Potrebbero piacerti anche
- GSM - Architecture, Protocols and ServicesDa EverandGSM - Architecture, Protocols and ServicesValutazione: 1 su 5 stelle1/5 (1)
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideDa EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideValutazione: 5 su 5 stelle5/5 (2)
- Notes RosDocumento51 pagineNotes RosBusayo OjumuNessuna valutazione finora
- SdccmanDocumento124 pagineSdccmanDesberNatalyoSinagaNessuna valutazione finora
- SBXPC OCX Reference Manual v3.12 - NeutralDocumento50 pagineSBXPC OCX Reference Manual v3.12 - Neutralferittandogan100% (1)
- sg248041 - RACF - RRSF (Remote Sharing Facility) - TCPIPDocumento164 paginesg248041 - RACF - RRSF (Remote Sharing Facility) - TCPIPO. SalvianoNessuna valutazione finora
- Interoperable Python ZSI WSDL/SOAP Web Services TutorialDocumento66 pagineInteroperable Python ZSI WSDL/SOAP Web Services TutorialCamilo Serrano TNessuna valutazione finora
- OpenShift Online 2.0 REST API Guide en USDocumento160 pagineOpenShift Online 2.0 REST API Guide en USrch978Nessuna valutazione finora
- Wpa Supplicant DevelDocumento1.952 pagineWpa Supplicant DevelakpolatcemNessuna valutazione finora
- Esp8266 Rtos SDK API ReferenceDocumento182 pagineEsp8266 Rtos SDK API ReferenceRafting powerNessuna valutazione finora
- RFC 4861Documento96 pagineRFC 4861AnkitNessuna valutazione finora
- SdccmanDocumento124 pagineSdccmanalberto55Nessuna valutazione finora
- Ryu BookDocumento149 pagineRyu Bookers1stNessuna valutazione finora
- Omni ORBDocumento133 pagineOmni ORBsvetozarandicNessuna valutazione finora
- Anynet Sna Over TcpipDocumento262 pagineAnynet Sna Over TcpipIno Gomez Larroza100% (1)
- TCPstack Embedded SystemDocumento98 pagineTCPstack Embedded SystemMuneeb AhmadNessuna valutazione finora
- Omni 3000 - 6000 Modbus Database 4CDocumento178 pagineOmni 3000 - 6000 Modbus Database 4CRio Ananda Putra100% (1)
- RFC 8572Documento88 pagineRFC 8572elracoNessuna valutazione finora
- Hipath 40000 Deployment-Service V7 enDocumento1.436 pagineHipath 40000 Deployment-Service V7 enViệt TrầnNessuna valutazione finora
- OpenScape V2.0 Installation GuideDocumento284 pagineOpenScape V2.0 Installation Guidesorin birouNessuna valutazione finora
- OpenShift Online 2.0 User Guide en USDocumento80 pagineOpenShift Online 2.0 User Guide en USrch978Nessuna valutazione finora
- LinBit - HA NFS Cluster Using Pacemaker & DRBD On RHEL7Documento14 pagineLinBit - HA NFS Cluster Using Pacemaker & DRBD On RHEL7Serge PallaNessuna valutazione finora
- Aa Pv60a TKDocumento336 pagineAa Pv60a TKAgbita OdomeroNessuna valutazione finora
- OpenText Directory Services 16.4.2 - Installation and Administration Guide English (OTDS160402-IWC-EN-04)Documento368 pagineOpenText Directory Services 16.4.2 - Installation and Administration Guide English (OTDS160402-IWC-EN-04)Aymen EL ARBINessuna valutazione finora
- Base Functions Connectivity and Routing Voulme 1 IBMDocumento514 pagineBase Functions Connectivity and Routing Voulme 1 IBMGaleti EkramNessuna valutazione finora
- BGP DocumentationDocumento57 pagineBGP Documentationwillfrank89Nessuna valutazione finora
- OPC SchedulerDocumento444 pagineOPC SchedulerSayandeep BanikNessuna valutazione finora
- Protocol Common Concepts Reference ManualDocumento101 pagineProtocol Common Concepts Reference ManualJOSENessuna valutazione finora
- Progress ODBC Driver GuideDocumento86 pagineProgress ODBC Driver Guidejefferson FrancoNessuna valutazione finora
- Manual: Movi-Plc Advanced Dhr41B Controller Ethernet/Ip, Modbus/Tcp and Profinet Io Fieldbus InterfacesDocumento130 pagineManual: Movi-Plc Advanced Dhr41B Controller Ethernet/Ip, Modbus/Tcp and Profinet Io Fieldbus InterfacesAlexandre FerreiraNessuna valutazione finora
- Using Tivoli To Manage A Large-Scale SAP R 3 EnvironmentDocumento432 pagineUsing Tivoli To Manage A Large-Scale SAP R 3 Environmentranjan_4779Nessuna valutazione finora
- Sqlmap - ReadmeDocumento93 pagineSqlmap - ReadmexhachexNessuna valutazione finora
- Red Hat Enterprise Linux 6 DM Multipath en USDocumento46 pagineRed Hat Enterprise Linux 6 DM Multipath en USAmit KumarNessuna valutazione finora
- PROCSatellite Router IC Guide iDX 32rev C01312014Documento130 paginePROCSatellite Router IC Guide iDX 32rev C01312014Lucas CorreaNessuna valutazione finora
- SG 246022Documento506 pagineSG 246022Suresh Kumar100% (1)
- Bluetooth ProjectDocumento89 pagineBluetooth Projectdivz16Nessuna valutazione finora
- As400 OledbDocumento436 pagineAs400 OledbDiego LopezNessuna valutazione finora
- LTRT-31620 Typical SBC Deployment Examples Configuration NoteDocumento76 pagineLTRT-31620 Typical SBC Deployment Examples Configuration NotefanticelliNessuna valutazione finora
- Using Zend Framework 2Documento506 pagineUsing Zend Framework 2JacquelineNahirSterembergNessuna valutazione finora
- JdlmsDocumento12 pagineJdlmschristianNessuna valutazione finora
- Kaldi SRUsage ManualDocumento31 pagineKaldi SRUsage ManualAkshay MalikNessuna valutazione finora
- OpenText Directory Services 16.2.3 - Installation and Administration Guide English (OTDS160203-IWC-EN-02)Documento358 pagineOpenText Directory Services 16.2.3 - Installation and Administration Guide English (OTDS160203-IWC-EN-02)Aymen EL ARBI100% (1)
- Cubes - Lightweight Python OLAP FrameworkDocumento103 pagineCubes - Lightweight Python OLAP FrameworkStefan Urbanek100% (1)
- Tivoli and WebSphere Application Server On Z-OS Sg247062Documento384 pagineTivoli and WebSphere Application Server On Z-OS Sg247062bupbechanhNessuna valutazione finora
- DSCDocumento41 pagineDSCBan MaiNessuna valutazione finora
- FTEL Lab Case Study v1.5Documento126 pagineFTEL Lab Case Study v1.5Anh TúNessuna valutazione finora
- GplexDocumento96 pagineGplexJesús LöpezNessuna valutazione finora
- 1-OpenWrt-LEDE Installation Guide For HH5A v1.75cDocumento175 pagine1-OpenWrt-LEDE Installation Guide For HH5A v1.75caaNessuna valutazione finora
- Shishi - Kerberos 5 Implementation For The GNU SystemDocumento285 pagineShishi - Kerberos 5 Implementation For The GNU SysteminfobitsNessuna valutazione finora
- Core ManualDocumento64 pagineCore ManualDhiren GoyalNessuna valutazione finora
- IBM Communications Server For Data Center Deployment V7.0: PaperDocumento60 pagineIBM Communications Server For Data Center Deployment V7.0: PaperWilliam Agis DevolderNessuna valutazione finora
- VDC v5.4.02 - Server & OS Installation Guide PDFDocumento116 pagineVDC v5.4.02 - Server & OS Installation Guide PDFMarcelo Mendonça BernardesNessuna valutazione finora
- Python C API Reference ManualDocumento142 paginePython C API Reference ManualCarlos Paz100% (1)
- Puppet Enterprise 1.0 ManualDocumento26 paginePuppet Enterprise 1.0 ManualremyrouxNessuna valutazione finora
- Sqlmap Manual PDFDocumento46 pagineSqlmap Manual PDFJavier Guzman100% (2)
- FSP KHB enDocumento219 pagineFSP KHB entkzNessuna valutazione finora
- Embedded DSP Processor Design: Application Specific Instruction Set ProcessorsDa EverandEmbedded DSP Processor Design: Application Specific Instruction Set ProcessorsNessuna valutazione finora
- Intelligent Sensor Design Using the Microchip dsPICDa EverandIntelligent Sensor Design Using the Microchip dsPICNessuna valutazione finora
- Space/Terrestrial Mobile Networks: Internet Access and QoS SupportDa EverandSpace/Terrestrial Mobile Networks: Internet Access and QoS SupportNessuna valutazione finora
- QUANTUM Q1000 Advanced ProtocolsDocumento2 pagineQUANTUM Q1000 Advanced Protocolsgundala2000Nessuna valutazione finora
- Lc1f2254 Datasheet WW En-WwDocumento3 pagineLc1f2254 Datasheet WW En-Wwramiz razaNessuna valutazione finora
- Frizz Dual ManualDocumento2 pagineFrizz Dual ManualManuel Francisco de PereaNessuna valutazione finora
- Harvey Newman Receives Department of Energy, Office of High Energy Physics Lifelong Achievement AwardDocumento2 pagineHarvey Newman Receives Department of Energy, Office of High Energy Physics Lifelong Achievement AwardMaria SpiropuluNessuna valutazione finora
- PassThru API 1Documento83 paginePassThru API 1andaposa9Nessuna valutazione finora
- Laptop Sebagai Teman Siswa: Laptop As Students' FriendDocumento1 paginaLaptop Sebagai Teman Siswa: Laptop As Students' Friendtigor lianda manik07Nessuna valutazione finora
- GCC 5241PDocumento16 pagineGCC 5241Pboating1997Nessuna valutazione finora
- GT-8 ManualDocumento100 pagineGT-8 Manualxxsamhalnxx5204Nessuna valutazione finora
- GUIDE TO AUTOCAD BASICS 2d PlanningDocumento38 pagineGUIDE TO AUTOCAD BASICS 2d PlanningJohn Nichole Hernandez DacanayNessuna valutazione finora
- Government Approved Workshop Gazette NotificationDocumento9 pagineGovernment Approved Workshop Gazette NotificationadheesNessuna valutazione finora
- Demantra SOP EBS Integration Process v1.0Documento20 pagineDemantra SOP EBS Integration Process v1.0kmurali321100% (1)
- DCS OverviewDocumento11 pagineDCS Overviewruslaninst100% (1)
- UM HDL Buspro Setup Tool 2 (2020!05!23)Documento32 pagineUM HDL Buspro Setup Tool 2 (2020!05!23)crisma tariNessuna valutazione finora
- Arrays and ClassesDocumento97 pagineArrays and ClassesCHRISTINE JOY. MOLINANessuna valutazione finora
- Traning Report - 01914803618 - Ansh PuriDocumento111 pagineTraning Report - 01914803618 - Ansh PuriVansh puriNessuna valutazione finora
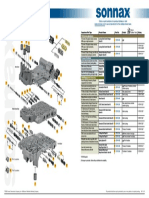
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDocumento1 paginaAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- Product Thinking vs. Project ThinkingDocumento8 pagineProduct Thinking vs. Project ThinkingUjwal TickooNessuna valutazione finora
- AsdfghjklDocumento2 pagineAsdfghjklAdventurous FreakNessuna valutazione finora
- 5th Harmonic Resonance: Power QualityDocumento2 pagine5th Harmonic Resonance: Power QualityLorena OrtizNessuna valutazione finora
- Types of Computer Networks: Maninder KaurDocumento18 pagineTypes of Computer Networks: Maninder Kaurdaniel ayobamiNessuna valutazione finora
- CareerCentre Resume and Cover Letter Toolkit - UofTDocumento32 pagineCareerCentre Resume and Cover Letter Toolkit - UofTMallikaShakyaNessuna valutazione finora
- Familiarization of Measuring Instruments and Tools HandoutDocumento9 pagineFamiliarization of Measuring Instruments and Tools HandoutVineeth WilsonNessuna valutazione finora
- HackingDocumento78 pagineHackingAnanth Balakrishnan100% (15)
- Construction Planning and SchedulingDocumento11 pagineConstruction Planning and SchedulingAWAKSEORANGNessuna valutazione finora
- CS-C12BKPG Cu-2c24bkp5gDocumento70 pagineCS-C12BKPG Cu-2c24bkp5gDũng LêNessuna valutazione finora
- Kiln Shell Laser ManualDocumento19 pagineKiln Shell Laser Manualบิ๊ก บิ๊กNessuna valutazione finora
- Cummins Gas EngineDocumento2 pagineCummins Gas EngineСемен ГассеевNessuna valutazione finora
- Pre Test - CC 201 - Introduction To Computing PDFDocumento2 paginePre Test - CC 201 - Introduction To Computing PDFangel grace layaoNessuna valutazione finora
- PDG 40S QeDocumento2 paginePDG 40S QeSamuel S. RoxasNessuna valutazione finora
- Fully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityDocumento9 pagineFully Automated 3D Colon Segmentation and Volume Rendering in Virtual RealityJamil Al-idrusNessuna valutazione finora