Potrebbero piacerti anche
- CMM COMPONENT ELT 570-5000 - Rev - ADocumento81 pagineCMM COMPONENT ELT 570-5000 - Rev - AREY DAVIDNessuna valutazione finora
- Active Power Factor Correction Technique For Single Phase Full Bridge RectifierDocumento6 pagineActive Power Factor Correction Technique For Single Phase Full Bridge RectifierAnand KumarNessuna valutazione finora
- Transactional Memory BookDocumento226 pagineTransactional Memory Bookj2ch5en100% (1)
- Intro To Quantum ComputingDocumento742 pagineIntro To Quantum Computingasdfasdfasdf786Nessuna valutazione finora
- Plasma Antenna Seminar ReportDocumento24 paginePlasma Antenna Seminar ReportRajendra Choudhary75% (8)
- AP Invoice ConversionDocumento22 pagineAP Invoice Conversionsivananda11Nessuna valutazione finora
- 5400 Replace BBU BlockDocumento15 pagine5400 Replace BBU BlockAhmed HaggarNessuna valutazione finora
- SUPER Final ImportDocumento41 pagineSUPER Final ImportronaldNessuna valutazione finora
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocumento12 pagineDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNessuna valutazione finora
- A Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueDocumento56 pagineA Two-Phase Interleaved Power Factor Correction Boost Converter With A Variation-Tolerant Phase Shifting TechniqueVineetKumarNessuna valutazione finora
- Unit 1: 18Cs206 Basic of Electrical and Electronics EngineeringDocumento21 pagineUnit 1: 18Cs206 Basic of Electrical and Electronics EngineeringAJAY SNessuna valutazione finora
- Fuzzy Based Reconfigurable Controller For BLDC MotorDocumento7 pagineFuzzy Based Reconfigurable Controller For BLDC MotorkandibanNessuna valutazione finora
- Analysis of Non-Isolated Bidirectional DC-DC Converter With ZVSDocumento7 pagineAnalysis of Non-Isolated Bidirectional DC-DC Converter With ZVSAnuja VargheseNessuna valutazione finora
- Time Domain Based Digital PWM Controller For DC-DC ConverterDocumento12 pagineTime Domain Based Digital PWM Controller For DC-DC ConverterTetiHidayatiNessuna valutazione finora
- TO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemDocumento11 pagineTO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemLava KumarNessuna valutazione finora
- 486 N20038 PDFDocumento6 pagine486 N20038 PDFguddu13481Nessuna valutazione finora
- Anu PDFDocumento9 pagineAnu PDFAkhtarNessuna valutazione finora
- An-278 EtherCAT Error CodesDocumento7 pagineAn-278 EtherCAT Error CodesPham Long100% (1)
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocumento5 pagineSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNessuna valutazione finora
- Design of Microstrip Patch Antenna Using Slotted Partial Ground and Addition of Stairs and Stubs For UWB ApplicationDocumento8 pagineDesign of Microstrip Patch Antenna Using Slotted Partial Ground and Addition of Stairs and Stubs For UWB ApplicationNidhi PanditNessuna valutazione finora
- 5.3 Plasma Surface Transition: 5.3.1 Plasma Boundary Sheath, Bohm CriterionDocumento8 pagine5.3 Plasma Surface Transition: 5.3.1 Plasma Boundary Sheath, Bohm CriterioniordacheNessuna valutazione finora
- DSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocumento18 pagineDSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992Nessuna valutazione finora
- Regression Model For Tuning PID ControllerDocumento11 pagineRegression Model For Tuning PID ControllerSreepradha SivaramNessuna valutazione finora
- 5-SpatialFiltering 2Documento74 pagine5-SpatialFiltering 2pham tamNessuna valutazione finora
- Linux Kernel Internal.2Documento168 pagineLinux Kernel Internal.2iiiiiksh100% (1)
- Cover Sheet of Block Logic Diagram and Schematic Diagram Drawings Bus Transfer System (BTS) Panel Block Logic Diagram and Schematic DiagramDocumento17 pagineCover Sheet of Block Logic Diagram and Schematic Diagram Drawings Bus Transfer System (BTS) Panel Block Logic Diagram and Schematic Diagramindrajit mondalNessuna valutazione finora
- WinCE Development NoteDocumento3 pagineWinCE Development Noteadmred_quimicosNessuna valutazione finora
- 0471317780Documento21 pagine0471317780haribabu448Nessuna valutazione finora
- Eview On Plasma Arc Technology in Waste Management Elba Helen George, Lathi KarthiDocumento6 pagineEview On Plasma Arc Technology in Waste Management Elba Helen George, Lathi KarthiEkky IlhamNessuna valutazione finora
- Eetop - CN - Springer.2013 - Delta-Sigma AD-Converters-1 PDFDocumento156 pagineEetop - CN - Springer.2013 - Delta-Sigma AD-Converters-1 PDFЮрий КатунинNessuna valutazione finora
- AN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipDocumento48 pagineAN1114 - Switch Mode Power Supply (SMPS) Topologies (Part I) - MicrochipbmmostefaNessuna valutazione finora
- Analysing Malicious CodeDocumento196 pagineAnalysing Malicious Codeuchiha madaraNessuna valutazione finora
- ThesisDocumento75 pagineThesishodeegits9526Nessuna valutazione finora
- PDC Lab ManualDocumento33 paginePDC Lab ManualBhanu SriNessuna valutazione finora
- Fully Integrated On-Chip Switched Capacitor DC-DC ConvertersDocumento136 pagineFully Integrated On-Chip Switched Capacitor DC-DC ConvertersasamarahNessuna valutazione finora
- Project 3: Writing A Kernel From Scratch: 15-410 Operating SystemsDocumento44 pagineProject 3: Writing A Kernel From Scratch: 15-410 Operating SystemsJim ZhangNessuna valutazione finora
- Embedde, D SystemsDocumento91 pagineEmbedde, D SystemsVijay PreethamNessuna valutazione finora
- Robot Programming in "C": Tak Auyeung, Ph.D. February 15, 2006Documento160 pagineRobot Programming in "C": Tak Auyeung, Ph.D. February 15, 2006MaYur D AeronNessuna valutazione finora
- An Introduction To Digital Signal Processing: Edmund M-K. LaiDocumento224 pagineAn Introduction To Digital Signal Processing: Edmund M-K. LaiSalam ArifNessuna valutazione finora
- SMD Question BankDocumento2 pagineSMD Question BankBharatNessuna valutazione finora
- Design A Single Phase Inverter With A LCL Filter: AbstractDocumento4 pagineDesign A Single Phase Inverter With A LCL Filter: AbstractPham Viet QuanNessuna valutazione finora
- Automatic Room Light Controller and CounterDocumento20 pagineAutomatic Room Light Controller and CounterleopaulyNessuna valutazione finora
- 8049Documento239 pagine8049adnantanNessuna valutazione finora
- Eia 232 422 486Documento40 pagineEia 232 422 486Supriya DessaiNessuna valutazione finora
- Project ReportDocumento24 pagineProject ReporthoodychanNessuna valutazione finora
- Embedded System Design With ARM Cortex M Microcontrollers ApplicationsDocumento576 pagineEmbedded System Design With ARM Cortex M Microcontrollers ApplicationsMarcos Aurélio RodriguesNessuna valutazione finora
- 04 - Comparators and Offset Cancellation TechniquesDocumento68 pagine04 - Comparators and Offset Cancellation Techniquesjosh100% (2)
- A Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DriveDocumento8 pagineA Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DrivePraful YadavNessuna valutazione finora
- Design and Analysis of Low Power Bandgap Voltage ReferenceDocumento8 pagineDesign and Analysis of Low Power Bandgap Voltage ReferencePraveen Kumar ReddyNessuna valutazione finora
- Development of A BLDC Motor Drive With Improved Output CharacteristicsDocumento4 pagineDevelopment of A BLDC Motor Drive With Improved Output CharacteristicskurlshNessuna valutazione finora
- Sar Adc 65nm PHD PDFDocumento87 pagineSar Adc 65nm PHD PDFLex LutherNessuna valutazione finora
- Analog Ic Design Biomedical PDFDocumento162 pagineAnalog Ic Design Biomedical PDFCainãNessuna valutazione finora
- Analog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsDocumento42 pagineAnalog and RF Filters Design Manual:: A Filter Design Guide by and For WMU StudentsThevesteNessuna valutazione finora
- Power Supplies Module 03Documento20 paginePower Supplies Module 03LeonardoXanMNessuna valutazione finora
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDa EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNessuna valutazione finora
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsDa EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNessuna valutazione finora
- Real-Time Simulation Technology for Modern Power ElectronicsDa EverandReal-Time Simulation Technology for Modern Power ElectronicsNessuna valutazione finora
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsDa EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNessuna valutazione finora
- Continuous Glucose Monitoring (CGM) and Sensor-Augmented Pump Therapy (SAP)Da EverandContinuous Glucose Monitoring (CGM) and Sensor-Augmented Pump Therapy (SAP)Nessuna valutazione finora
- SVPWM Scheme For Two-Level and Three Level Inverter Fed Induction Motor DriveDocumento6 pagineSVPWM Scheme For Two-Level and Three Level Inverter Fed Induction Motor DriveEzra NaveenaNessuna valutazione finora
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocumento6 pagineMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadNessuna valutazione finora
- A New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning SystemDocumento12 pagineA New Control Scheme of A Cascaded Transformer Type Multilevel PWM Inverter For A Residential Photovoltaic Power Conditioning Systemmj5995Nessuna valutazione finora
- A Single Phase, Single Stage Three Level Boost DC - DC ConverterDocumento5 pagineA Single Phase, Single Stage Three Level Boost DC - DC Converterijsret100% (1)
- 50hz Sine PWM Using Tms320f2812 DSPDocumento10 pagine50hz Sine PWM Using Tms320f2812 DSPsivananda11Nessuna valutazione finora
- F2812 DSP Full TutorialDocumento517 pagineF2812 DSP Full Tutorialskesler100% (5)
- 2812 - Ezdsp - E Book 2Documento35 pagine2812 - Ezdsp - E Book 2sivananda11Nessuna valutazione finora
- DSP For Space VectorDocumento73 pagineDSP For Space Vectorsivananda11Nessuna valutazione finora
- Generate 1Khz PWM Using TMS320F2812Documento8 pagineGenerate 1Khz PWM Using TMS320F2812sivananda11Nessuna valutazione finora
- Control DSP281x Headers NonBIOSDocumento3 pagineControl DSP281x Headers NonBIOSsivananda11Nessuna valutazione finora
- Doc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFDocumento66 pagineDoc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFsivananda11Nessuna valutazione finora
- DC 850 X12 5010 I01 Purchase OrderDocumento40 pagineDC 850 X12 5010 I01 Purchase OrderGeervani SowduriNessuna valutazione finora
- Rattan Pole BendingDocumento21 pagineRattan Pole Bendingcintamore_jos355Nessuna valutazione finora
- EEPW3142 QP Version-ADocumento8 pagineEEPW3142 QP Version-A3nathNessuna valutazione finora
- ADP ObservationDocumento15 pagineADP ObservationSanjay SNessuna valutazione finora
- 2014 Rude Customer ServiceDocumento3 pagine2014 Rude Customer ServiceCaptain WalkerNessuna valutazione finora
- MIC DatasheetDocumento16 pagineMIC DatasheetArosh Thiwanka LiveraNessuna valutazione finora
- Foot Step Power Generation Using Piezoelectric MaterialDocumento3 pagineFoot Step Power Generation Using Piezoelectric MaterialYogeshNessuna valutazione finora
- Control Systems Vs Machine LearningDocumento2 pagineControl Systems Vs Machine LearningSufiyan N-YoNessuna valutazione finora
- Fully Automated Luxury CommunismDocumento8 pagineFully Automated Luxury CommunismNicoleta MeruțiuNessuna valutazione finora
- Nob - Data Center - DammamDocumento1 paginaNob - Data Center - DammamImthiyazAliAhamedHNessuna valutazione finora
- Field Trip Grading RubricDocumento1 paginaField Trip Grading Rubricapi-242613835Nessuna valutazione finora
- Ind Mkt. Caselet 1Documento6 pagineInd Mkt. Caselet 1harshalNessuna valutazione finora
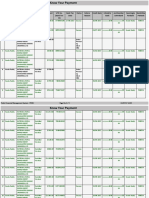
- SR No. Beneficiary Name Scheme Name Purpose Amount Utr No. (Bank TXN Id) Bank TXN Date Status Failure Reason Credit Date Uidasper Bank Acctnumber Asperbank Favoringas Perbank Bankiinas PerbankDocumento3 pagineSR No. Beneficiary Name Scheme Name Purpose Amount Utr No. (Bank TXN Id) Bank TXN Date Status Failure Reason Credit Date Uidasper Bank Acctnumber Asperbank Favoringas Perbank Bankiinas PerbankAnand ReddyNessuna valutazione finora
- Stm32 Mcu FamilyDocumento12 pagineStm32 Mcu FamilyriverajluizNessuna valutazione finora
- Electrical Equipment in Hazardous LocationsDocumento41 pagineElectrical Equipment in Hazardous LocationsSAYEDNessuna valutazione finora
- Development Processes and OrganizationsDocumento41 pagineDevelopment Processes and OrganizationsPuneet GoelNessuna valutazione finora
- Boq IDocumento7 pagineBoq IAmolNessuna valutazione finora
- Deepak ResumeDocumento3 pagineDeepak ResumethiyaguyNessuna valutazione finora
- Installation Removal Maintaining Shrink Discs 3 Part enDocumento8 pagineInstallation Removal Maintaining Shrink Discs 3 Part enhadimarviNessuna valutazione finora
- Influence of Nano - Sized Powder Content On Physical Properties of Waste Acid Refractory BrickDocumento19 pagineInfluence of Nano - Sized Powder Content On Physical Properties of Waste Acid Refractory BrickamnajamNessuna valutazione finora
- Skills, Techniques and Production in Contemporary Art HANDOUT PDFDocumento4 pagineSkills, Techniques and Production in Contemporary Art HANDOUT PDFKeyy TaezaNessuna valutazione finora
- Chapter 5 SupplementsDocumento5 pagineChapter 5 SupplementsGabriela MironNessuna valutazione finora
- Muhammad ALI Azmi: Contact +62 812 1944 5086 Komplek Poin Mas Blok F-2 No. 20B, Depok, Jawa BaratDocumento1 paginaMuhammad ALI Azmi: Contact +62 812 1944 5086 Komplek Poin Mas Blok F-2 No. 20B, Depok, Jawa BaratanggaraNessuna valutazione finora
- The Truth About Fuelless Motors Popular Science 1928Documento3 pagineThe Truth About Fuelless Motors Popular Science 1928Celestial Shaman100% (2)
- Seipl Profile and CapabilitiesDocumento32 pagineSeipl Profile and CapabilitiesAbhishek GuptaNessuna valutazione finora
- Nissan in EuropeDocumento24 pagineNissan in Europeonlyur44Nessuna valutazione finora
- Buku Program Kopo 18Documento20 pagineBuku Program Kopo 18Mieza Binti YusoffNessuna valutazione finora