Potrebbero piacerti anche
- Ecuaciones Empiricas Fisica IDocumento10 pagineEcuaciones Empiricas Fisica IJaime IbarraNessuna valutazione finora
- Expresiones AlgebraicasDocumento8 pagineExpresiones AlgebraicasValentin Baten100% (1)
- Calculo de Regulacion de Voltaje RETIEDocumento16 pagineCalculo de Regulacion de Voltaje RETIEHernando Robledo100% (1)
- Análisis Fourier funciones periódicasDocumento26 pagineAnálisis Fourier funciones periódicasvlady33Nessuna valutazione finora
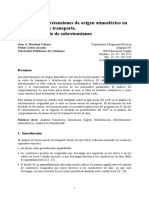
- Cálculo de sobretensiones atmosféricas en líneas eléctricasDocumento33 pagineCálculo de sobretensiones atmosféricas en líneas eléctricasNilton HuarocNessuna valutazione finora
- Guia Practicas 04Documento12 pagineGuia Practicas 04vlady33Nessuna valutazione finora
- Diseño Subestaciones PDFDocumento36 pagineDiseño Subestaciones PDFMaximo SantanaNessuna valutazione finora
- 2000 N3 El Paquete ATPDocumento14 pagine2000 N3 El Paquete ATPAlex RestrepoNessuna valutazione finora
- 2002 N2 FlujoProb PDFDocumento23 pagine2002 N2 FlujoProb PDFFabian PinillaNessuna valutazione finora
- AutoLink Manual de InstruccionesDocumento23 pagineAutoLink Manual de InstruccionesLuis LaraNessuna valutazione finora
- Guia Practicas 01Documento24 pagineGuia Practicas 01vlady33Nessuna valutazione finora
- Deja que Dios se encargueDocumento2 pagineDeja que Dios se encarguevlady33Nessuna valutazione finora
- 00PREVIOSDocumento4 pagine00PREVIOSvlady33Nessuna valutazione finora
- Determinación de Equivalente de TheveninDocumento3 pagineDeterminación de Equivalente de TheveninmjimenezgNessuna valutazione finora
- Cap 1Documento50 pagineCap 1vlady33Nessuna valutazione finora
- Deja que Dios se encargueDocumento2 pagineDeja que Dios se encarguevlady33Nessuna valutazione finora
- Ad BP 0001134Documento161 pagineAd BP 0001134vlady33Nessuna valutazione finora
- Dialnet RegresionBayesianaLinealParaCalibrarLosParametrosD 5065745Documento18 pagineDialnet RegresionBayesianaLinealParaCalibrarLosParametrosD 5065745vlady33Nessuna valutazione finora
- Proteccion de Fallas A Tierra en Sist. de DistribucionDocumento24 pagineProteccion de Fallas A Tierra en Sist. de DistribucionreidderNessuna valutazione finora
- Criterios Técnicos y Económicos para Determinar Un Plan de Mantenimiento SeDocumento101 pagineCriterios Técnicos y Económicos para Determinar Un Plan de Mantenimiento SeselvamejiaNessuna valutazione finora
- Como Alejar La Mala SuerteDocumento1 paginaComo Alejar La Mala Suertevlady33Nessuna valutazione finora
- Especificaciones Técnicas Creador de Neutro ZigDocumento3 pagineEspecificaciones Técnicas Creador de Neutro Zigvlady33Nessuna valutazione finora
- Labpot Practica 02Documento3 pagineLabpot Practica 02vlady33Nessuna valutazione finora
- 4 Consejos Que Me Hubiera Gustado Recibir en Mi Vida ProfesionalDocumento5 pagine4 Consejos Que Me Hubiera Gustado Recibir en Mi Vida Profesionalvlady33Nessuna valutazione finora
- FS14 033Documento3 pagineFS14 033vlady33Nessuna valutazione finora
- Análisis Efec ElectrodDocumento15 pagineAnálisis Efec ElectrodMateo AlvezNessuna valutazione finora
- Análisis Efec ElectrodDocumento15 pagineAnálisis Efec ElectrodMateo AlvezNessuna valutazione finora
- Análisis Efec ElectrodDocumento15 pagineAnálisis Efec ElectrodMateo AlvezNessuna valutazione finora
- XXII CLER Mexico - Alberto GomezDocumento15 pagineXXII CLER Mexico - Alberto Gomezvlady33Nessuna valutazione finora
- U07Documento4 pagineU07Efrain Ccallo Ccalle100% (2)
- Matemáticas Ip 10° PDFDocumento15 pagineMatemáticas Ip 10° PDFJuan David ReyesNessuna valutazione finora
- Actividad 9Documento6 pagineActividad 9andres jimenezNessuna valutazione finora
- Ejercicios p1 Mat-311Documento27 pagineEjercicios p1 Mat-311Daniel Moronta20% (5)
- ALGEBRADocumento13 pagineALGEBRAemanuelNessuna valutazione finora
- Planeación Curso de Cálculo IIDocumento3 paginePlaneación Curso de Cálculo IITebanNessuna valutazione finora
- Transformaciones Geo UtmDocumento20 pagineTransformaciones Geo UtmEnriqueGabrielBeraúnCoronelNessuna valutazione finora
- Ecuaciones exponenciales: 25 ejercicios resueltosDocumento13 pagineEcuaciones exponenciales: 25 ejercicios resueltosbonimenoNessuna valutazione finora
- Atención: Hay Una NUEVA Versión Ampliada y Corregida en HTTP://WWW - Tec-Digital - Itcr.ac - Cr/revistamatematica/libros/. Está en El Segundo Capiítulo Del Libro de Cálculo en Varias Variables.Documento56 pagineAtención: Hay Una NUEVA Versión Ampliada y Corregida en HTTP://WWW - Tec-Digital - Itcr.ac - Cr/revistamatematica/libros/. Está en El Segundo Capiítulo Del Libro de Cálculo en Varias Variables.Walter Mora F.Nessuna valutazione finora
- Examen final de Caminos UCV sobre diagramas de masa, curvas circulares, curvas verticales y cálculo de áreas y volúmenesDocumento6 pagineExamen final de Caminos UCV sobre diagramas de masa, curvas circulares, curvas verticales y cálculo de áreas y volúmenesJhoan's Sebastian Calderón ChávezNessuna valutazione finora
- Cap3 Maquinas y Mecanismos Resumen ShigleyDocumento5 pagineCap3 Maquinas y Mecanismos Resumen ShigleyPascual MaldonadoNessuna valutazione finora
- Método de AnuladorDocumento8 pagineMétodo de AnuladorRossi AndreinaNessuna valutazione finora
- Vias y ComunicacionDocumento8 pagineVias y ComunicacionCarolina SolizNessuna valutazione finora
- Integración de Funciones Trigonométricas PDFDocumento10 pagineIntegración de Funciones Trigonométricas PDFANTONIO SANTANANessuna valutazione finora
- DiegoDocumento2 pagineDiegothe DardevilNessuna valutazione finora
- Taller 4Documento8 pagineTaller 4Angie Pazmiño100% (1)
- Informe AcadémicoDocumento7 pagineInforme Académiconoelia muletNessuna valutazione finora
- Conceptos geométricos en espacios vectorialesDocumento16 pagineConceptos geométricos en espacios vectorialesHarold PeraltaNessuna valutazione finora
- Deduccion Matriz de Rigidez de Un Elemento Tipo VigaDocumento10 pagineDeduccion Matriz de Rigidez de Un Elemento Tipo VigaHaroldBriñezNessuna valutazione finora
- PPT2 Func CuadráricasDocumento11 paginePPT2 Func CuadráricasJean BecerraNessuna valutazione finora
- T4 - Distribuciones de PerdidaDocumento10 pagineT4 - Distribuciones de PerdidarobertzeluNessuna valutazione finora
- Taller Medidas de TC Y D en ExcelDocumento6 pagineTaller Medidas de TC Y D en ExcelCapitan SandiaNessuna valutazione finora
- Cronograma de Calculo 3Documento2 pagineCronograma de Calculo 3Diego YesidNessuna valutazione finora
- Calculo MultivariadoDocumento6 pagineCalculo MultivariadoELIANA TORRES BOHORQUEZNessuna valutazione finora
- Unidad 5Documento5 pagineUnidad 5yariNessuna valutazione finora
- S11 - Funcion Lineal y Cuadratica y RaizDocumento19 pagineS11 - Funcion Lineal y Cuadratica y Raizakinori cabreraNessuna valutazione finora
- Modelo de Examen o Practica CalificadaDocumento11 pagineModelo de Examen o Practica CalificadaFernandoNessuna valutazione finora
- Quiz 1 Semana 3 Metodos NumericosDocumento5 pagineQuiz 1 Semana 3 Metodos NumericosAngie Caterine Santa RodríguezNessuna valutazione finora