora
- Proyecto MoscosoDocumento2 pagineProyecto MoscosoDiego FloresNessuna valutazione finora
- Informe #7Documento6 pagineInforme #7KevinNessuna valutazione finora
- Informe #2 ControlDocumento4 pagineInforme #2 ControlDanielRuizNessuna valutazione finora
- DIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaDocumento16 pagineDIseño de Controladores Discreto Utilizando El Metodo de FrecuenciaAdrián AntonioNessuna valutazione finora
- AUTOMÁTICADocumento31 pagineAUTOMÁTICAMarga RamirezNessuna valutazione finora
- Practica #1 Laboratorio de Automatizacion y Robotica.Documento6 paginePractica #1 Laboratorio de Automatizacion y Robotica.Irving Zahir Anadón López100% (1)
- Lab6 Linealizacion y Punto de OperacionDocumento6 pagineLab6 Linealizacion y Punto de OperacionJohan Adrian Arcos SantacruzNessuna valutazione finora
- Analisis de Un Robot Manipulador Scara ARTICULODocumento22 pagineAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Nessuna valutazione finora
- Control Unidad 01Documento75 pagineControl Unidad 01arturoNessuna valutazione finora
- Pid Ziegler NicholsDocumento5 paginePid Ziegler NicholsSebastian Felipe RodriguezNessuna valutazione finora
- REPORTE Convertidores CCDocumento7 pagineREPORTE Convertidores CCSamuel Beltran C0% (1)
- Método de Asignación de Polos y Regulador LinealDocumento13 pagineMétodo de Asignación de Polos y Regulador LinealJosé Rubén Quitl RomeroNessuna valutazione finora
- Diseño de Un Robot CuadrupedoDocumento85 pagineDiseño de Un Robot CuadrupedoJose CordovaNessuna valutazione finora
- Controles DiscretosDocumento4 pagineControles DiscretosOswaldo Mejias50% (2)
- 2011 TP2 - LQR DiscretoDocumento7 pagine2011 TP2 - LQR Discretosebastian nasiNessuna valutazione finora
- Unit 2 - Clasificacion Por Estructura PLCDocumento26 pagineUnit 2 - Clasificacion Por Estructura PLCJaret GarciaNessuna valutazione finora
- Nociones de Control RobustoDocumento21 pagineNociones de Control RobustoRenzo Zuñiga CastilloNessuna valutazione finora
- ApuntesDocumento70 pagineApuntesJennifer SmallNessuna valutazione finora
- Modelado Sistemas HibridosDocumento6 pagineModelado Sistemas HibridosSuray RezaNessuna valutazione finora
- 6.sistemas de ControlDocumento10 pagine6.sistemas de ControlEd BrauNessuna valutazione finora
- Mecatrónica: modelado, simulación y control de sistemas físicosDa EverandMecatrónica: modelado, simulación y control de sistemas físicosNessuna valutazione finora
- 10 PMI ComunicacionDocumento35 pagine10 PMI Comunicacionvlady120489Nessuna valutazione finora
- SD750 HW EspDocumento92 pagineSD750 HW Espvlady120489Nessuna valutazione finora
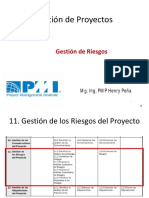
- 11 PMI Riesgos PDFDocumento80 pagine11 PMI Riesgos PDFvlady120489Nessuna valutazione finora
- SD75MTSW01JE v8.1.0 EspDocumento132 pagineSD75MTSW01JE v8.1.0 Espvlady120489Nessuna valutazione finora
- Manual Emax2 PDFDocumento306 pagineManual Emax2 PDFvlady120489Nessuna valutazione finora
- 1.2 Aplicaciones de Las EcuacionesDocumento17 pagine1.2 Aplicaciones de Las EcuacionesSaban D. CristianNessuna valutazione finora
- GuíaExBachExamenAdmision ESDocumento12 pagineGuíaExBachExamenAdmision EScesaga0075102Nessuna valutazione finora
- Geometria Tema 3 Sistema Virtual de Educacion EvaluacionesDocumento7 pagineGeometria Tema 3 Sistema Virtual de Educacion EvaluacionesANDERSON DAVID CANDO QUISHPENessuna valutazione finora
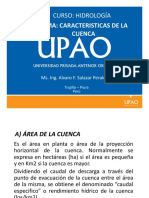
- Tema: Caracteristicas de La Cuenca Curso: Hidrología: Ms. Ing. Alvaro F. Salazar PeralesDocumento29 pagineTema: Caracteristicas de La Cuenca Curso: Hidrología: Ms. Ing. Alvaro F. Salazar PeralesLuis La Rosa DeqoreNessuna valutazione finora
- Consulta de Métodos de Particionado y RasgadoDocumento2 pagineConsulta de Métodos de Particionado y RasgadoDanilo SolanoNessuna valutazione finora
- La Composicion FotograficaDocumento30 pagineLa Composicion FotograficaLEIDY KATHERINE ESPARZA SERRANONessuna valutazione finora
- Cartilla de Evaluacion QuintoDocumento2 pagineCartilla de Evaluacion QuintoMustafat DanielNessuna valutazione finora
- Reporte de Laboratorio 2 - Grupo 8 PDFDocumento10 pagineReporte de Laboratorio 2 - Grupo 8 PDFJuan Andres Gonzalez AriasNessuna valutazione finora
- Codigo BCDDocumento16 pagineCodigo BCDCristian Valladares CarreraNessuna valutazione finora
- Examen Extraordinario SECUNDARIA 2Documento9 pagineExamen Extraordinario SECUNDARIA 2MoUx NeryNessuna valutazione finora
- Solucion de Sistemas Lineales Por EliminacionDocumento7 pagineSolucion de Sistemas Lineales Por Eliminacioncinthia chissela diaz vegaNessuna valutazione finora
- 2A Set de Ejercicios - Mov - en Linea RectaDocumento2 pagine2A Set de Ejercicios - Mov - en Linea RectaUnTipoRaroMas :0Nessuna valutazione finora
- Inf. para Expo FugkDocumento15 pagineInf. para Expo FugkAnahi MontielNessuna valutazione finora
- Álgebra de Diagrama de Bloques.Documento43 pagineÁlgebra de Diagrama de Bloques.Daniel Felipe Ardila Guerrero100% (1)
- 19 Descargar Ficha de Conjuntos Cuarto de SecundariaDocumento17 pagine19 Descargar Ficha de Conjuntos Cuarto de Secundariajulio100% (1)
- Función Polilogarítmica - Wikipedia, La Enciclopedia Libre PDFDocumento44 pagineFunción Polilogarítmica - Wikipedia, La Enciclopedia Libre PDFJoseNessuna valutazione finora
- La CélulaDocumento6 pagineLa CélulaVíctor ViloriaNessuna valutazione finora
- Graficos Estadisticos XS0276Documento46 pagineGraficos Estadisticos XS0276TraderCr TradeCr100% (1)
- TeseladosDocumento46 pagineTeseladosClara Rosa Vega AstorgaNessuna valutazione finora
- Estructuras ComplementariasDocumento16 pagineEstructuras ComplementariasPedro Pablo Valdera Damian100% (1)
- Tarea de Libro de Lectura para 3º Eso Matemáticas Aplicadas PDFDocumento6 pagineTarea de Libro de Lectura para 3º Eso Matemáticas Aplicadas PDFSilvia CBNessuna valutazione finora
- TEMAS y LOGROS KAROLLDocumento7 pagineTEMAS y LOGROS KAROLLEusebio MarquezNessuna valutazione finora
- Cómo Restar FechasDocumento1 paginaCómo Restar FechasEsteban Sándiga GrandaNessuna valutazione finora
- Filosofar Científicamente y Encarar La Ciencia FilosóficamenteDocumento2 pagineFilosofar Científicamente y Encarar La Ciencia FilosóficamenteMarianita Romero100% (1)
- Lab 2 Humedad, Cuarteo y GranulometríaDocumento9 pagineLab 2 Humedad, Cuarteo y GranulometríaPamela Rayen Rifo CancinoNessuna valutazione finora
- 05 - PolígonosDocumento32 pagine05 - Polígonosdr Roman Pineda MoralesNessuna valutazione finora
- BERNOULLIDocumento10 pagineBERNOULLImoises aparicioNessuna valutazione finora
- BIBP1 U1 ContenidoDocumento102 pagineBIBP1 U1 Contenidohugo ortegaNessuna valutazione finora
- S17 CuvDocumento28 pagineS17 CuvFarid Brenis VásquezNessuna valutazione finora
- Trabajo Practico N1 Bunge, Segunda EntregaDocumento2 pagineTrabajo Practico N1 Bunge, Segunda EntregaAlicia RosalesNessuna valutazione finora