Potrebbero piacerti anche
- Experimentos de Fisica Con Arduino PDFDocumento7 pagineExperimentos de Fisica Con Arduino PDFHenry PhysicsNessuna valutazione finora
- Taller 1 Electricidad y Electrónica 2021 - 1Documento5 pagineTaller 1 Electricidad y Electrónica 2021 - 1Felipe Estrada RodriguezNessuna valutazione finora
- CAF2 - Practica de Lab 2. Ley de Gauss para Campo Eléctrico - EstudianteDocumento7 pagineCAF2 - Practica de Lab 2. Ley de Gauss para Campo Eléctrico - EstudianteAnaiz Palomino100% (1)
- FiliformesDocumento3 pagineFiliformesivanoff1984Nessuna valutazione finora
- La Física y La Prueba Icfes Saber 11Documento176 pagineLa Física y La Prueba Icfes Saber 11IvanMauricio100% (1)
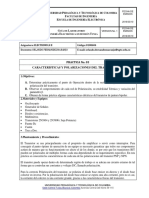
- Práctica No. 3 Flujo EléctricoDocumento5 paginePráctica No. 3 Flujo EléctricoEdgar Macareno100% (1)
- Taller 4 ElectricidadDocumento9 pagineTaller 4 ElectricidadJOAO PABLO LOZANO LINONessuna valutazione finora
- Laboratorio 3Documento5 pagineLaboratorio 3Alejo HernandezNessuna valutazione finora
- CapacitanciaDocumento2 pagineCapacitanciaSárkányLovagrendSárkányLovagrendNessuna valutazione finora
- Electricidad y MagnetismoDocumento112 pagineElectricidad y MagnetismoJuan LopezNessuna valutazione finora
- 1 Limites (1-44)Documento44 pagine1 Limites (1-44)su_cbd100% (1)
- Informe NivelesLogicosDocumento6 pagineInforme NivelesLogicosŠtiveņ ŌrjûëlaNessuna valutazione finora
- Lab 2Documento7 pagineLab 2Jann LeónNessuna valutazione finora
- Circuitos RC Carga y DescargaDocumento28 pagineCircuitos RC Carga y DescargaTrujilloSergioNessuna valutazione finora
- Desarrollo Actividad 3 Rect FinalDocumento2 pagineDesarrollo Actividad 3 Rect FinalHarbey Hernandez SuarezNessuna valutazione finora
- 07 Gravitacion 01 PDFDocumento1 pagina07 Gravitacion 01 PDFDiego Alejandro0% (1)
- Laboratorio Circuitos Eléctricos 2Documento24 pagineLaboratorio Circuitos Eléctricos 2luis angel melendrez chinguel100% (1)
- Practica3 EL AMPLIFICADOR NO INVERSORDocumento4 paginePractica3 EL AMPLIFICADOR NO INVERSORNelson JimenezNessuna valutazione finora
- Informe Carga Electrica PDFDocumento4 pagineInforme Carga Electrica PDFMaier RobiertNessuna valutazione finora
- Informe Velocidad AngularDocumento3 pagineInforme Velocidad AngularJUAN ALARCON MACHETENessuna valutazione finora
- Propuestos 2016 PPL Exam 2Documento4 paginePropuestos 2016 PPL Exam 2angelx5895Nessuna valutazione finora
- Circuitos Con DiodosDocumento6 pagineCircuitos Con DiodosEsteban GarciaNessuna valutazione finora
- Ensayo 'Monopolos Magnéticos'.Documento13 pagineEnsayo 'Monopolos Magnéticos'.Marcelino MartínezNessuna valutazione finora
- Quiz Corte 1Documento3 pagineQuiz Corte 1brayancorreaNessuna valutazione finora
- Electricidad y MegnetismoDocumento6 pagineElectricidad y MegnetismoEnrike CarbajalNessuna valutazione finora
- Taller 1 - Revisión Del Intento 3Documento1 paginaTaller 1 - Revisión Del Intento 3STIVEN GARNICANessuna valutazione finora
- Taller Laboratorio Modelaje y Especificacion de ProblemasDocumento4 pagineTaller Laboratorio Modelaje y Especificacion de ProblemasCamilo AbrilNessuna valutazione finora
- Implementación de Un Motor Lineal DemostrativoDocumento4 pagineImplementación de Un Motor Lineal DemostrativoJorge Luis Jaramillo PachecoNessuna valutazione finora
- Circuitos DCDocumento60 pagineCircuitos DCRazorhellsNessuna valutazione finora
- Trabajo Sobre Informes EstadísticosDocumento10 pagineTrabajo Sobre Informes EstadísticosAgus BuffaNessuna valutazione finora
- Parcial de FisicaDocumento5 pagineParcial de FisicaJairo MojicaNessuna valutazione finora
- Cuestionario Sobre Los Materiales AislantesDocumento1 paginaCuestionario Sobre Los Materiales Aislanteslinda simoesNessuna valutazione finora
- Parcial 2 PYEF Ivan Hernandez Triana PDFDocumento4 pagineParcial 2 PYEF Ivan Hernandez Triana PDFCarlos JimenezNessuna valutazione finora
- Introducción A La Ingeniería EléctricaDocumento13 pagineIntroducción A La Ingeniería EléctricaTatiana Vallejo DocenteNessuna valutazione finora
- Práctica No. 9 Reacciones Redox 3Documento6 paginePráctica No. 9 Reacciones Redox 3AngieEspejoLeañoNessuna valutazione finora
- Manejo de La Escala Lineal y Logarítmica y Método Gráfico y Regresiones para Determinar Ecuaciones ParticularesDocumento2 pagineManejo de La Escala Lineal y Logarítmica y Método Gráfico y Regresiones para Determinar Ecuaciones ParticularesANDRÉS STEVEN ÁLVAREZ GONZÁLEZNessuna valutazione finora
- Lab. Virtual Circuito RC UAN - CICATA IPNDocumento10 pagineLab. Virtual Circuito RC UAN - CICATA IPNjeronimomoraaraujoNessuna valutazione finora
- Práctica 1 "Introducción Al Laboratorio de Circuitos"Documento24 paginePráctica 1 "Introducción Al Laboratorio de Circuitos"germarbusNessuna valutazione finora
- Instrumentación - Cálculo Vectorial PDFDocumento15 pagineInstrumentación - Cálculo Vectorial PDFCs De AnhejNessuna valutazione finora
- Campo Magnético TerrestreDocumento6 pagineCampo Magnético TerrestreEdwar Alexander Hernandez TunarozaNessuna valutazione finora
- Laboratorio Efecto FotoélectricoDocumento6 pagineLaboratorio Efecto FotoélectricoEdisson SSandovalNessuna valutazione finora
- Parcial Semana 4 Primer Intento RevisadoDocumento12 pagineParcial Semana 4 Primer Intento RevisadoANDRES MUÑOZ100% (4)
- Circuito Magnetico-InformeDocumento9 pagineCircuito Magnetico-InformeChristian FonsecaNessuna valutazione finora
- Informe Del Libro Evaluación Por Competencias Por Julio PimientoDocumento7 pagineInforme Del Libro Evaluación Por Competencias Por Julio PimientoSegovia Daniel100% (1)
- FerromagnetismoDocumento22 pagineFerromagnetismoJhonatan Damaris0% (2)
- Taller2 UPTCDocumento3 pagineTaller2 UPTCCamilo Alv CepedaNessuna valutazione finora
- Lab 4 ProgramacionDocumento5 pagineLab 4 ProgramacionGeronimo BustosNessuna valutazione finora
- Tipos de Datos Clases PDFDocumento24 pagineTipos de Datos Clases PDFEva VenturaNessuna valutazione finora
- Diodo Zener, Transistores y Familias Lógicas Digitales - William MataDocumento11 pagineDiodo Zener, Transistores y Familias Lógicas Digitales - William MataWilliamNessuna valutazione finora
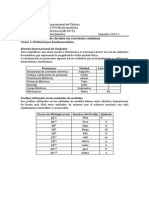
- Tema 1 Definiciones FunfamentalesDocumento7 pagineTema 1 Definiciones FunfamentalesCesarChacon0% (1)
- Angulo de BrewsterDocumento8 pagineAngulo de BrewsterKevin Muyón RiveraNessuna valutazione finora
- Circuito en Serie y ParaleloDocumento6 pagineCircuito en Serie y ParaleloDiego JamiNessuna valutazione finora
- Taller 2 S7 PDFDocumento4 pagineTaller 2 S7 PDFApellido NombreNessuna valutazione finora
- Ley de Ampère Generalizada y Corriente de DesplazamientoDocumento9 pagineLey de Ampère Generalizada y Corriente de DesplazamientoauraNessuna valutazione finora
- Cir2 ResistenciaDocumento21 pagineCir2 ResistenciaXavi RodriguezNessuna valutazione finora
- Diseño, Simulación e Implementación de Circuitos Eléctricos en DC y AC (1) (Reparado)Documento5 pagineDiseño, Simulación e Implementación de Circuitos Eléctricos en DC y AC (1) (Reparado)Javier SolisNessuna valutazione finora
- Instrumentacion de Fisica de SemiconductoresDocumento38 pagineInstrumentacion de Fisica de Semiconductoresgarciajhonn17Nessuna valutazione finora
- Informe - 5 - Diseño y Construcción de Capacitores PDFDocumento6 pagineInforme - 5 - Diseño y Construcción de Capacitores PDFJuan David Muñoz PasquelNessuna valutazione finora
- Actuadores Motor DCDocumento15 pagineActuadores Motor DCu1802111Nessuna valutazione finora
- Reporte #10Documento14 pagineReporte #10juan_samaniego_60Nessuna valutazione finora
- Asignacion 1Documento26 pagineAsignacion 1JesusAlbertoMizgerNessuna valutazione finora
- Practica 2 PotenciometroDocumento20 paginePractica 2 PotenciometroCarlos Brayan Silva100% (1)
- Funciones de La BiomecanicaDocumento3 pagineFunciones de La BiomecanicaFernandaNessuna valutazione finora
- Pract 04 Dispos ElectDocumento11 paginePract 04 Dispos ElectEduardo ValdezNessuna valutazione finora
- ElectrostáticaDocumento4 pagineElectrostáticaBonitzuZTNessuna valutazione finora
- Modelado y Control PID en Cascada de Un Cuadricóptero para Seguimiento de TrayectoriasDocumento7 pagineModelado y Control PID en Cascada de Un Cuadricóptero para Seguimiento de TrayectoriasALEX JULIAN BUITRAGO RANGELNessuna valutazione finora
- Trifasico CadesimuDocumento6 pagineTrifasico CadesimujealromaNessuna valutazione finora
- Investigacion Individual 3 Lab Fisica 3Documento5 pagineInvestigacion Individual 3 Lab Fisica 3Fernando RodriguezNessuna valutazione finora
- Practica Labo Fisica 7Documento10 paginePractica Labo Fisica 7JHON SARMIENTO PEREZ ESPINONessuna valutazione finora
- Fuerza EspecificaDocumento165 pagineFuerza Especificaadrian100% (3)
- Pérdida de Peso para La MenteDocumento40 paginePérdida de Peso para La MenteMAR4ITZAMGHANessuna valutazione finora
- Wuolah Free Enunciados Movimiento Ondulatorio Ondas SonorasDocumento6 pagineWuolah Free Enunciados Movimiento Ondulatorio Ondas SonorasMyriam MatferNessuna valutazione finora
- Reporte de Levantamiento Carga Eléctrica PDFDocumento5 pagineReporte de Levantamiento Carga Eléctrica PDFDavid CortésNessuna valutazione finora
- Informe Sistema de Puesta A TierraDocumento10 pagineInforme Sistema de Puesta A TierraVICTOR JOSE LLANES PEREZNessuna valutazione finora
- Propuesta de Aprendizaje Fisica Grado Sexto Iv PeriodoDocumento7 paginePropuesta de Aprendizaje Fisica Grado Sexto Iv PeriodoMARIAN MORENO BAILONNessuna valutazione finora
- Guia 8Documento6 pagineGuia 8Nataly NavarroNessuna valutazione finora
- Exámen FinalDocumento7 pagineExámen FinalMatematica Fisica EstadisticaNessuna valutazione finora
- Transistor BJTDocumento8 pagineTransistor BJTSantiago Espitia TorresNessuna valutazione finora
- 1.pedestal Radial 5500 KvaDocumento2 pagine1.pedestal Radial 5500 KvaIvan Dario Aislant CordobaNessuna valutazione finora
- Numero de FroudeDocumento7 pagineNumero de FroudeAlejandroFukisMoscosoMeloNessuna valutazione finora
- Rotación Con Respecto A Un Eje ArbitrarioDocumento5 pagineRotación Con Respecto A Un Eje ArbitrarioGiselle DelluroNessuna valutazione finora
- I.T. Conexión de Pantallas en Alta TensiónDocumento11 pagineI.T. Conexión de Pantallas en Alta TensiónRoberto Martínez100% (1)
- 9 P-OI-18 Procedimiento de Inspección de Puertas Automáticas v3Documento16 pagine9 P-OI-18 Procedimiento de Inspección de Puertas Automáticas v3kevin nair melgarejo morales0% (1)
- Problemas de Energtica - FQIDocumento6 pagineProblemas de Energtica - FQIMari Carmen Jodar MenaNessuna valutazione finora
- Tarea de EstabilidadDocumento1 paginaTarea de EstabilidadJuan ZuluagaNessuna valutazione finora
- Práctica 4. Análisis Dinámico. Casos EspecialesDocumento12 paginePráctica 4. Análisis Dinámico. Casos EspecialesBERTINessuna valutazione finora
- Enchufes e InterruptoresDocumento18 pagineEnchufes e InterruptoresEstudiante INGNessuna valutazione finora
- Guia Tecnica para El Instalador Electricista 2013Documento128 pagineGuia Tecnica para El Instalador Electricista 2013MarceloRios100% (1)