Potrebbero piacerti anche
- PipeFlow Tutorial 2012Documento10 paginePipeFlow Tutorial 2012Karthick BalajiNessuna valutazione finora
- Tutorial - Set Up and Run A PolyFoam SimulationDocumento12 pagineTutorial - Set Up and Run A PolyFoam SimulationEduardoNessuna valutazione finora
- Designing A SwitchbackDocumento23 pagineDesigning A SwitchbackEnrique Cruz Checco100% (1)
- Lift Mechanism (Adams)Documento13 pagineLift Mechanism (Adams)Rhaian BarrosNessuna valutazione finora
- GiD User ManualDocumento169 pagineGiD User ManualjcazNessuna valutazione finora
- FLUENT MDM Tut 03 3d Checkvalve DiffusionDocumento28 pagineFLUENT MDM Tut 03 3d Checkvalve DiffusionRajeuv GovindanNessuna valutazione finora
- WS24 Bracket PinDocumento20 pagineWS24 Bracket PinNurul HudaNessuna valutazione finora
- Practifa Final PetrelDocumento23 paginePractifa Final PetrelJesusMamaniMamaniNessuna valutazione finora
- Introduction To Using ANSYS FLUENTDocumento16 pagineIntroduction To Using ANSYS FLUENTkelvin felix garciaNessuna valutazione finora
- CATIA AdvancedDocumento36 pagineCATIA AdvancedLawrenceNessuna valutazione finora
- Tutorial: Drop Ejection From A Printhead Nozzle: 26.3, Setting Up The VOF ModelDocumento15 pagineTutorial: Drop Ejection From A Printhead Nozzle: 26.3, Setting Up The VOF ModelSandeepGuptaNessuna valutazione finora
- SIMULATION LaminarPipeFlow NumericalResults 210616 0119 15520 PDFDocumento4 pagineSIMULATION LaminarPipeFlow NumericalResults 210616 0119 15520 PDFasheruddinNessuna valutazione finora
- SimMan Tut 01 BackstepDocumento20 pagineSimMan Tut 01 BackstepVenkata VasanthaNessuna valutazione finora
- FLUENT - Tutorial - VOF - Drop Ejection From A Printhead NozzleDocumento11 pagineFLUENT - Tutorial - VOF - Drop Ejection From A Printhead Nozzlemootaz_ahmed464Nessuna valutazione finora
- Fracture Mechanics Practical FileDocumento21 pagineFracture Mechanics Practical Filesubashish100% (1)
- FLUENT IC Tut 04 PremixedDocumento36 pagineFLUENT IC Tut 04 PremixedKarthik Srinivas100% (2)
- 08 InkjetDocumento15 pagine08 InkjetWeb LogueandoNessuna valutazione finora
- Chapter-5 Design Methodoly of Microstrip Rat-Race Coupler: 5.1 Step 1: Opening A New ProjectDocumento15 pagineChapter-5 Design Methodoly of Microstrip Rat-Race Coupler: 5.1 Step 1: Opening A New ProjectSAITEJANessuna valutazione finora
- FLUENT MDM Tut 06 Vane PumpDocumento33 pagineFLUENT MDM Tut 06 Vane PumpRajeuv GovindanNessuna valutazione finora
- Exercise5 PDFDocumento69 pagineExercise5 PDFSelva GanapathyNessuna valutazione finora
- HFSS ConnectorDocumento28 pagineHFSS ConnectorLocus RootNessuna valutazione finora
- Tutorial: Simulate In-Cylinder Premixed Combustion Using ECFM ModelDocumento35 pagineTutorial: Simulate In-Cylinder Premixed Combustion Using ECFM ModelKarthik Srinivas100% (1)
- Mill Lesson 8Documento71 pagineMill Lesson 8Putra PuguhNessuna valutazione finora
- Exercise CreateNewStudy Part1 StudyDetails PDFDocumento12 pagineExercise CreateNewStudy Part1 StudyDetails PDFSergio OrduñaNessuna valutazione finora
- Pro Mechanism11Documento6 paginePro Mechanism11Cong UtNessuna valutazione finora
- Wire Frame Model: Master X7Documento3 pagineWire Frame Model: Master X7lion009Nessuna valutazione finora
- Procedure:: Defining ConstraintsDocumento5 pagineProcedure:: Defining ConstraintsPraveen SreedharanNessuna valutazione finora
- Four Bar Velocity - Reyes Lab 03Documento4 pagineFour Bar Velocity - Reyes Lab 03Angelo Reyes G.Nessuna valutazione finora
- Problem 5: Fighter Jet Vectoring Nozzle. - 1Documento72 pagineProblem 5: Fighter Jet Vectoring Nozzle. - 1Selva GanapathyNessuna valutazione finora
- ANSY Flow N-ExcerDocumento53 pagineANSY Flow N-Excerapolo240382Nessuna valutazione finora
- Lab 6 - Potentiometer & Servo MotorDocumento7 pagineLab 6 - Potentiometer & Servo MotorChristy CheriyanNessuna valutazione finora
- Modul GambitDocumento606 pagineModul GambitsafridasashaNessuna valutazione finora
- 11 DDPMDocumento13 pagine11 DDPMWeb LogueandoNessuna valutazione finora
- Roll-Forming Single Station Simufact FormingDocumento28 pagineRoll-Forming Single Station Simufact FormingNoridzwan Nordin100% (1)
- Truonglana@yahoo: Raining UideDocumento54 pagineTruonglana@yahoo: Raining UideTruonglanaNessuna valutazione finora
- BallTank Foundation Design Guide Using AFES 21pDocumento51 pagineBallTank Foundation Design Guide Using AFES 21pcgingenieros100% (1)
- CIM and Automation Lab ManualDocumento39 pagineCIM and Automation Lab ManualHareesha N G67% (3)
- Analysis of Truss Using Abaqus SoftwareDocumento7 pagineAnalysis of Truss Using Abaqus SoftwareKarthick NNessuna valutazione finora
- Pipe Flow Tutorial 2014Documento21 paginePipe Flow Tutorial 2014حيدر علاءNessuna valutazione finora
- Abaqus Worksheet Jan 19 PDFDocumento6 pagineAbaqus Worksheet Jan 19 PDFAMAN VERMANessuna valutazione finora
- Abaqus CAE Self Contact Tutorial: Problem DescriptionDocumento23 pagineAbaqus CAE Self Contact Tutorial: Problem DescriptionMohammed Abu SufianNessuna valutazione finora
- Lab 1Documento14 pagineLab 1Flávia de Souza BastosNessuna valutazione finora
- RD-3510 Cantilever Beam With Bolt PretensionDocumento13 pagineRD-3510 Cantilever Beam With Bolt PretensionVinoth BalasubramaniyanNessuna valutazione finora
- Creo Parametric Basic TutorialDocumento27 pagineCreo Parametric Basic TutorialKartik YadavNessuna valutazione finora
- Tutorials: Tutorial 1Documento16 pagineTutorials: Tutorial 1Umanath R PoojaryNessuna valutazione finora
- CATIA - Wireframe and Surface Design ExercisesDocumento20 pagineCATIA - Wireframe and Surface Design ExercisesNavdeep Singh Sidhu80% (20)
- 3 Axis Mill Machining in CATIA TutorialDocumento24 pagine3 Axis Mill Machining in CATIA TutorialAlexandru PrecupNessuna valutazione finora
- Modeling and Simulation of Logistics Flows 3: Discrete and Continuous Flows in 2D/3DDa EverandModeling and Simulation of Logistics Flows 3: Discrete and Continuous Flows in 2D/3DNessuna valutazione finora
- CATIA V5-6R2015 Basics - Part II: Part ModelingDa EverandCATIA V5-6R2015 Basics - Part II: Part ModelingValutazione: 4.5 su 5 stelle4.5/5 (3)
- Autodesk 3ds Max 2015 Essentials: Autodesk Official PressDa EverandAutodesk 3ds Max 2015 Essentials: Autodesk Official PressValutazione: 1 su 5 stelle1/5 (1)
- Certified Solidworks Professional Advanced Weldments Exam PreparationDa EverandCertified Solidworks Professional Advanced Weldments Exam PreparationValutazione: 5 su 5 stelle5/5 (1)
- Certified Solidworks Professional Advanced Sheet Metal Exam PreparationDa EverandCertified Solidworks Professional Advanced Sheet Metal Exam PreparationValutazione: 5 su 5 stelle5/5 (4)
- NX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)Da EverandNX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)Nessuna valutazione finora
- NX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Da EverandNX 9 for Beginners - Part 2 (Extrude and Revolve Features, Placed Features, and Patterned Geometry)Nessuna valutazione finora
- Autodesk 3ds Max 2014 Essentials: Autodesk Official PressDa EverandAutodesk 3ds Max 2014 Essentials: Autodesk Official PressNessuna valutazione finora
- Autodesk 3ds Max 2024: A Comprehensive Guide, 24th EditionDa EverandAutodesk 3ds Max 2024: A Comprehensive Guide, 24th EditionNessuna valutazione finora
- AutoCAD 2015 and AutoCAD LT 2015: No Experience Required: Autodesk Official PressDa EverandAutoCAD 2015 and AutoCAD LT 2015: No Experience Required: Autodesk Official PressNessuna valutazione finora
- 01 How Much Mesh Refinement Should I DoDocumento13 pagine01 How Much Mesh Refinement Should I DoMario MereniNessuna valutazione finora
- Hardox 400 Uk PDFDocumento2 pagineHardox 400 Uk PDFMario MereniNessuna valutazione finora
- Gb8417domex500mc PDFDocumento2 pagineGb8417domex500mc PDFMario MereniNessuna valutazione finora
- Databladweldox960 Uk PDFDocumento2 pagineDatabladweldox960 Uk PDFMario MereniNessuna valutazione finora
- 059 062 PDFDocumento4 pagine059 062 PDFMario MereniNessuna valutazione finora
- Fairlane PinsDocumento46 pagineFairlane PinsMario MereniNessuna valutazione finora
- Moment TableDocumento16 pagineMoment TableMario MereniNessuna valutazione finora
- SKILLS M09E Trusses Part1 PDFDocumento77 pagineSKILLS M09E Trusses Part1 PDFMario MereniNessuna valutazione finora
- University of LeedsDocumento20 pagineUniversity of LeedsYasir KhanNessuna valutazione finora
- 1984 Population Report EthiopiaDocumento255 pagine1984 Population Report EthiopiaOsvaldas ZagurskasNessuna valutazione finora
- Stratigraphy MCQs With AnswerDocumento10 pagineStratigraphy MCQs With Answerkumar Harsh67% (3)
- Fermat Contest: Canadian Mathematics CompetitionDocumento4 pagineFermat Contest: Canadian Mathematics Competitionสฮาบูดีน สาและNessuna valutazione finora
- Heron's Formula For The Area of A Triangle - Shailesh A ShiraliDocumento9 pagineHeron's Formula For The Area of A Triangle - Shailesh A ShiraliAltananyNessuna valutazione finora
- The Modern Day Cult: by Antonio Panebianco, Jason Devine, Will RichardsDocumento11 pagineThe Modern Day Cult: by Antonio Panebianco, Jason Devine, Will RichardsAntonio PanebiancoNessuna valutazione finora
- Soal Pat Bahasa Inggris Kelas 5Documento5 pagineSoal Pat Bahasa Inggris Kelas 5Tini Bastuti Joyolaksono100% (1)
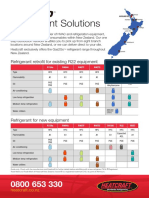
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDocumento2 pagineRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNessuna valutazione finora
- Igorot Village: Get To Know..Documento11 pagineIgorot Village: Get To Know..Elain RagosNessuna valutazione finora
- Driver DST-4812 For 7.2 KG CMDocumento5 pagineDriver DST-4812 For 7.2 KG CMWWW.150775.BUGME.PWNessuna valutazione finora
- Chapter 4 TurbineDocumento56 pagineChapter 4 TurbineHabtamu Tkubet EbuyNessuna valutazione finora
- 0707-Passive VoiceDocumento6 pagine0707-Passive VoiceKhôi TrầnNessuna valutazione finora
- Industrial Training Report (Kapar Power Plant)Documento40 pagineIndustrial Training Report (Kapar Power Plant)Hakeemi Baseri100% (2)
- Case Study Mental HealthDocumento12 pagineCase Study Mental Healthapi-603895785Nessuna valutazione finora
- MÁY 5 Service Manual Bellavista 1000 V16 08Documento126 pagineMÁY 5 Service Manual Bellavista 1000 V16 08Huế TrầnNessuna valutazione finora
- Agricultural Extension and CommunicationDocumento173 pagineAgricultural Extension and CommunicationAlfredo Conde100% (1)
- Edrolo ch3Documento42 pagineEdrolo ch3YvonneNessuna valutazione finora
- Sunday Afternoon, October 27, 2013: TechnologyDocumento283 pagineSunday Afternoon, October 27, 2013: TechnologyNatasha MyersNessuna valutazione finora
- Atlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis IslandDocumento31 pagineAtlantis Is Discovered - Atlantis in Middle Danubian Depression (Pannonian Basin) A New Location of Atlantis Islandpaulct2004721260% (10)
- HorticultureDocumento168 pagineHorticultureagni sahanaNessuna valutazione finora
- AE451 Aerospace Engineering Design: Team HDocumento140 pagineAE451 Aerospace Engineering Design: Team HÖmer Uğur ZayıfoğluNessuna valutazione finora
- Orona Fault CodesDocumento19 pagineOrona Fault CodesDanushka Bandara100% (1)
- Sip Dissertation - Final - Final For CollegeDocumento17 pagineSip Dissertation - Final - Final For Collegevikashirulkar922Nessuna valutazione finora
- 0.6m (2ft) Low Profile Antennas Microwave Antenna SpecificationsDocumento15 pagine0.6m (2ft) Low Profile Antennas Microwave Antenna SpecificationsDarwin Lopez AcevedoNessuna valutazione finora
- Chapter 1 Cumulative Review: Multiple ChoiceDocumento2 pagineChapter 1 Cumulative Review: Multiple ChoiceJ. LeeNessuna valutazione finora
- Indian Standard: Methods of Chemical Testing of LeatherDocumento75 pagineIndian Standard: Methods of Chemical Testing of LeatherAshish DixitNessuna valutazione finora
- LC Magna Leaflet 2019Documento2 pagineLC Magna Leaflet 2019saemiNessuna valutazione finora
- Hydrostatic, Deviatoric StressesDocumento7 pagineHydrostatic, Deviatoric StressespanbuNessuna valutazione finora
- Solid State Controller of Drives - ExperimentDocumento37 pagineSolid State Controller of Drives - ExperimentRakesh Singh LodhiNessuna valutazione finora
- (Q2) Electrochemistry 29th JulyDocumento21 pagine(Q2) Electrochemistry 29th JulySupritam KunduNessuna valutazione finora