Potrebbero piacerti anche
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Megaplex-4100 Manual Sheet New PDFDocumento912 pagineMegaplex-4100 Manual Sheet New PDFRohith Gourishetty0% (1)
- Verilog Quick Reference CardDocumento12 pagineVerilog Quick Reference CardHector CabreraNessuna valutazione finora
- PPT1Documento20 paginePPT1Rohith GourishettyNessuna valutazione finora
- Cognitive Radio Networks (Chapters)Documento32 pagineCognitive Radio Networks (Chapters)Rohith GourishettyNessuna valutazione finora
- 05282507Documento10 pagine05282507Rohith GourishettyNessuna valutazione finora
- Protecting Location Privacy in Sensor Networks Against A Global EavesdropperDocumento10 pagineProtecting Location Privacy in Sensor Networks Against A Global EavesdropperRohith GourishettyNessuna valutazione finora
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Nammcesa 000010 PDFDocumento1.543 pagineNammcesa 000010 PDFBasel Osama RaafatNessuna valutazione finora
- C TKP3 SMQDocumento11 pagineC TKP3 SMQDavid Tovar cruzNessuna valutazione finora
- Web Bearing and Buck1ling To BS en 1993Documento3 pagineWeb Bearing and Buck1ling To BS en 1993antoninoNessuna valutazione finora
- 2UEB000133 ACS2000 4kV Motor Temp Supervision Rev BDocumento3 pagine2UEB000133 ACS2000 4kV Motor Temp Supervision Rev BSherifNessuna valutazione finora
- Dump Truck TBTDocumento1 paginaDump Truck TBTLiaquat MuhammadNessuna valutazione finora
- 1-10 Clariant - Prasant KumarDocumento10 pagine1-10 Clariant - Prasant Kumarmsh43Nessuna valutazione finora
- 7779 19506 1 PBDocumento24 pagine7779 19506 1 PBAyessa FerrerNessuna valutazione finora
- Cognizant Company FAQDocumento4 pagineCognizant Company FAQManojChowdary100% (1)
- Overview 6T40-45 TransmissionDocumento14 pagineOverview 6T40-45 TransmissionLeigh100% (1)
- Manual de Colisión Mazda 626 1986-1987Documento9 pagineManual de Colisión Mazda 626 1986-1987mark rueNessuna valutazione finora
- FZCODocumento30 pagineFZCOawfNessuna valutazione finora
- Pumpkin Cultivation and PracticesDocumento11 paginePumpkin Cultivation and PracticesGhorpade GsmNessuna valutazione finora
- c15 ldn01610 SchematicDocumento4 paginec15 ldn01610 SchematicJacques Van Niekerk50% (2)
- 1.SITXWHS003 Student Assessment Tasks 1Documento58 pagine1.SITXWHS003 Student Assessment Tasks 1Yashaswi GhimireNessuna valutazione finora
- Muji Into Denmark MarketDocumento13 pagineMuji Into Denmark MarketTròn QuayyNessuna valutazione finora
- 'G' by Free Fall Experiment Lab ReportDocumento3 pagine'G' by Free Fall Experiment Lab ReportRaghav SinhaNessuna valutazione finora
- Digest of Agrarian From DAR WebsiteDocumento261 pagineDigest of Agrarian From DAR WebsiteHuzzain PangcogaNessuna valutazione finora
- PDF 5Documento75 paginePDF 5فرزاد ”Angra“ mavaraniNessuna valutazione finora
- The Mechanism of Notifying and Record Keeping Three Forms Are Used For Notifying and Record KeepingDocumento6 pagineThe Mechanism of Notifying and Record Keeping Three Forms Are Used For Notifying and Record KeepingRoger FernandezNessuna valutazione finora
- Drafting Foundation PlanDocumento24 pagineDrafting Foundation Planerol bancoroNessuna valutazione finora
- Ps 6013 Geometric Dimensioning and Tolerancing Symbology Method, Usage and Definitions 2013-08-01 (G)Documento18 paginePs 6013 Geometric Dimensioning and Tolerancing Symbology Method, Usage and Definitions 2013-08-01 (G)maheshmbelgaviNessuna valutazione finora
- LSM - Neutral Axis Depth CalculationDocumento2 pagineLSM - Neutral Axis Depth CalculationHimal KafleNessuna valutazione finora
- Hyperion 2 PDFDocumento1 paginaHyperion 2 PDFAbhishek Gite100% (1)
- The Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Documento8 pagineThe Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Stephen James - Independent Investigative Journalism & PhotographyNessuna valutazione finora
- Java Programming Unit5 Notes PDFDocumento110 pagineJava Programming Unit5 Notes PDFVishnu VardhanNessuna valutazione finora
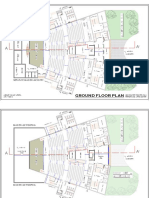
- Abhijit Auditorium Elective Sem 09Documento3 pagineAbhijit Auditorium Elective Sem 09Abhijit Kumar AroraNessuna valutazione finora
- APUS Court Cases: Escobedo V IllinoisDocumento4 pagineAPUS Court Cases: Escobedo V Illinoisapi-3709436100% (1)
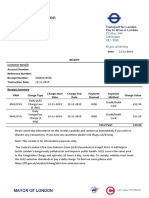
- Transport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDocumento1 paginaTransport For London Pay To Drive in London: PO Box 344 Darlington Dl1 9qe TFL - Gov.uk/drivingDanyy MaciucNessuna valutazione finora
- Status Of: Philippine ForestsDocumento11 pagineStatus Of: Philippine ForestsAivy Rose VillarbaNessuna valutazione finora
- Aperio CS2 BrochureDocumento3 pagineAperio CS2 BrochurelailaNessuna valutazione finora