Potrebbero piacerti anche
- Khaana Khazana The Complete Food Guide Sanjeev KapoorDocumento1.371 pagineKhaana Khazana The Complete Food Guide Sanjeev Kapoormdavda909100% (2)
- 2023Summit-Priotitizing Water Efficiency-SlidesDocumento46 pagine2023Summit-Priotitizing Water Efficiency-Slidesfarooq929Nessuna valutazione finora
- Instruction Manual For Flame-Proof (Exd) Resistant Thermometers and ThermocouplesDocumento20 pagineInstruction Manual For Flame-Proof (Exd) Resistant Thermometers and Thermocouplesfarooq929Nessuna valutazione finora
- Product Datasheet: LUMILUX T8 - Tubular Fluorescent Lamps 26 MM, With G13 BasesDocumento6 pagineProduct Datasheet: LUMILUX T8 - Tubular Fluorescent Lamps 26 MM, With G13 Basesfarooq929Nessuna valutazione finora
- 26 24 19.30 ArDocumento20 pagine26 24 19.30 Arfarooq929Nessuna valutazione finora
- Important Changes Regarding TÜV Rheinland Certificates.: Dear CustomerDocumento2 pagineImportant Changes Regarding TÜV Rheinland Certificates.: Dear Customerfarooq929Nessuna valutazione finora
- 240-61227631 Piping and Instrumentation Diagram Standard Rev 1Documento69 pagine240-61227631 Piping and Instrumentation Diagram Standard Rev 1AdventurerNessuna valutazione finora
- 4pps EcoChill v7 LR PDFDocumento4 pagine4pps EcoChill v7 LR PDFfarooq929Nessuna valutazione finora
- 6221 ProtectionACCables DT 2010610 PDFDocumento14 pagine6221 ProtectionACCables DT 2010610 PDFfarooq929Nessuna valutazione finora
- Working Overhead Underground Electric LinesDocumento62 pagineWorking Overhead Underground Electric LinesKanupriyaNessuna valutazione finora
- NZM Catalog 02 2012 enDocumento234 pagineNZM Catalog 02 2012 enengenhariamaccari100% (2)
- AspiratingSmokeDetectors AppGuide ASAG442Documento88 pagineAspiratingSmokeDetectors AppGuide ASAG442farooq929Nessuna valutazione finora
- 2005 16 Autumn Wiring Matters Complete No Adverts PDFDocumento19 pagine2005 16 Autumn Wiring Matters Complete No Adverts PDFGayoom AbdulNessuna valutazione finora
- Britool TORQUE WRENCH PDFDocumento2 pagineBritool TORQUE WRENCH PDFfarooq929Nessuna valutazione finora
- IP AddressesDocumento23 pagineIP Addressesfarooq929Nessuna valutazione finora
- 17 Vesda Vli Tds A4 Ie LoresDocumento2 pagine17 Vesda Vli Tds A4 Ie Loresfarooq929Nessuna valutazione finora
- 03 PROFIBUS Design Good PracticesDocumento0 pagine03 PROFIBUS Design Good PracticescatalinccNessuna valutazione finora
- TM Smartcool 6 200kwDocumento194 pagineTM Smartcool 6 200kwfarooq929Nessuna valutazione finora
- ISO13 CHK DemoDocumento5 pagineISO13 CHK Demofarooq929Nessuna valutazione finora
- Indg139 PDFDocumento10 pagineIndg139 PDFmaneesh_03Nessuna valutazione finora
- Legrand SwiftclipDocumento4 pagineLegrand Swiftclipfarooq929Nessuna valutazione finora
- Cablofil Steel Wire Cable TrayDocumento132 pagineCablofil Steel Wire Cable Trayfarooq929Nessuna valutazione finora
- 4pps EcoChill v7 LRDocumento4 pagine4pps EcoChill v7 LRfarooq929Nessuna valutazione finora
- Work at Height Rescue PlanDocumento11 pagineWork at Height Rescue PlanSaher100% (3)
- Tray and Ladder Practice GuideDocumento73 pagineTray and Ladder Practice GuidemariusrotaruNessuna valutazione finora
- Ez-Path Fire Stopping DevicesDocumento12 pagineEz-Path Fire Stopping Devicesfarooq929Nessuna valutazione finora
- Calculating Max Demand Kilovolt-Amperes and Required Cable Current RatingDocumento2 pagineCalculating Max Demand Kilovolt-Amperes and Required Cable Current Ratingfarooq929Nessuna valutazione finora
- Cable Design - New (22.8.12)Documento93 pagineCable Design - New (22.8.12)zanibabNessuna valutazione finora
- Load Flow AnalysisDocumento1 paginaLoad Flow AnalysispvpavanNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (120)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- VMware VSphere Troubleshooting 5.5Documento224 pagineVMware VSphere Troubleshooting 5.5Eugen-Florian NegruNessuna valutazione finora
- QlikView Sviluppo Progettuale enDocumento5 pagineQlikView Sviluppo Progettuale enEleazar BrionesNessuna valutazione finora
- TV FaultsDocumento1.026 pagineTV Faultsdasho1Nessuna valutazione finora
- Reduced Vertical Separation Minimum - RVSM: IVAO HQ Training DepartmentDocumento4 pagineReduced Vertical Separation Minimum - RVSM: IVAO HQ Training DepartmentjesusNessuna valutazione finora
- (The M.I.T. Introductory Physics Series) A. P French - Vibrations and Waves-Norton (1971)Documento9 pagine(The M.I.T. Introductory Physics Series) A. P French - Vibrations and Waves-Norton (1971)Simran GiriNessuna valutazione finora
- Duty Engineer: Grand Mercure & Ibis Yogyakarta Adi SuciptoDocumento1 paginaDuty Engineer: Grand Mercure & Ibis Yogyakarta Adi Suciptoali maulana yuthiaNessuna valutazione finora
- Manual Safety Relays 3SK2 en-USDocumento352 pagineManual Safety Relays 3SK2 en-USKarina Ospina100% (3)
- Government Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesDocumento18 pagineGovernment Polytechnic Muzaffarpur: Name of The Lab: Power Electronics & DrivesVK DNessuna valutazione finora
- A-Class Mark II: Print Engines For ApplicatorsDocumento25 pagineA-Class Mark II: Print Engines For ApplicatorsJeffery ReynoldsNessuna valutazione finora
- 2008 Nissan Teana J32 Service Manual-HacDocumento245 pagine2008 Nissan Teana J32 Service Manual-HacMrihexNessuna valutazione finora
- Cabezas de Rotulas-RotulasDocumento64 pagineCabezas de Rotulas-RotulasFRANCISCO100% (1)
- S2N Gyro Interface ManualDocumento20 pagineS2N Gyro Interface ManualAfrizal Setiawan100% (1)
- Detailed Lesson Log in MathematicsDocumento7 pagineDetailed Lesson Log in MathematicsChan Chan100% (1)
- Test Certificates Stainless SteelDocumento4 pagineTest Certificates Stainless SteelSurajPandey33% (3)
- Blender 04Documento38 pagineBlender 04Ana Maria100% (1)
- After12th FinalDocumento114 pagineAfter12th FinaltransendenceNessuna valutazione finora
- Server and Workstation AdministrationDocumento454 pagineServer and Workstation AdministrationScott CarneyNessuna valutazione finora
- Tkinter GUI Programming by ExampleDocumento374 pagineTkinter GUI Programming by ExampleArphan Desoja100% (5)
- Cscope Maps - VimDocumento3 pagineCscope Maps - VimGaurav SharmaNessuna valutazione finora
- Electrical Power Systems Wadhwa 15Documento1 paginaElectrical Power Systems Wadhwa 15ragupaNessuna valutazione finora
- Android User GuideDocumento15 pagineAndroid User GuideAnonymous 1Wb6JCkNessuna valutazione finora
- PanavisionSVI ELIS 1024A Datasheet PDS0004RevJDocumento13 paginePanavisionSVI ELIS 1024A Datasheet PDS0004RevJAmarnath M DamodaranNessuna valutazione finora
- Sheet 3Documento5 pagineSheet 3Yasmin RedaNessuna valutazione finora
- The Mpeg Dash StandardDocumento6 pagineThe Mpeg Dash Standard9716755397Nessuna valutazione finora
- Sao Paulo Brand BookDocumento104 pagineSao Paulo Brand Booknicoagudelo82Nessuna valutazione finora
- Software Project Engineer in Richland Kennewick Pasco WA Resume Robert VeklotzDocumento2 pagineSoftware Project Engineer in Richland Kennewick Pasco WA Resume Robert VeklotzRobertVeklotzNessuna valutazione finora
- Renderoc RsxtraDocumento4 pagineRenderoc RsxtraBalasubramanian AnanthNessuna valutazione finora
- Snare Drum: Some Entries From Various Sources (Loosely Cited)Documento6 pagineSnare Drum: Some Entries From Various Sources (Loosely Cited)gljebglejebNessuna valutazione finora
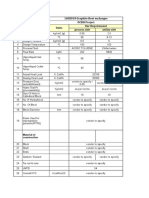
- 16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideDocumento2 pagine16HE018 Graphite Heat Exchanger DCBH Project Sr. No. Particulars Units Our Requirement Process Side Utility SideBhaumik BhuvaNessuna valutazione finora
- Altair EngineeringDocumento11 pagineAltair EngineeringKarthikNessuna valutazione finora