IOSR Journal of Engineering (IOSRJEN)
ISSN (e): 2250-3021, ISSN (p): 2278-8719
Vol. 05, Issue 07 (July. 2015), ||V2|| PP 50-55
www.iosrjen.org
Dual Redundancy Can-Bus Controller Design
Gujjula Swathi, B.Glory Grace Nissy
M.Tech scholar at Prasad engineering college, Telangana, India
Assistant Professor, Dept. of ECE, Prasad Engineering Shameerpet, jangaon,warangal district, College,
Jangaon, India.
Abstract: - At present, the technique of dual redundancy CAN-bus is mainly implemented by software, so that it
has the disadvantages of low reliability and bad real-time performance. Built on the error handling rule in CAN
specification version 2.0, a hardware redundancy management unit is creatively put forward in this paper.
Based on FPGA, a kind of customized Dual Redundancy CAN-bus Controller (DRCC) is designed. By
downloading the IP Core into a XILINXs SPARTAN-3 chip to test, it has been verified that the design could
completely meet the requirement for high real-time performance and reliability, with a bright prospect for the
future.
Keywords: - Dual Redundancy CAN-bus; Verilog; FPGA; IP Core
I.
INTRODUCTION
With the development of EDA (Electronic Design Automation), digital system designed by FPGA is
widely used in all kinds of fields [1] such as communication, aerospace, medical treatments and industrial
control system [7]. CAN (Controller Area Network) has become one of the most popular data bus [2] with
characteristics such as anti-interference capability, much lower cost and easy maintenance. There are a great
number of CAN chips in market for example PHILIPS SJA1000 [3]. No matter how perfect the single-channel
CAN bus network is, while something happens to the single-channel bus network such as short circuit or open
circuit, the whole network wont work. To solve this problem, some concepts of redundancy were put forward
in the past. To sum up, there are three kinds of means of redundancy data bus [4, 6, 8, 9, 10]. The first is
redundancy of bus driver, which employs one CPU, one CAN controller and two bus drivers. The second is
redundancy of bus controller, which employs one CPU, two CAN controllers and two bus drivers. The last is
redundancy of software system, which employs two CPUs, two CAN controllers and two bus drivers. But those
redundancy means is done by software running in the CPU which has the disadvantages of low reliability and
bad real-time performance [14, 17, 18]. So the best redundancy means is that redundancy management is done
by hardware logic circuit. But a CAN controller chip is usually a whole component whose function cannot be
modified. Thus, a Dual Redundancy CAN-bus Controller (DRCC) based on FPGA chip, a programmable
logic component, is put forward in this paper.
II.
DUAL REDUNDANCY CAN-BUS (DRC) NETWORK ARCHITECTURE
The DRC Network architecture is shown in Fig.1. Compared with physical layer of a single-bus CAN
network, physical layer of the DRC Network is added an additional channel. In single-bus CAN network, if its
only channel is severely interfered or open, the Network will be corrupted. But the DRC Networks physical
layer has two completely independent channels, which are Channel 1 and Channel 2 respectively. If the
redundancy management fails to transmit message from one channel, it will transmit the message automatically
from the other channel.
III.
DUAL REDUNDANCY CAN-BUS CONTROLLER DESIGN
A. DRCC Structure
The block diagram of DRCC is shown in Fig.2. DRCC is composed of two Bit Stream Processor
Blocks (BSPB), one Redundancy Management Block (RMB) and two RAM Blocks. The BSPB includes one
state-machine and one Bit Timing Logic Block (BTLB).
The function of several blocks RI DRCC can be described as follows:
BTLB [12] monitors the serial CAN-bus line, manages the bus line-related bit timing, does hard
synchronization and re- synchronization, compensates for the propagation delay times and controls the sample
point and the number of samples to be taken within a bit time.
BSPB takes charge of Date Link Layer protocol and manages CAN Message such as recognizing and handling
standard frame and extended frame, managing FIFO and filtering Message etc.
International organization of Scientific Research
50 | P a g e
Dual Redundancy Can-Bus Controller Design
Fig. 1. DRC network architecture
Fig. 2. Dual Redundancy CAN-bus Controller Block Diagram
Fig. 3. State transition diagram
RMB manages transmission of CAN Messages while DRCC runs in redundancy mode, and it
doesnt work while DRCC runs in normal mode. The block consists of include some glue logic and three statemachines which a main state- machine and two auxiliary state-machines. The main state- machine manages
channels switch, latches bits of the time counter when finishing sending message or switching channels and
the two auxiliary state-machines monitor whether a channel is valid and report its state to the main statemachine.
Two RAMs are used to buffer messages waiting for being
transmitted, to buffer received messages and to register all kinds of states which DRCC runs.
B. Redundancy management state-machine
The RMB includes three state-machines, a main state- machine and two auxiliary state-machines. The state
transition diagram of main state-machine is shown in Fig.3 and its each state is described in Table 1.
International organization of Scientific Research
51 | P a g e
Dual Redundancy Can-Bus Controller Design
IV.
DRCC SIMULATION TEST
Among these tests, the DRCC IP core [13] is used as a component as if it was a chip in a Printed
Circuit Board (PCB). Block diagram of the test system is shown in Fig.4. Task of the test program includes
computing the expected timing of DRCC interface, writing read/write function and writing test bench [15,
16].
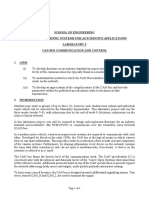
A. Transmission error count and transmission process
Simulation results of the relationship between transmission error count and transmission process are shown in
Fig.5.
As shown in Fig.5, while transmitting signal is HIGH, a message is in the process of transmission. The signal
bus of tx_err_cnt[7:0] is a indicator of transmission error counter, which will increase by 8 per transmission
failure. While transmission error counter is more than 80Hex, the transmitting message of Channel1 is aborted.
B. Transmission error count and error passive activation
The results of simulation of a relationship between transmission error count and error passive activation is
shown in Fig.6.
While transmission error counter (chan_a_bsp_tx_err_cnt[8:0]) is greater than 80Hex, the signal of ERROR
PASSIVE (chan_a_bsp_node_error_passive) is activated. In redundancy mode, the state-machine will start the
process of switching channel.
C. Switching channels
The results of simulation of switching channels are shown in Fig.7.
1) Step 1:
When chan_a_transmission_req is sampled HIGH during a clock cycle, the state-machine starts transmission of
a message from Channel 1. Due to acknowledgement error, the message fails to be transmitted from Channel 1
and this leads to increase transmission error counter (chan_a_bsp_tx_err_cnt). According to the rule in CAN
specification version 2.0, the corrupted message is automatically retransmitting as soon as the bus is idle again
[5]. This means that the corrupted message is repeatedly transmitted until success or ERROR PASSIVE
activation. As a consequence, transmission error counter continues to increase.
International organization of Scientific Research
52 | P a g e
Dual Redundancy Can-Bus Controller Design
2) Step 2:
When transmission error counter is greater than 80Hex, the signal of ERROR PASSIVE
(chan_a_bsp_node_error_passive) is activated. This indicates that Channel 1 is severely corrupted.
3) Step 3:
In this phase, switching channel and request for transmitting the message from Channel 2 are done.
When the state-machine sets tx_channel to HIGH, current channel has been connected to Channel 2. When the
state-machine sets chan_b_transmission_req to HIGH, it requests to transmit the message from Channel 2.
Fig. 5. Counter and process
Fig. 6. Counter and error passive
Fig. 7. Switching channels
International organization of Scientific Research
53 | P a g e
Dual Redundancy Can-Bus Controller Design
Fig. 8. channel switching time
4) Step 3:
In this phase, switching channel and request for transmitting the message from Channel 2 are done. When the
state-machine sets tx_channel to HIGH, current channel has been connected to Channel 2. When the statemachine sets chan_b_transmission_req to HIGH, it requests to transmit the message from Channel 2.
5) Step 4:
signal of transmission_ack. When the message is successfully transmitted, the state-machine sets the signal to a
clock period.
6) Step 5:
signal of tx_sucess. When the message is successfully transmitted, the state-machine sets the signal to a clock
period.
D. Channel switching time
As shown in Fig.8, during 25ms or so, Channel 1 (node1_tx1_i) transmitted repeatedly a message but did not
success. This leaded to ERROR PASSIVE activation and then the same message is switched to Channel 2
to transmit. Channel 2 (node1_tx2_i) completes successfully transmission only once. So, Channel switching
time needs 25ms or so under the acknowledge error circumstance.
V.
CONCLUSIONS
The DRCC IP Core, which is written by synthesizable, behavioral Verilog language, can be used as a
component in a project and it must have had a bright prospect for the future. By downloading the IP Core into a
XILINXs SPARTAN-3 chip [11] to test, the design of Dual Redundancy CAN-bus Controller Based on FPGA
is successful. It guarantees reliability and real-time performance and compensates for the disadvantage of
software redundancy.
VI.
ACKNOWLEDGMENT
We would like to give thanks to Professor Min Zijian for his help in the test and analysis of the IP Core.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Ma Xiaojun, Tong Jiarong, Design and Implementation of A New FPGA Architecture, ASIC, 20
03. Proceedings. 5th International Conference, Vol.2, pp.816-819, October 2003.
Yu Zhu, Can and FPGA Communication Engineering: Implementation of a Can Bus Based
Measurement System on an Fpga Development Kit, Diplomica Verlag, 2010.
Philips Semiconductors. SJA1000 Standalone CAN controller. January 2000.
Qing Jia, DeviceNet media redundancyiCC 2005.
Robert Bosch GmbH, CAN Specification Version 2.0, September 1991.
Jose Rufino, Dual-Media Redundancy Mechanisms for CAN, Technical Report, January 1997.
CiA - CAN in Automation. CAN Physical Layer for Industrial Applications - CiA/DS1021, April 1994.
International organization of Scientific Research
54 | P a g e
Dual Redundancy Can-Bus Controller Design
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
C. Mateus, Design and implementation of a non-stop Ethernet with a redundant
Project Final Report, Instituto Superior Tecnico, Lisboa, Portugal, September 1993. (in portuguese).
Han Ju, Ke Jing, Jin Jiang, A kind of CAN bus redundancy method,Electronics Process
Technology(China), Vol.19, No.4, 1999.
Yu ChunLai, Xu HuaLong, Liu GengWang, Hou XiaoLing, Research of the Redundant Methods of CAN
, Measurement & Control Technology(China), Vol.22, No.10, 2003.
Xilinx Inc, Spartan3 FPGA Family: Complete Data Sheet, May 2007. [12] I. Mohor, CAN Core, www.opencores.org.
Jane Smith, Verilog Coding Guidelines, Cisco Systems, Inc.
M.A. Livani, J. Kaiser, and W.J. Jia, Scheduling hard and soft realtime communication in CAN, In Proc. of the 23rd.Workshop on RealTime Programming, Shantou, China, June 1998. IFAC/IFIP.
Lattice Semiconductor Corporation, A Verilog HDL Test Bench Primer: Application Note.
Abhishek Shetty, Hamid Mahmoodi, System Verilog Testbench Tutorial, NanoElectronics & Computing Research Center School of Engineering San Francisco State University S
an Francisco, C'A Fall 2011.
S. Punnekkat, H. Hansson, and C. Norstrom, Response time analysis under errors for CAN,
Proceedings of the IEEE Real-Time Technology and Applications Symposium, pp. 258-265,
Washington, USA, May 2000.
Robert I. Davis, Alan Burns, Controller Area Network (CAN) Schedulability Analysis.
International organization of Scientific Research
55 | P a g e
Potrebbero piacerti anche
- Huawei Training GuideDocumento5 pagineHuawei Training GuidediporufaiNessuna valutazione finora
- LTE Cheat SheetDocumento11 pagineLTE Cheat SheetAqeel HasanNessuna valutazione finora
- Fuzzy Explicit Window Adaptation: A Method To Further Enhance TCP Performance Michael Savori CDocumento33 pagineFuzzy Explicit Window Adaptation: A Method To Further Enhance TCP Performance Michael Savori Ckjtten87Nessuna valutazione finora
- EEET2394 Laboratory 3 Online v2Documento4 pagineEEET2394 Laboratory 3 Online v2URS FreelancingNessuna valutazione finora
- CS60003 High Performance Computer ArchitectureDocumento3 pagineCS60003 High Performance Computer ArchitectureNarayan KunalNessuna valutazione finora
- Lab2 MotorControl 08Documento18 pagineLab2 MotorControl 08ĐạiDương100% (1)
- Multi-Motor Control System Design Based On Can BusDocumento4 pagineMulti-Motor Control System Design Based On Can BusPrakash ArulNessuna valutazione finora
- Intelligent Breaking SystemDocumento21 pagineIntelligent Breaking SystemMurugan MNessuna valutazione finora
- Kazuo Sakiyama, Elke de Mulder, Bart Preneel and Ingrid VerbauwhedeDocumento4 pagineKazuo Sakiyama, Elke de Mulder, Bart Preneel and Ingrid VerbauwhedesuidhiNessuna valutazione finora
- BSCDocumento120 pagineBSCOsama Abbass100% (2)
- Improvingtcp Performance Over 3G Links by Optimizing RLC ParametersDocumento6 pagineImprovingtcp Performance Over 3G Links by Optimizing RLC ParametersAmitKumarNessuna valutazione finora
- CAN Bus in PSoC Report210Documento16 pagineCAN Bus in PSoC Report210Marcos Antonio EstremoteNessuna valutazione finora
- 1.0 Functional Description (FN) 3Documento98 pagine1.0 Functional Description (FN) 3Ender ÇulhaNessuna valutazione finora
- Harq For Wcdma Enhanced Uplink: Link Level Performance in ShoDocumento5 pagineHarq For Wcdma Enhanced Uplink: Link Level Performance in ShoLorne SwainNessuna valutazione finora
- A Comparison of Techniques For Improving TCP Performance Over Wireless LinksDocumento4 pagineA Comparison of Techniques For Improving TCP Performance Over Wireless LinksMuthu Vijay DeepakNessuna valutazione finora
- CAN Bus NeuralDocumento6 pagineCAN Bus Neuraltssskk1976Nessuna valutazione finora
- 3G UL-DL Capacity Monitoring V1.0Documento55 pagine3G UL-DL Capacity Monitoring V1.0Denmark Wilson100% (1)
- WiMAX Channel Simulation Uni ReportDocumento5 pagineWiMAX Channel Simulation Uni Reportandygray119Nessuna valutazione finora
- ApbDocumento7 pagineApbdebashispaul_cnNessuna valutazione finora
- Lazy-Cseq 2.0: Combining Lazy Sequentialization With Abstract InterpretationDocumento5 pagineLazy-Cseq 2.0: Combining Lazy Sequentialization With Abstract InterpretationGeorgeNessuna valutazione finora
- Design and Analysis of A 32-Bit Pipelined Mips Risc ProcessorDocumento18 pagineDesign and Analysis of A 32-Bit Pipelined Mips Risc ProcessorAnonymous e4UpOQEPNessuna valutazione finora
- Infineon-Component Controller Area Network V2.10-Software Module Datasheets-V03 00-EnDocumento40 pagineInfineon-Component Controller Area Network V2.10-Software Module Datasheets-V03 00-Ensmitianraj2005Nessuna valutazione finora
- PM89563 - Enhanced Layer 2 For Uplink - Feature Assessment ORF FOA - May 2014 - V1Documento44 paginePM89563 - Enhanced Layer 2 For Uplink - Feature Assessment ORF FOA - May 2014 - V1syedNessuna valutazione finora
- Computer Networks Report - Congestion Control Algorithms TCP CUBIC & CUBIC-FITDocumento14 pagineComputer Networks Report - Congestion Control Algorithms TCP CUBIC & CUBIC-FITPratham JainNessuna valutazione finora
- Design & Verification of AMBA APB ProtocolDocumento4 pagineDesign & Verification of AMBA APB ProtocolKrishnajithKjNessuna valutazione finora
- Remote Control ManualDocumento300 pagineRemote Control ManuallevaneasNessuna valutazione finora
- Design and Research of CNC Platform Based On CAN BusDocumento5 pagineDesign and Research of CNC Platform Based On CAN BusInternational Journal of Research in Engineering and ScienceNessuna valutazione finora
- Ijert Ijert: Green House Parameters Monitoring Using Can Bus and System On ChipDocumento4 pagineIjert Ijert: Green House Parameters Monitoring Using Can Bus and System On ChipMani SekarNessuna valutazione finora
- Roke LTE eNodeB MAC Scheduler InterfaceDocumento6 pagineRoke LTE eNodeB MAC Scheduler Interfaceevil_dragonNessuna valutazione finora
- Carrier AggregationDocumento19 pagineCarrier AggregationSunil Kumar100% (2)
- Base Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. ScafiDocumento5 pagineBase Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. Scafikokome35Nessuna valutazione finora
- Prediction Router: Yet Another Low Latency On-Chip Router ArchitectureDocumento12 paginePrediction Router: Yet Another Low Latency On-Chip Router ArchitectureChih Hsun ChouNessuna valutazione finora
- Downtilts To Improve SINR and Reduce OvershootingDocumento5 pagineDowntilts To Improve SINR and Reduce OvershootingEltayeb Abdalla HamodaNessuna valutazione finora
- Communication of Cluster Using Can Bus - CSL - csl-201902-0010Documento6 pagineCommunication of Cluster Using Can Bus - CSL - csl-201902-0010Qui PhuNessuna valutazione finora
- HS DSCH WP 04Documento10 pagineHS DSCH WP 04api-3743621Nessuna valutazione finora
- Fault Tolerant Protocol For CAN Flash ProgrammingDocumento6 pagineFault Tolerant Protocol For CAN Flash Programmingsudhakar417Nessuna valutazione finora
- Design and Implement of QPSK Modem Based On FPGADocumento3 pagineDesign and Implement of QPSK Modem Based On FPGAAnil PatilNessuna valutazione finora
- Study On Admitted CE Congestion On RNC SidexDocumento8 pagineStudy On Admitted CE Congestion On RNC SidexAnil KhuranaNessuna valutazione finora
- Hsupa (1) Principles of Hsupa 20070328 A 1.0Documento57 pagineHsupa (1) Principles of Hsupa 20070328 A 1.0chayhofmesNessuna valutazione finora
- A Jitter Injection Signal Generation and ExtractioDocumento14 pagineA Jitter Injection Signal Generation and Extractioيبسسي سيسيسيNessuna valutazione finora
- TC & BSC OverviewDocumento36 pagineTC & BSC OverviewVarun VarmaNessuna valutazione finora
- NDocumento4 pagineNAzri Mohd Khanil0% (1)
- UVM TLM Enhancement, Multi-Stimulus Port-Paper - FinalDocumento19 pagineUVM TLM Enhancement, Multi-Stimulus Port-Paper - FinalKunal PanchalNessuna valutazione finora
- Implementation With: 170 Mbps (8176, 7156) Quasi-Cyclic LDPC Decoder FpgaDocumento4 pagineImplementation With: 170 Mbps (8176, 7156) Quasi-Cyclic LDPC Decoder FpgaAnonymous uspYoqENessuna valutazione finora
- Simulation Results & Performance Analysis Simulation Results & Performance AnalysisDocumento10 pagineSimulation Results & Performance Analysis Simulation Results & Performance Analysissarin.gaganNessuna valutazione finora
- Microelectronics Journal: Shuo Yang, Jun Cheng, Pei WangDocumento8 pagineMicroelectronics Journal: Shuo Yang, Jun Cheng, Pei WangShylu SamNessuna valutazione finora
- RNT Lte Dim v2.3.6Documento305 pagineRNT Lte Dim v2.3.6蘇菲和尚Nessuna valutazione finora
- RNT Lte Dim v2.3.6Documento305 pagineRNT Lte Dim v2.3.6OsamaAshrafOthman100% (1)
- About DasDocumento2 pagineAbout DasnmurugesanNessuna valutazione finora
- Carrier Aggregation & Dual ConnectivityDocumento5 pagineCarrier Aggregation & Dual ConnectivityIdrisNessuna valutazione finora
- Qos Performance Analysis of Ieee 802.15.4 Mac in Lr-Wpan With Bursty Error ChannelsDocumento5 pagineQos Performance Analysis of Ieee 802.15.4 Mac in Lr-Wpan With Bursty Error ChannelsSaharSaharNessuna valutazione finora
- SIT202 Assignment1Documento3 pagineSIT202 Assignment1Ramana MurugaNessuna valutazione finora
- A Reconfigurable Architecture of A High Performance 32-Bit MAC Unit For Embedded DSPDocumento4 pagineA Reconfigurable Architecture of A High Performance 32-Bit MAC Unit For Embedded DSPCharan MsdNessuna valutazione finora
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFDocumento5 pagineSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargeties0% (1)
- Using Self-Authentication-and-Recovery Images For Error Concealment in Wireless EnvironmentsDocumento8 pagineUsing Self-Authentication-and-Recovery Images For Error Concealment in Wireless EnvironmentsShirishinahal SumanNessuna valutazione finora
- Ijert Ijert: Implementation of Interleaving Switch Based Architecture For System On ChipDocumento7 pagineIjert Ijert: Implementation of Interleaving Switch Based Architecture For System On ChipAkhila ReddyNessuna valutazione finora
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksDa EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksNessuna valutazione finora
- LTE Signaling: Troubleshooting and Performance MeasurementDa EverandLTE Signaling: Troubleshooting and Performance MeasurementNessuna valutazione finora
- MMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelDocumento13 pagineMMSE Adaptive Receiver vs. Rake Receiver Performance Evaluation For UWB Signals Over Multipath Fading ChannelIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Application of The Multi-Curve Reconstruction Technology in Seismic InversionDocumento4 pagineApplication of The Multi-Curve Reconstruction Technology in Seismic InversionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Random Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghDocumento9 pagineRandom Fixed Point Theoremsin Metric Space: Balaji R Wadkar, Ramakant Bhardwaj, Basantkumar SinghIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Introduction To Accounting Professional Judgment ManipulationDocumento3 pagineIntroduction To Accounting Professional Judgment ManipulationIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Effectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteDocumento6 pagineEffectiveness in Addressing The Sustainability and Environmental Issue Involving Use of Coal Ash As Partial Replacement of Cement in ConcreteIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- The Experimental Study On The Compatibility Relationship of Polymer and Oil LayerDocumento5 pagineThe Experimental Study On The Compatibility Relationship of Polymer and Oil LayerIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Study On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldDocumento6 pagineStudy On Logging Interpretation Model and Its Application For Gaotaizi Reservoir of L OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Constructions Quality Versus Bad Components in Jordanian CementDocumento3 pagineConstructions Quality Versus Bad Components in Jordanian CementIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- The Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionDocumento5 pagineThe Identification of Lithologic Traps in Nanpu Sag D3 Member of Gaonan RegionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Construction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuDocumento4 pagineConstruction of Self-Regulated EFL Micro-Course Learning: Zhongwen LiuIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Modeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimDocumento5 pagineModeling and Design of Hybrid Power Plants: Ahmed KH A. E. AlkhezimIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Strength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaDocumento10 pagineStrength Properties of Commercially Produced Clay Bricks in Six Different Locations/ States in NigeriaIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- "Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasDocumento4 pagine"Sign Language Translator": Mr. Sangam Mhatre, Mrs. Siuli DasIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Detecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformDocumento5 pagineDetecting Spammers in Youtube: A Study To Find Spam Content in A Video PlatformIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Assessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)Documento6 pagineAssessment of The Life Quality of Urban Areas Residents (The Case Study of The City of Fahraj)IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- The Research of Source System On Chang 6 Sand Formation in Ansai OilfieldDocumento5 pagineThe Research of Source System On Chang 6 Sand Formation in Ansai OilfieldIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Application of Cloud Transformation Technology in Predicting Reservoir PropertyDocumento4 pagineApplication of Cloud Transformation Technology in Predicting Reservoir PropertyIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Validating The Theories of Urban Crime in The City of RaipurDocumento10 pagineValidating The Theories of Urban Crime in The City of RaipurIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Bose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsDocumento5 pagineBose-Einstein Condensation Controlled by (HOP+OLP) Trapping PotentialsIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Genetic Analysis of Low Resistivity Reservoir: Gang Wang, Kai Shao, Yuxi CuiDocumento3 pagineGenetic Analysis of Low Resistivity Reservoir: Gang Wang, Kai Shao, Yuxi CuiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Characteristic of Cracks in Tight Sandstone Reservoir: Ming Yan Yunfeng Zhang Jie Gao Ji GaoDocumento4 pagineCharacteristic of Cracks in Tight Sandstone Reservoir: Ming Yan Yunfeng Zhang Jie Gao Ji GaoIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Oil and Water Layer Identification by Dual-Frequency Resistivity LoggingDocumento4 pagineOil and Water Layer Identification by Dual-Frequency Resistivity LoggingIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Analysis of Distribution and Effection of Oil-Water: Yue FeiDocumento6 pagineAnalysis of Distribution and Effection of Oil-Water: Yue FeiIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Yingtai Area in Songliao Basin As The Main Layer Tight Oil "Dessert" Reservoir PredictionDocumento4 pagineYingtai Area in Songliao Basin As The Main Layer Tight Oil "Dessert" Reservoir PredictionIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Classification of Fault Condensed Belt and Faults Development Characteristics in Xingbei Region, Daqing PlacanticlineDocumento5 pagineClassification of Fault Condensed Belt and Faults Development Characteristics in Xingbei Region, Daqing PlacanticlineIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Symbolism As A Modernist Featurein A Passage To India: Ahmad Jasim Mohammad, Suhairsaad Al-DeenDocumento4 pagineSymbolism As A Modernist Featurein A Passage To India: Ahmad Jasim Mohammad, Suhairsaad Al-DeenIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNessuna valutazione finora
- Trainer Competency ModelDocumento4 pagineTrainer Competency ModelpattapuNessuna valutazione finora
- Data Analysis Using Lichtman's 3 C'sDocumento2 pagineData Analysis Using Lichtman's 3 C'sLyka Yusay60% (5)
- Stochastic ProgrammingDocumento315 pagineStochastic Programmingfeiying1980100% (1)
- INFO TEMA 2 Populatia Zonei Metropolitane Iasi PDFDocumento17 pagineINFO TEMA 2 Populatia Zonei Metropolitane Iasi PDFLoRe LtkNessuna valutazione finora
- GAIN - Flight Safety HandbookDocumento180 pagineGAIN - Flight Safety HandbookDennis Groves100% (4)
- Them As Foreigners': Theme 2: OtherizationDocumento3 pagineThem As Foreigners': Theme 2: OtherizationNastjaNessuna valutazione finora
- 1960 Mower LearningtheoryDocumento585 pagine1960 Mower Learningtheoryfatty_mvNessuna valutazione finora
- Cyclotron List 2007 - FullDocumento127 pagineCyclotron List 2007 - FullJaswinder SidhuNessuna valutazione finora
- Barriers To Effective CommunicationDocumento20 pagineBarriers To Effective CommunicationGladys Mae GuerreroNessuna valutazione finora
- PAM For Informatica MDM Multidomain Edition 10.1Documento2 paginePAM For Informatica MDM Multidomain Edition 10.1Sourajit MitraNessuna valutazione finora
- Mickey WateractivityDocumento3 pagineMickey Wateractivityapi-293006069Nessuna valutazione finora
- Punctuated Equilibrium Theory Explaining Stability and Change in Public Policymaking - Syed Rashedul HossenDocumento21 paginePunctuated Equilibrium Theory Explaining Stability and Change in Public Policymaking - Syed Rashedul HossenRashed ShukornoNessuna valutazione finora
- Understanding The Self Midterm Exam - PasigDocumento1 paginaUnderstanding The Self Midterm Exam - PasigEarl Tyrone P. Blanco100% (1)
- Solutions To Mathematics 17 Exercises On Systems of Equations PDFDocumento6 pagineSolutions To Mathematics 17 Exercises On Systems of Equations PDFMichael Christian BaysauliNessuna valutazione finora
- r121 Auto Cash App ErdDocumento2 paginer121 Auto Cash App ErdLam TranNessuna valutazione finora
- Chapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsDocumento8 pagineChapter 8. Converter Transfer Functions: 8.1. Review of Bode PlotsjaronjerNessuna valutazione finora
- DHAVAL Resume 1Documento3 pagineDHAVAL Resume 1garvi_gujaratNessuna valutazione finora
- Thesis Evaluation FrameworkDocumento5 pagineThesis Evaluation FrameworkRadheshyam ThakurNessuna valutazione finora
- Detailed Lesson PlanDocumento7 pagineDetailed Lesson PlanMarjen MabasagNessuna valutazione finora
- Full HRM Notes by Ram Chad Ran SirDocumento122 pagineFull HRM Notes by Ram Chad Ran SirKrupa PatilNessuna valutazione finora
- Science Companion Earth's Changing Surface Virtual Field TripDocumento90 pagineScience Companion Earth's Changing Surface Virtual Field TripScience Companion100% (2)
- Effective Use of Teaching AidsDocumento25 pagineEffective Use of Teaching AidsAdibah AnuarNessuna valutazione finora
- Antibiotic Resistance Gene Testing of Recycled Water Samples in Flagstaff, AZDocumento7 pagineAntibiotic Resistance Gene Testing of Recycled Water Samples in Flagstaff, AZkrtica8061Nessuna valutazione finora
- Summer Training Emp. SatisfactionDocumento34 pagineSummer Training Emp. SatisfactionAkash DixitNessuna valutazione finora
- G120 Cu240beDocumento942 pagineG120 Cu240beRaphael Paulino BertiNessuna valutazione finora
- ST - Lucia Seventh-Day Adventist Academy Physics Notes Form 5 October 18, 2016Documento3 pagineST - Lucia Seventh-Day Adventist Academy Physics Notes Form 5 October 18, 2016Anna Lyse MosesNessuna valutazione finora
- AR0001 Concept Design Rev ADocumento28 pagineAR0001 Concept Design Rev AJulian JuniorNessuna valutazione finora
- Release Notes: 2288H V5&1288H V5&2288C V5&5288 V5 CPLD V212Documento6 pagineRelease Notes: 2288H V5&1288H V5&2288C V5&5288 V5 CPLD V212LTI MaintenanceNessuna valutazione finora
- Actuation SystemDocumento11 pagineActuation SystemNavendu GuptaNessuna valutazione finora
- Effect of Hamstring Emphasized Resistance Training On H-Q Strength RatioDocumento7 pagineEffect of Hamstring Emphasized Resistance Training On H-Q Strength RatioRaja Nurul JannatNessuna valutazione finora