Potrebbero piacerti anche
- Chapter 1.1-1.2 Prob TsoDocumento100 pagineChapter 1.1-1.2 Prob TsoEvan LittleNessuna valutazione finora
- Ca 2015Documento3 pagineCa 2015Evan LittleNessuna valutazione finora
- Complex Functions As MappingDocumento3 pagineComplex Functions As MappingAbdul Mustafa RazaviNessuna valutazione finora
- MGF 3301 Bridge To Abstract Mathematics Fall 2014 Exam 1: Theory PartDocumento1 paginaMGF 3301 Bridge To Abstract Mathematics Fall 2014 Exam 1: Theory PartEvan LittleNessuna valutazione finora
- MGF3301 Bridge Fall2014 Test2 DefinitionsDocumento1 paginaMGF3301 Bridge Fall2014 Test2 DefinitionsEvan LittleNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Module 1 Properties of QuadrilateralsDocumento27 pagineModule 1 Properties of QuadrilateralsHenry Languisan100% (2)
- M2.2 KinematicsDocumento26 pagineM2.2 KinematicsThomas GuoNessuna valutazione finora
- General Mathematics or Mathematics (Core)Documento17 pagineGeneral Mathematics or Mathematics (Core)Akpevweoghene Kelvin IdogunNessuna valutazione finora
- Writing and Graphing Linear Equations 1 1Documento62 pagineWriting and Graphing Linear Equations 1 1api-32711519150% (2)
- Newton's Law of Motion - First, Second & Third - PhysicsDocumento9 pagineNewton's Law of Motion - First, Second & Third - PhysicsPAULBENEDICT CATAQUIZ100% (1)
- Year 10 Interactive Maths - Second Edition: Directions and BearingsDocumento8 pagineYear 10 Interactive Maths - Second Edition: Directions and BearingsrhobiecorboNessuna valutazione finora
- Final Dissertation Paper - Role of Open Spaces in LearningDocumento8 pagineFinal Dissertation Paper - Role of Open Spaces in LearninghasnaNessuna valutazione finora
- Time and Background Independence: A ResponseDocumento7 pagineTime and Background Independence: A ResponsecalamartNessuna valutazione finora
- Challenges of Cyber Crime For CriminologyDocumento3 pagineChallenges of Cyber Crime For CriminologyShashi DasNessuna valutazione finora
- Sound Space and ArchitectureDocumento4 pagineSound Space and ArchitectureAvi SahaNessuna valutazione finora
- Projectile Motion 2Documento15 pagineProjectile Motion 2Ayman EidNessuna valutazione finora
- (Graduate Studies in Mathematics) Luis Barreira, Claudia Valls-Ordinary Differential Equations - Qualitative Theory-American Mathematical Society (2012)Documento265 pagine(Graduate Studies in Mathematics) Luis Barreira, Claudia Valls-Ordinary Differential Equations - Qualitative Theory-American Mathematical Society (2012)BrunoDanielGómezLabra100% (3)
- Cambridge IGCSE: English As A Second Language 0510/52Documento24 pagineCambridge IGCSE: English As A Second Language 0510/52Mihaela Cristina LazarNessuna valutazione finora
- Irigaray Sexual Difference 2Documento8 pagineIrigaray Sexual Difference 2LCLibraryNessuna valutazione finora
- Elements of Analytical Mechanics: MEEN 617 - Handout 4aDocumento20 pagineElements of Analytical Mechanics: MEEN 617 - Handout 4aOliver KrausNessuna valutazione finora
- Law of MotionDocumento48 pagineLaw of MotionPiyush VidyarthiNessuna valutazione finora
- MS-103 Calculus and Analytic Geometry CISDocumento4 pagineMS-103 Calculus and Analytic Geometry CISfaizNessuna valutazione finora
- Auto Cad BasicsDocumento28 pagineAuto Cad Basics01ranjit143Nessuna valutazione finora
- Chapter 4Documento70 pagineChapter 4hemysbakery45Nessuna valutazione finora
- 3 Geometry Import-Altair FluxDocumento158 pagine3 Geometry Import-Altair FluxhonghieutrNessuna valutazione finora
- 7 Hard Trig Problems: Can You Solve These Challenging Geometry PuzzlesDocumento6 pagine7 Hard Trig Problems: Can You Solve These Challenging Geometry Puzzleskaushik247Nessuna valutazione finora
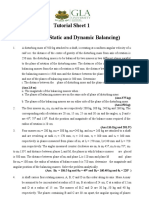
- Tutorial Sheet 1Documento3 pagineTutorial Sheet 1Shashank SrivastavaNessuna valutazione finora
- Technical Drawing Geometry Portfolio Rubric-Student VersionDocumento1 paginaTechnical Drawing Geometry Portfolio Rubric-Student Versionolvernejacobs9741100% (3)
- Circular Motion Principles For SatellitesDocumento3 pagineCircular Motion Principles For Satellitesmani420420Nessuna valutazione finora
- Radon TransformDocumento9 pagineRadon TransformKonglomerate0% (1)
- Fallout Shelter PDFDocumento380 pagineFallout Shelter PDFAlan Rutherford100% (9)
- MCQs on Displacement, Velocity and AccelerationDocumento8 pagineMCQs on Displacement, Velocity and AccelerationAdliNessuna valutazione finora
- P2 Chp12 VectorsDocumento18 pagineP2 Chp12 VectorsAshwin LingamNessuna valutazione finora
- Sat Mock 3Documento10 pagineSat Mock 3shipraNessuna valutazione finora
- Motion in Space: Velocity and AccelerationDocumento34 pagineMotion in Space: Velocity and AccelerationCrystal MaxNessuna valutazione finora