Potrebbero piacerti anche
- Manual de Geologia para Ingenieros - Gonzalo Duque EscobarDocumento25 pagineManual de Geologia para Ingenieros - Gonzalo Duque EscobarlhhortuahNessuna valutazione finora
- Manual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFDocumento622 pagineManual de Geologia para Ingenieros - Gonzalo Duque Escobar PDFlhhortuahNessuna valutazione finora
- Formulación Y Evaluación de Proyectos Viales Y de TransporteDocumento400 pagineFormulación Y Evaluación de Proyectos Viales Y de Transportelhhortuah100% (2)
- Introducción A La Mecánica de Fluídos - Carlos A. Duarte PDFDocumento223 pagineIntroducción A La Mecánica de Fluídos - Carlos A. Duarte PDFlhhortuah58% (12)
- La Ingenieria de Suelos en Las Vias Terrestres Vol. 2Documento653 pagineLa Ingenieria de Suelos en Las Vias Terrestres Vol. 2Rigoberto Espinoza84% (25)
- NTC 121 NuevaDocumento17 pagineNTC 121 NuevalhhortuahNessuna valutazione finora
- Trabajo Completo HipertensionDocumento35 pagineTrabajo Completo HipertensionAleex SiguenzaNessuna valutazione finora
- 85 Curiosidades Que Posiblemente No Conocias Sobre TintínDocumento6 pagine85 Curiosidades Que Posiblemente No Conocias Sobre TintínRamón Suárez50% (2)
- Planificación Curricular Modelo para 4 AñosDocumento7 paginePlanificación Curricular Modelo para 4 AñosEduardoNessuna valutazione finora
- Libro RecetasDocumento194 pagineLibro RecetasLis Ensalander100% (14)
- ALIVIO DE PRESIONES DEL SISTEMA HIDRÁULICO 336DL Antes de Realizar Algun Desmontaje PDFDocumento5 pagineALIVIO DE PRESIONES DEL SISTEMA HIDRÁULICO 336DL Antes de Realizar Algun Desmontaje PDFRoberto AgandaNessuna valutazione finora
- Cuadro SinopticoDocumento2 pagineCuadro Sinopticoguadalupe del carmen gordillo lugo100% (1)
- Empieza A Organizar Los Torneos en Tu PaísDocumento17 pagineEmpieza A Organizar Los Torneos en Tu PaísGonzalo BurgosNessuna valutazione finora
- Ecosistema Clase para Sexto PDFDocumento5 pagineEcosistema Clase para Sexto PDFNana MosqueraNessuna valutazione finora
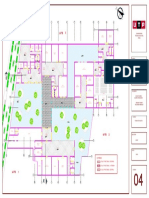
- PLano Flujos A ColorDocumento1 paginaPLano Flujos A ColorJeremy Dolores MéndezNessuna valutazione finora
- ESCOMBROSDocumento8 pagineESCOMBROSErickson YanquiNessuna valutazione finora
- Qué Es El Modelo OSIDocumento6 pagineQué Es El Modelo OSIAnnia GarciaNessuna valutazione finora
- G12, Herejías Destructoras PDFDocumento34 pagineG12, Herejías Destructoras PDFSpencer BCNessuna valutazione finora
- Analisis MatematicoDocumento12 pagineAnalisis MatematicoVeronica Martina Cacha Espinoza0% (1)
- Practica 4 y 5 Lab Fisica 4Documento12 paginePractica 4 y 5 Lab Fisica 4VictOor AlonsoNessuna valutazione finora
- Dinámica-Unidad 2-Actividades-406bDocumento23 pagineDinámica-Unidad 2-Actividades-406bcristian lagunesNessuna valutazione finora
- Estructuras de MaderaDocumento60 pagineEstructuras de MaderaScarlett De La Rosa100% (3)
- 4º Cyt - Pci 2022Documento8 pagine4º Cyt - Pci 2022Maribel DuranNessuna valutazione finora
- Teoria Errores USSDocumento18 pagineTeoria Errores USSpiero medinaNessuna valutazione finora
- Prueba HidraulicaDocumento25 paginePrueba HidraulicagliddenNessuna valutazione finora
- Secuencia Didactica Tercero-La Diversidad de AnimalesDocumento19 pagineSecuencia Didactica Tercero-La Diversidad de AnimalesMagali Maldonado88% (17)
- Plan de Gestion Integral de Residuos Solidos PMIRSDocumento24 paginePlan de Gestion Integral de Residuos Solidos PMIRSVivis SánchezNessuna valutazione finora
- Esquema Monografía Del TarwiDocumento26 pagineEsquema Monografía Del TarwiAnonymous 1Xw9uiFAcvNessuna valutazione finora
- Historia Del Perú: Primero de SecundariaDocumento249 pagineHistoria Del Perú: Primero de SecundariaIsai HerreraNessuna valutazione finora
- Guia 1 Funcion de Nutrición y Cadenas y Redes TróficasDocumento6 pagineGuia 1 Funcion de Nutrición y Cadenas y Redes Tróficassebastian ochoaNessuna valutazione finora
- FrutasDocumento10 pagineFrutasMarisol JimenezNessuna valutazione finora
- Argumentacion - Articulo de OpinionDocumento8 pagineArgumentacion - Articulo de Opinionyuliana elizabethNessuna valutazione finora
- ETICADocumento10 pagineETICARoger MooNessuna valutazione finora
- Primeros Auxilios 2Documento12 paginePrimeros Auxilios 2HBZ385Nessuna valutazione finora
- Medicação Intracanal T19Documento13 pagineMedicação Intracanal T19Nathalie PonceNessuna valutazione finora
- Amor Sirenas FriasDocumento247 pagineAmor Sirenas FriasLaura GandolfiNessuna valutazione finora